《机器学习基石》8-Noise and Error
这一节主要讨论在有噪声的情况下,VC维理论是否仍适用。
Noise and Probabilistic Target
回顾之前提到的机器学习的流程图,学习的目的,就是找到一个函数 g g ,使得它与目标函数 f f 差不多。

然而在现实生活中,往往伴随着噪声:

这些噪声的类别是多种多样的
- noise in y y :如标签标错了
- noise in x x :如原本的数据就存在噪声
没有噪音时, x x 服从同一个概率分布 P P , y=f(x) y = f ( x ) 是一个固定的值;有噪声时, x x 仍然服从同一个概率分布 P P , y∼P(y|x) y ∼ P ( y | x ) 不再是一个固定的值。
以之前提到的珠子为例子,珠子的两种颜色分别表示了 h(x) h ( x ) 与 f(x) f ( x ) 相等或者不等的情况。我们通过抽样,利用珠子属于某种颜色的频率来估计 h(x)=f(x) h ( x ) = f ( x ) 的概率。
在没有噪声的情况下, y y 是固定的,因此珠子的颜色是确定的。在有噪声的情况下, y y 不是固定的,因此珠子的颜色是变化的,此时我们仍然可以进行抽样的实验,只不过在进行统计的时候,我们记录的是珠子在抽出来那一刻的颜色。这样,我们就可以跟以前一样,通过频率来估计概率。
因此,只要 x∼P x ∼ P 并且 y∼P(y|x) y ∼ P ( y | x ) ,也就是说 (x,y)∼P(x,y) ( x , y ) ∼ P ( x , y ) ,VC维理论仍然适用。于是,学习的目的,从预测 f f 变成了预测 p(y|x) p ( y | x ) ,其中 p(y|x) p ( y | x ) 由 f(x) f ( x ) 以及噪声构成。
对于 f f ,我们可以将其想象为分布 P(y|x) P ( y | x ) 的一种特殊形式。
- y=f(x) y = f ( x ) 时, P(y|x)=1 P ( y | x ) = 1
- y≠f(x) y ≠ f ( x ) 时, P(y|x)=0 P ( y | x ) = 0
这样就可以将无噪声以及有噪声的情况统一起来,学习的流程图更新成以下形式:
Error Measure
我们需要有一个准则来衡量所选择的假设函数 g g 与目标函数 f f 相似程度,通常的方法是定义一个错误函数(也叫做代价函数) E(g,f) E ( g , f ) 。
这个错误函数描述的是在整个样本空间(不只是训练样本)中, g g 与 f f 的相似程度,并且通常来讲,是 g g 与 f f 在每个样本点上的错误的平均。
常用的两种错误衡量方式 err(g(x),f(x))=err(y~,y) e r r ( g ( x ) , f ( x ) ) = e r r ( y ~ , y ) :
- 0/1 error for classification: err(y~,y)=[y~≠y] e r r ( y ~ , y ) = [ y ~ ≠ y ]
- squared error for regression: err(y~,y)=(y~−y)2 e r r ( y ~ , y ) = ( y ~ − y ) 2
错误衡量准则会对学习过程起到指导作用,因此对于同一个问题,使用不同的错误衡量准则,得到的结果可能不一样。
对机器学习流程图进一步修改,加入了错误衡量的模块,该模块对算法和最终的假设选择都起着很大影响。

Algorithmic Error Measure
在现实中,要设计出真正的错误衡量有时候会很困难,在设计错误衡量方式时,常常使用替代的方式 err^ e r r ^ :
- 有意义的错误衡量
例如 0/1 error,表示的是 flipping 的噪声,如果 0/1 error 很小,说明出错的样本数很少;
例如 squared error,表示的是噪声是高斯的分布,如果 squared error 很小,说明高斯噪声很少; - 对设计算法容易的错误衡量
例如有闭式解的算法对应的错误衡量方式;
例如具有凸函数性质的错误衡量方式。
于是,学习的流程图改为下面的形式,其中 err e r r 表示的是真正的错误衡量方式,而 err^ e r r ^ 表示的是我们用在算法中的错误衡量方式,我们使用 err^ e r r ^ 来替代 err e r r 进行算法中的优化以及假设函数的选择。

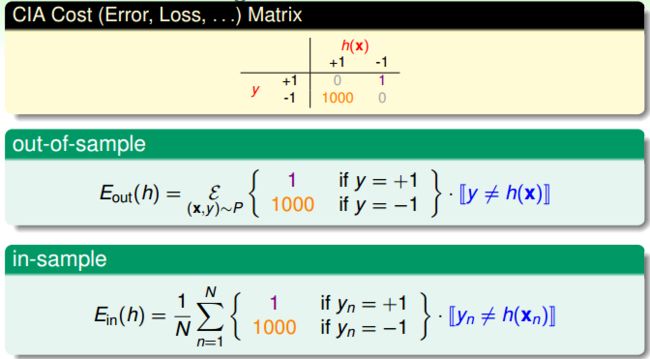
Weighted Classification
我们可以使用 cost matrix 表示 0/1 error

其中 false reject 表示的是把 y=+1 y = + 1 预测为 y=−1 y = − 1 ,false accept 表示的是把 y=−1 y = − 1 预测为 y=+1 y = + 1 。
当这两类错误的 cost 相等时,表示这两类错误的重要性一致,当这两类错误的 cost 不相等时,表示其中一种错误更加严重,代价更高。
于是我们可以根据实际的需要,赋予两种错误不同的代价,这叫做 weighted classification。
下面是一个 cost matrix 的例子,在这个例子中,把 y=+1 y = + 1 预测为 y=−1 y = − 1 的代价是 1 1 ,而把 y=−1 y = − 1 预测为 y=+1 y = + 1 的代价是 1000 1000 ,因此算法会惩罚后一种错误分类的情况。
通过改变样本的数目,可以将 weighted classification 转化为一般的 classification。用上一个例子来说明,我们可以将数据集中 y=−1 y = − 1 的样本复制 1000 份,这样就相当于在没有加权的 0/1 error 下进行实验。于是可以使用之前用于 0/1 error 的算法,比如 pocket 算法。

将上面 cost matrix 的转化嵌入到算法中,便得到了 weighted pocket 算法
