博客:blog.shinelee.me | 博客园 | CSDN
特征
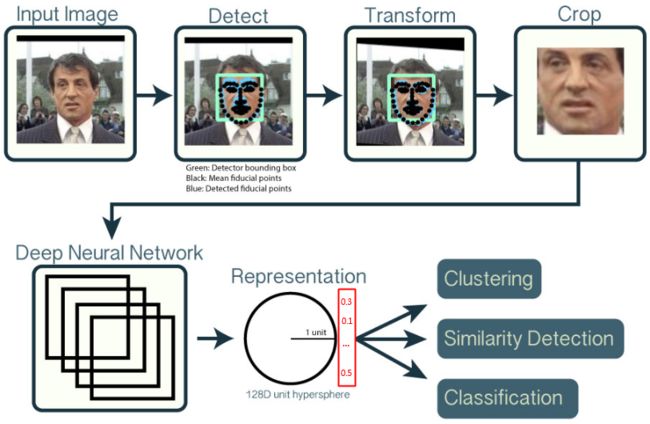
在计算机视觉领域,特征是为了完成某一特定任务需要的相关信息。比如,人脸检测中,我们需要在图像中提取特征来判断哪些区域是人脸、哪些区域不是人脸,人脸验证中,我们需要在两个人脸区域分别提取特征,来判断他们是不是同一个人,如下图所示,深度神经网络最终得到一个128维的特征用于识别等任务,图片来自Openface
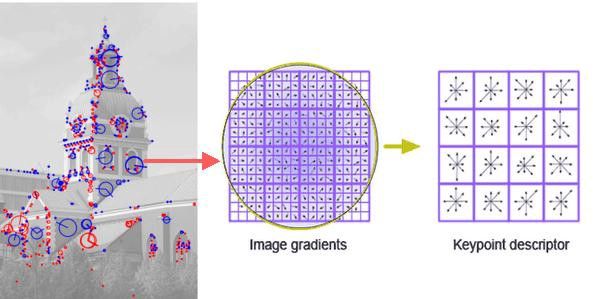
常用的特征包括:图像灰度or灰度、直方图、梯度、边缘、纹理、矩、SIFT、深度学习特征等等。以关键点特征为例,关键点指的是可以稳定出现的特殊点,如角点、局部极值点等,如上图中人脸中眼鼻口处的关键点,先检测图像中的关键点,然后在以该点为中心的邻域范围内提取信息,作为该点的特征描述。关键点特征的好处在于,关键点可以稳定复现同时其特征描述聚焦在关键点邻域内,对遮挡、形变等有很好鲁棒性。以SIFT描述子为例,其将关键点周围的梯度统计直方图作为该点的特征,如下图所示,图片来自链接。
不同的特征适用范围也不同,有些特征对光照敏感,有些特征对形变敏感,需要根据任务场景选择适合的特征——适合的才是最好的,不是什么时候都要上牛刀。如果任务场景简单,比如明确知道光照条件不变、人脸基本正面且表情妆容没有变化,可能直接使用灰度或梯度进行模板匹配就可以识别了,但如果场景复杂,光照可能变化、表情可能变化、人脸角度也不确定,那么为了完成任务,选取的特征就需要有较好的适应性,这就要谈到特征不变性。
特征不变性
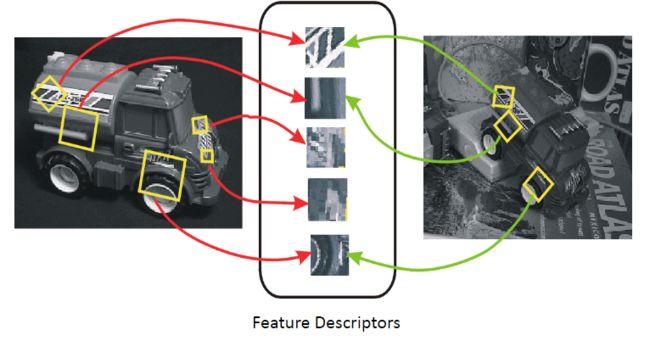
以上图为例,左右两图中玩具车的姿态不同、大小不同、图像亮度不同,对应局部(图中黄色小块)在各自图中的绝对位置不同、大小不同、方向不同、灰度不同,为了实现配准,就需要在局部提取的特征具有某些不变性,才能够匹配上。
- 几何不变性(geometric invariance):平移,旋转,尺度……
- 光度不变性(photometric invariance):亮度,曝光……
图像预处理通过对输入图像进行归一化(最大最小值归一化、均值方差归一化、直方图均衡化等),能在一定程度上做到对亮度或光照鲁棒。此外,在设计特征提取算法时,通过考虑相对信息和统计信息(比如梯度、直方图等),降低对灰度(颜色)绝对值的敏感度,可以进一步做到对亮度或光照鲁棒。
通过使用局部窗口内的像素信息和相对位置信息,局部特征一般都能做到平移无关。要做到旋转无关,则需要将窗口以某个主方向对齐后再提取局部特征,如图中倾斜的黄色小块,主方向可以是窗口内最集中的梯度方向。
接下来,讲述一下如何做到尺度无关。
尺度空间
尺度,可以通过地图的比例尺来理解,如下图所示,如果以100米为单位进行观测(称为图100),箭头处有一个角点A,如果以5米为单位进行观测(成为图5),则A附近多了一个凹陷B,而这个凹陷B在图100中是看不见的,为什么呢?尺度空间理论认为是被平滑掉了,即低尺度下可以看清细节,高尺度下细节会被平滑掉只剩下更“宏观”的特征,因此可知
- 特征是有尺度的,在某个尺度下B是关键点(图5中),但在更大的尺度下可能就不是了(图100中)
- 需要在对应的尺度下提取特征,既然B仅在图5的尺度下是关键点,其特征自然需要在图5的尺度下提取

如果两幅图像的尺度不同该如何匹配?图100和图5中的A是同一个点,但因为尺度不同,邻域差异很大,在各自的邻域中提取的特征自然不同,为了让它们能匹配上,需要对图5构建尺度空间,获得不同尺度下的表达,具体怎么做呢?保持图5图像尺寸不变,不断(高斯)平滑,直到B处的凹陷平滑没了(与图100相似),达到与图100相近的尺度,图100中在A邻域内(比如\(10 \times 10\))提取特征(比如SIFT),图5中在A邻域内(\(200 \times 200\))提取特征,两者在各自图像中提取的SIFT特征长度相同(将领域划分成同样数量的子区域,然后在子区域中统计梯度直方图,某种程度上讲是对邻域窗口的归一化后再提取特征),这样就可以匹配上了。
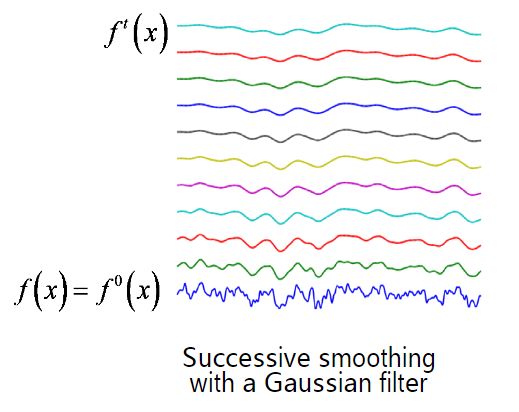
平滑类似如下过程,最下面一行为原始信号,每一行对应一个尺度:
一般来讲,在没有先验知识的情况下,对两幅图像分别在每个尺度上检测关键点并提取特征,总有某些关键点及其特征正好来自相同的尺度,如果它们恰好可以匹配上,则图像1和图像2匹配,反之,如果所有关键点都配不上,则图像1和图像2不匹配。
小结一下:尺度空间,是在信号长度不变的情况下(如上图\(f(x)\)到\(f^t(x)\)),通过(高斯)平滑,获得信号在不同尺度下的表达,然后使用尺度对应大小的窗口进行观测和提取特征。因为获得了原始信号在所有尺度下的特征,这些特征在整体上做到了尺度无关——因为原始信号各种尺度的特征都有了。
图像金字塔
尺度空间中,不同尺度下观测窗口的像素尺寸是不同,还有另外一种情况,保持观测窗口大小不变,让图像尺寸发生变化。以人脸检测为例,通常训练结束后,方法中用到的滤波器、卷积核的参数和尺寸就固定了,因此提取到的特征只适用于检测像素大小在某个范围内的人脸,超出这个范围的人脸就检测不出来了。但是,在没有先验知识的情况下,输入图像中人脸的像素大小是未知的,不同输入图像中人脸的像素尺寸也可能不同,怎么办?这是就要用到图像金字塔,如下图所示,使用RCNN检测人脸,图像中的人脸有大有小,通过构建图像金字塔来检测,图片来自链接。
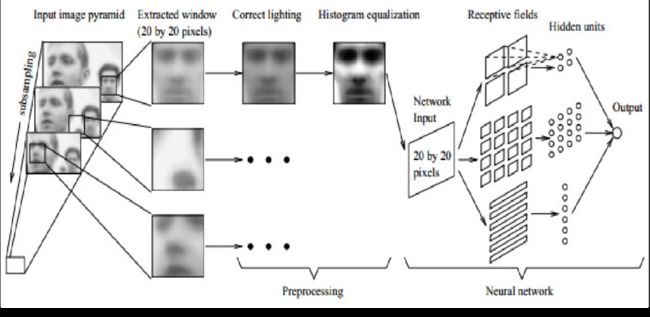
构建图像金字塔,是为了获得图像在不同尺寸(不同分辨率)下的表达,通过不断重复 平滑+下采样 的过程(也有通过插值Resize),获得了不同像素尺寸的人脸图像,其中只要有与网络适配的人脸就可以被检测出来。
小结一下:图像金字塔,是在保持观测窗口不变的情况下,获得输入图像在不同尺寸(分辨率)下的表达,在不同尺寸上提取到的特征在整体上做到了尺寸(分辨率)无关。实际使用中,一般采用2倍下采样,即金字塔中图像长宽逐层折半。
细心的读者可能已经发现,尺度空间和图像金字塔存在着某种关联,有种一体两面的感觉,实际上两者可以联合在一起使用,我们以后再谈。
总结
本文的重点在于讲述 几种特征不变性以及实现特征不变性的途径,对尺度空间和图像金字塔只是做了直观的介绍,后面会单独写文章详细讲解。
参考
- Feature (computer vision)
- Scale-invariant feature transform
- Pyramid (image processing)
- Scale space
- Pyramids and Scale Space
- Scale Space Theory and Applications