什么是线程?
人们在生活中处理复杂问题时,惯用的方法就是分而治之,即把一个大问题分解成多个相对简单、比较容易解决的小问题,小问题逐个被解决了,大问题也就随之解决了。同样,在设计一个较为复杂的应用程序时,也通常把一个大型任务分解成多个小任务,然后通过运行这些小任务,最终达到完成大任务的目的。
在裸机系统中, 系统的主体就是 main 函数里面顺序执行的无限循环,这个无限循环里面 CPU 按照顺序完成各种事情。在多线程系统中,我们根据功能的不同,把整个系统分割成一个个独立的且无法返回的函数,这个函数我们称为线程。
线程由哪些部分组成?
RT-Thread 中的线程由三部分组成:线程代码(函数)、线程控制块、线程堆栈。
线程栈
在一个裸机系统中, 如果有全局变量,有子函数调用,有中断发生。那么系统在运行的时候,全局变量放在哪里,子函数调用时,局部变量放在哪里, 中断发生时,函数返回地址发哪里。
如果只是单纯的裸机编程,它们放哪里我们不用管,但是如果要写一个 RTOS,这些种种环境参数,我们必须弄清楚他们是如何存储的。
在裸机系统中,他们统统放在一个叫栈的地方,栈是单片机 RAM 里面一段连续的内存空间,栈的大小一般在启动文件或者链接脚本里面指定, 最后由 C 库函数_main 进行初始化。
但是, 在多线程系统中,每个线程都是独立的,互不干扰的,所以要为每个线程都分配独立的栈空间,这个栈空间通常是一个预先定义好的全局数组, 也可以是动态分配的一段内存空间,但它们都存在于 RAM 中。 如:
static rt_uint8_t led_stack[512];线程栈其实就是一个预先定义好的全局数据,数据类型为rt_uint8_t,大小我们设置为 512。 在 RT-Thread 中,凡是涉及到数据类型的地方, RTThread 都会将标准的 C 数据类型用 typedef 重新取一个类型名, 以“rt”前缀开头。这些经过重定义的数据类型放在 rtdef.h ,如:

线程控制块
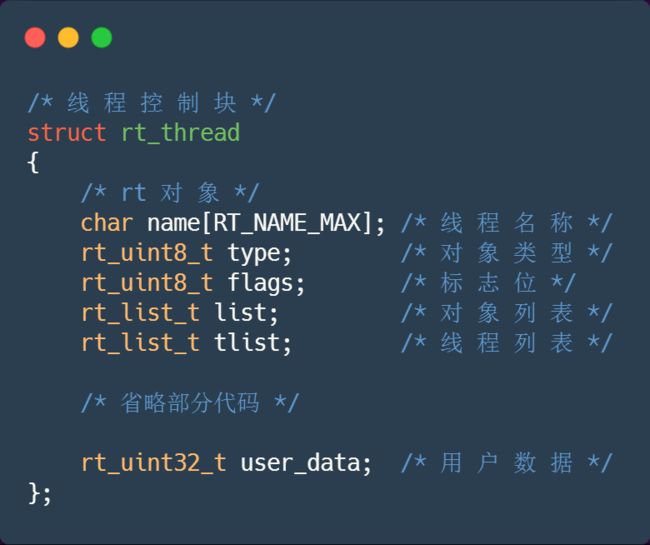
在 RT-Thread 中,线程控制块由结构体 struct rt_thread 表示,线程控制块是操作系统用于管理线程的一个数据结构,它会存放线程的一些信息,例如优先级、线程名称、线程状态等,也包含线程与线程之间连接用的链表结构,线程等待事件集合等,详细定义如下(在rtdef.h中定义):
为led线程定义一个线程控制块:
static struct rt_thread led_thread; 线程函数
线程控制块中的 entry 是线程的入口函数,它是线程实现预期功能的函数。线程的入口函数由用户设
计实现,一般有以下两种代码形式:
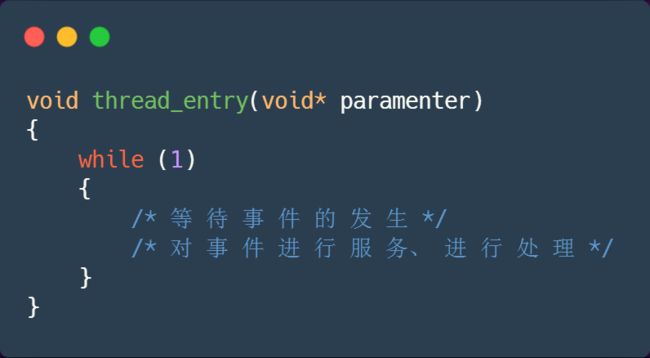
无限循环模式:
在实时系统中,线程通常是被动式的:这个是由实时系统的特性所决定的,实时系统通常总是等待外界事件的发生,而后进行相应的服务:
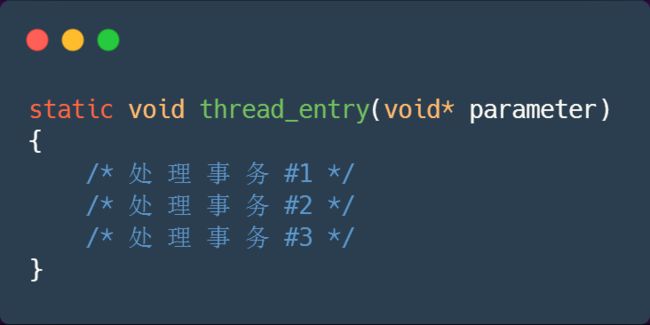
顺序执行或有限次循环模式:
如简单的顺序语句、 do whlie() 或 for() 循环等,此类线程不会循环或不会永久循环,可谓是 “一次性”线程,一定会被执行完毕。在执行完毕后,线程将被系统自动删除。
动态线程与静态线程
我们的用户线程有两种创建方式,一种是静态线程,另一种是动态线程。
创建静态线程的函数:
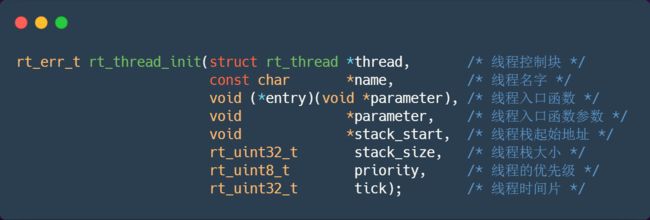
返回值为错误代码。
创建动态线程的函数:

返回值为线程控制块 。
线程创建实例
创建一个静态线程
1、确定线程栈
2、定义线程控制块
3、创建线程函数。
#include
#include
#include
/* 静态线程相关宏定义 */
#define THREAD_PRIORITY 25 /* 优先级 */
#define STACK_SIZE 512 /* 栈大小 */
#define TIMESLICE 5 /* 时间片 */
/* 线程三要素 */
static rt_uint8_t static_thread_stack[STACK_SIZE]; /* 线程栈 */
static struct rt_thread static_thread; /* 线程控制块 */
static void static_thread_entry(void* parameter); /* 线程入口函数 */
/* 静态线程入口函数 */
static void static_thread_entry(void* parameter)
{
rt_uint32_t i = 0;
rt_kprintf("This is static thread!\n");
/* 无限循环*/
while (1)
{
rt_kprintf("static thread count:%d \r\n", ++i);
/* 等待0.5s,让出cpu权限,切换到其他线程 */
rt_thread_delay(500);
}
}
/* 主函数 */
int main(void)
{
rt_err_t result;
/* 创建静态线程 : 优先级 25 ,时间片 5个系统滴答,线程栈512字节 */
result = rt_thread_init(&static_thread,
"static_thread",
static_thread_entry,
RT_NULL,
(rt_uint8_t*)&static_thread_stack[0],
STACK_SIZE,
THREAD_PRIORITY,
TIMESLICE);
/* 创建成功则启动静态线程 */
if (result == RT_EOK)
{
rt_thread_startup(&static_thread);
}
} 运行结果为:
可见,在T-Thread中创建一个线程需要线程栈、线程控制块与线程函数这三要素。除此之外,需要设置一个线程优先级,因为RT-Thread的调度器是基于优先级的抢占式调度算法。还需要设置一个时间片参数,这个用于多个线程具有同等优先级的情况下,采用时间片的轮转调度算法进行调度,这个值与时间节拍有关,每一秒的节拍数可在rtconfig.h里进行设置:

在这里我们只创建一个线程,所以时间片我们没有用到,但也需要传递一个时间片的值给rt_thread_init函数。最后,在主函数里调用相关接口创建一个静态线程,创建成功则启动该线程。
创建一个动态线程
创建动态线程与创建静态线程类似:
#include
#include
#include
/* 动态线程相关宏定义 */
#define THREAD_PRIORITY 25 /* 优先级 */
#define STACK_SIZE 512 /* 栈大小 */
#define TIMESLICE 5 /* 时间片 */
/* 线程三要素 */
static rt_uint8_t dynamic_thread_stack[STACK_SIZE]; /* 线程栈 */
static struct rt_thread dynamic_thread; /* 线程控制块 */
static void dynamic_thread_entry(void* parameter); /* 线程入口函数 */
/* 动态线程入口函数 */
static void dynamic_thread_entry(void* parameter)
{
rt_uint32_t i;
/* 无限循环*/
while (1)
{
for (i = 0; i < 5; i++)
{
rt_kprintf("dynamic thread count:%d \r\n", i);
/* 等待1s,让出cpu权限,切换到其他线程 */
rt_thread_delay(500);
}
}
}
/* 主函数 */
int main(void)
{
rt_thread_t tid; // 动态线程句柄
/* 创建动态线程 : 优先级 25 ,时间片 5个系统滴答,线程栈512字节 */
tid = rt_thread_create("dynamic_thread",
dynamic_thread_entry,
RT_NULL,
STACK_SIZE,
THREAD_PRIORITY,
TIMESLICE);
/* 创建成功则启动动态线程 */
if (tid != RT_NULL)
{
rt_thread_startup(tid);
}
} 运行结果:
静态线程VS动态线程
上例中,从运行结果上看,是没有任何差别的!那么,我们在实际中如何抉择?
使用静态线程时,必须先定义静态的线程控制块,并且定义好栈空间,然后调用rt_thread_init()函数来完成线程的初始化工作。采用这种方式,线程控制块和堆栈占用的内存会放在 RW/ZI 段,这段空间在编译时就已经确定,它不是可以动态分配的,所以不能被释放,而只能使用 rt_thread_detach()函数将该线程控制块从对象管理器中脱离。
使用动态定义方式 rt_thread_create()时, RT-Thread 会动态申请线程控制块和堆栈空间。在编译时,编译器是不会感知到这段空间的,只有在程序运行时, RT-Thread 才会从系统堆中申请分配这段内存空间,当不需要使用该线程时,调用 rt_thread_delete()函数就会将这段申请的内存空间重新释放到内存堆中。
这两种方式各有利弊,静态定义方式会占用 RW/ZI 空间,但是不需要动态分配内存,运行时效率较高,实时性较好。动态方式不会占用额外的 RW/ZI 空间,占用空间小,但是运行时需要动态分配内存,效率没有静态方式高。
总的来说,这两种方式就是空间和时间效率的平衡,可以根据实际环境需求选择采用具体的分配方式。就像C编程中,何时使用动态空间,何时使用静态空间,也需要根据实际情况平衡选择。
我的个人博客:https://zhengnianli.github.io/
我的微信公众号:嵌入式大杂烩