ROI Pooling层解析
ROI Pooling的意义
ROIs Pooling顾名思义,是Pooling层的一种,而且是针对RoIs的Pooling,他的特点是输入特征图尺寸不固定,但是输出特征图尺寸固定;
什么是ROI呢?
ROI是Region of Interest的简写,指的是在“特征图上的框”;
1)在Fast RCNN中, RoI是指Selective Search完成后得到的“候选框”在特征图上的映射,如下图所示;
2)在Faster RCNN中,候选框是经过RPN产生的,然后再把各个“候选框”映射到特征图上,得到RoIs。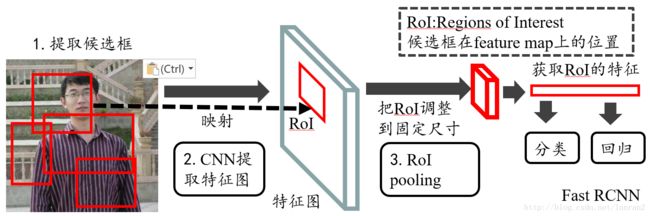
图1 Fast RCNN整体结构
往往经过rpn后输出的不止一个矩形框,所以这里我们是对多个ROI进行Pooling。
ROI Pooling的输入
输入有两部分组成:
1. 特征图:指的是图1中所示的特征图,在Fast RCNN中,它位于RoI Pooling之前,在Faster RCNN中,它是与RPN共享那个特征图,通常我们常常称之为“share_conv”;
2. rois:在Fast RCNN中,指的是Selective Search的输出;在Faster RCNN中指的是RPN的输出,一堆矩形候选框框,形状为1x5x1x1(4个坐标+索引index),其中值得注意的是:坐标的参考系不是针对feature map这张图的,而是针对原图的(神经网络最开始的输入)
ROI Pooling的输出
输出是batch个vector,其中batch的值等于RoI的个数,vector的大小为channel * w * h;RoI Pooling的过程就是将一个个大小不同的box矩形框,都映射成大小固定(w * h)的矩形框;
ROI Pooling的过程
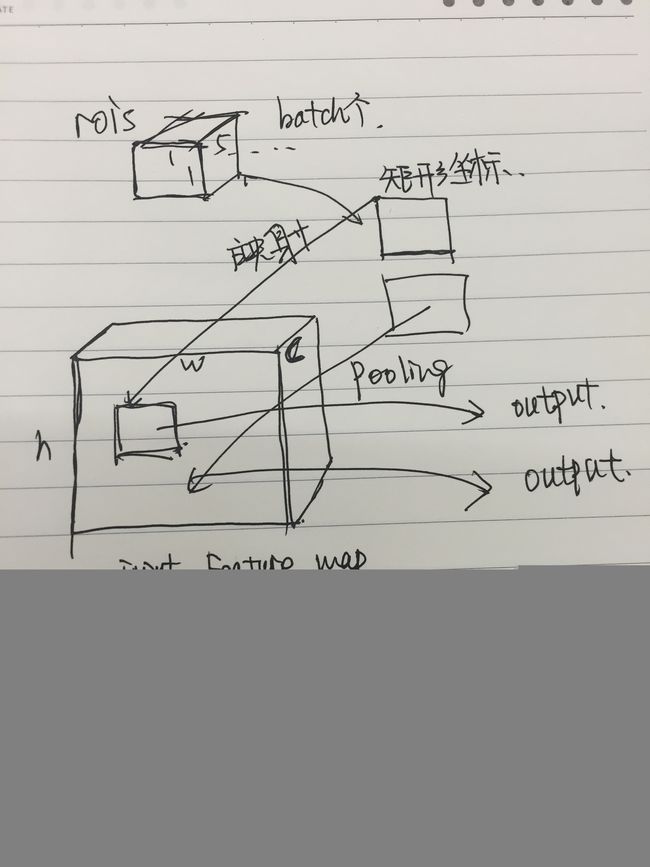
如图所示,我们先把roi中的坐标映射到feature map上,映射规则比较简单,就是把各个坐标除以“输入图片与feature map的大小的比值”,得到了feature map上的box坐标后,我们使用Pooling得到输出;由于输入的图片大小不一,所以这里我们使用的类似Spp Pooling,在Pooling的过程中需要计算Pooling后的结果对应到feature map上所占的范围,然后在那个范围中进行取max或者取average。
这是我个人的公共号:
讲解经典的深度学习方法~

Caffe ROI Pooling的源码解析
1. LayerSetUp
template <typename Dtype>
void ROIPoolingLayer::LayerSetUp(const vector 2. Reshape
template <typename Dtype>
void ROIPoolingLayer::Reshape(const vector 3. Forward
template <typename Dtype>
void ROIPoolingLayer::Forward_cpu(const vector(roi_height)
/ static_cast(pooled_height_);
const Dtype bin_size_w = static_cast(roi_width)
/ static_cast(pooled_width_);
//找到对应的roi的feature map,如果input data的batch size为1
//那么roi_batch_ind=0
const Dtype* batch_data = bottom_data + bottom[0]->offset(roi_batch_ind);
//pooling的过程是针对每一个channel的,所以需要循环遍历
for (int c = 0; c < channels_; ++c) {
//计算output的每一个值,所以需要遍历一遍output,然后求出所有值
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
// Compute pooling region for this output unit:
// start (included) = floor(ph * roi_height / pooled_height_)
// end (excluded) = ceil((ph + 1) * roi_height / pooled_height_)
// 计算output上的一点对应于input上面区域的大小[hstart, wstart, hend, wend]
int hstart = static_cast<int>(floor(static_cast(ph)
* bin_size_h));
int hend = static_cast<int>(ceil(static_cast(ph + 1)
* bin_size_h));
int wstart = static_cast<int>(floor(static_cast(pw)
* bin_size_w));
int wend = static_cast<int>(ceil(static_cast(pw + 1)
* bin_size_w));
//将映射后的区域平动到对应的位置[hstart, wstart, hend, wend]
hstart = min(max(hstart + roi_start_h, 0), height_);
hend = min(max(hend + roi_start_h, 0), height_);
wstart = min(max(wstart + roi_start_w, 0), width_);
wend = min(max(wend + roi_start_w, 0), width_);
//如果映射后的矩形框不符合
bool is_empty = (hend <= hstart) || (wend <= wstart);
//pool_index指的是此时计算的output的值对应于output的位置
const int pool_index = ph * pooled_width_ + pw;
//如果矩形不符合,此处output的值设为0,此处的对应于输入区域的最大值为-1
if (is_empty) {
top_data[pool_index] = 0;
argmax_data[pool_index] = -1;
}
//遍历output的值对应于input的区域块
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
// 对应于input上的位置
const int index = h * width_ + w;
//计算区域块的最大值,保存在output对应的位置上
//同时记录最大值的索引
if (batch_data[index] > top_data[pool_index]) {
top_data[pool_index] = batch_data[index];
argmax_data[pool_index] = index;
}
}
}
}
}
// Increment all data pointers by one channel
batch_data += bottom[0]->offset(0, 1);
top_data += top[0]->offset(0, 1);
argmax_data += max_idx_.offset(0, 1);
}
// Increment ROI data pointer
bottom_rois += bottom[1]->offset(1);
}
}