【计算机视觉】opencv靶标相机姿态解算2 根据四个特征点估计相机姿态 及 实时位姿估计与三维重建相机姿态
1 基本原理之如何解PNP问题
转载 基本原理之如何解PNP问题
http://www.cnblogs.com/singlex/p/pose_estimation_0.html
相机位姿估计0:基本原理之如何解PNP问题
关键词:相机位姿估计 PNP问题求解
用途:各种位姿估计
文章类型:原理
@Author:VShawn([email protected])
@Date:2016-11-18
@Lab: CvLab202@CSU
目录
- 《相机位姿估计0:基本原理之如何解PNP问题》
- 《相机位姿估计1:根据四个特征点估计相机姿态》
- 《相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试》
- 《相机位姿估计2:[应用]实时位姿估计与三维重建相机姿态》
- 《相机位姿估计3:根据两幅图像的位姿估计结果求某点的世界坐标》
今天给大家讲一讲相机位姿估计的基本原理,说实话我本人也没太了解,这里权当做抛砖引玉了。本来我这个博客是写应用型文章的,但虽然不做理论研究,但你要使用别人的方法来解决问题,那么也还是多多少少要对它的原理有点了解的。
关于PNP问题就是指通过世界中的N个特征点与图像成像中的N个像点,计算出其投影关系,从而获得相机或物体位姿的问题。
以下讨论中设相机位于点Oc,P1、P2、P3……为特征点。
Case1:当N=1时
当只有一个特征点P1,我们假设它就在图像的正中央,那么显然向量OcP1就是相机坐标系中的Z轴,此事相机永远是面对P1,于是相机可能的位置就是在以P1为球心的球面上,再一个就是球的半径也无法确定,于是有无数个解。
Case2:当N=2时
现在多了一个约束条件,显然OcP1P2形成一个三角形,由于P1、P2两点位置确定,三角形的变P1P2确定,再加上向量OcP1,OcP2从Oc点射线特征点的方向角也能确定,于是能够计算出OcP1的长度=r1,OcP2的长度=r2。于是这种情况下得到两个球:以P1为球心,半径为r1的球A;以P2为球心,半径为r2的球B。显然,相机位于球A,球B的相交处,依旧是无数个解。
Case3:当N=3时
与上述相似,这次又多了一个以P3为球心的球C,相机这次位于ABC三个球面的相交处,终于不再是无数个解了,这次应该会有4个解,其中一个就是我们需要的真解了。
Case4:当N大于3时
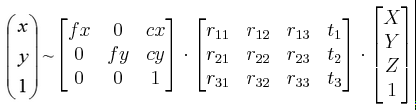
N=3时求出4组解,好像再加一个点就能解决这个问题了,事实上也几乎如此。说几乎是因为还有其他一些特殊情况,这些特殊情况就不再讨论了。N>3后,能够求出正解了,但为了一个正解就又要多加一个球D显然不够"环保",为了更快更节省计算机资源地解决问题,先用3个点计算出4组解获得四个旋转矩阵、平移矩阵。根据公式:

将第四个点的世界坐标代入公式,获得其在图像中的四个投影(一个解对应一个投影),取出其中投影误差最小的那个解,就是我们所需要的正解。
PNP问题的求解原理大致就是上面这样了,至于具体的数学方法还是请大家自己去查阅文献吧,本博客对这个问题的分析就到此为止了。接下来请看通过解PNP问题,求解相机位姿的应用。
2 根据四个特征点估计相机姿态
相机位姿估计1:根据四个特征点估计相机姿态
关键词:位姿估计 OpenCV::solvePnP
用途:各种位姿估计
文章类型:原理、流程、Demo示例
@Author:VShawn([email protected])
@Date:2016-11-18
@Lab: CvLab202@CSU
前言
本文通过迭代法解PNP问题,得到相机坐标系关于世界坐标系的旋转矩阵R与平移矩阵T后,根据之前的文章《根据相机旋转矩阵求解三个轴的旋转角》获得相机坐标系的三轴旋转角,实现了对相机位姿的估计。知道相机在哪后,我们就可以通过两张照片,计算出照片中某个点的高度,实现对环境的测量。
先看演示视频:
原理简介
相机位姿估计就是通过几个已知坐标的特征点,以及他们在相机照片中的成像,求解出相机位于坐标系内的坐标与旋转角度,其核心问题就在于对PNP问题的求解,这部分本文不再啰嗦,参见本人之前的博客文章《相机位姿估计0:基本原理之如何解PNP问题》。本文中对pnp问题的求解直接调用了OpenCV的库函数"solvePnP",其函数原型为:
bool solvePnP(InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess=false, int flags=ITERATIVE )
第一个输入objectPoints为特征点的世界坐标,坐标值需为float型,不能为double型,可以输入mat类型,也可以直接输入vector
第二个输入imagePoints为特征点在图像中的坐标,需要与前面的输入一一对应。同样可以输入mat类型,也可以直接输入vector
第三个输入cameraMatrix为相机内参数矩阵,大小为3×3,形式为:
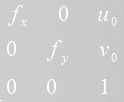
第四个输入distCoeffs输入为相机的畸变参数,为1×5的矩阵。
第五个rvec为输出矩阵,输出解得的旋转向量。
第六个tvec为输出平移向量。
第七个设置为true后似乎会对输出进行优化。
最后的输入参数有三个可选项:
CV_ITERATIVE,默认值,它通过迭代求出重投影误差最小的解作为问题的最优解。
CV_P3P则是使用非常经典的Gao的P3P问题求解算法。
CV_EPNP使用文章《EPnP: Efficient Perspective-n-Point Camera Pose Estimation》中的方法求解。
流程
1.从函数的原型看出函数需要相机的内参数与畸变参数,于是相机标定是必不可少的,通过OpenCV自带例程或者Matlab的相机标定工具箱都可以很方便地求出相机标定参数。
2.准备好四个特征点的世界坐标,存入Mat矩阵
|
1
2
3
4
5
|
vector
Points3D.push_back(cv::Point3f(0, 0, 0));
//P1 三维坐标的单位是毫米
Points3D.push_back(cv::Point3f(0, 200, 0));
//P2
Points3D.push_back(cv::Point3f(150, 0, 0));
//P3
Points3D.push_back(cv::Point3f(150, 200, 0));
//P4
|
3.准备好四个特征点在图像上的对应点坐标,这个坐标在实验中我是通过PhotoShop数出来的。注意,输入坐标的顺序一定要与之前输入世界坐标的顺序一致,就是说点与点要对应上,OpenCV的函数无法解决点与点匹配的问题(对应搜索问题)。
|
1
2
3
4
5
|
vector
Points2D.push_back(cv::Point2f(3062, 3073));
//P1 单位是像素
Points2D.push_back(cv::Point2f(3809, 3089));
//P2
Points2D.push_back(cv::Point2f(3035, 3208));
//P3
Points2D.push_back(cv::Point2f(3838, 3217));
//P4
|
4.创建输出变量,即旋转矩阵跟平移矩阵的变量。最后调用函数。
|
1
2
3
4
5
6
7
8
|
//初始化输出矩阵
cv::Mat rvec = cv::Mat::zeros(3, 1, CV_64FC1);
cv::Mat tvec = cv::Mat::zeros(3, 1, CV_64FC1);
//三种方法求解
solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec,
false
, CV_ITERATIVE);
//实测迭代法似乎只能用共面特征点求位置
//solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, CV_P3P); //Gao的方法可以使用任意四个特征点
//solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, CV_EPNP);
|
5将输出的旋转向量转变为旋转矩阵
|
1
2
3
4
|
//旋转向量变旋转矩阵
double
rm[9];
cv::Mat rotM(3, 3, CV_64FC1, rm);
Rodrigues(rvec, rotM);
|
6.最后根据《根据相机旋转矩阵求解三个轴的旋转角》一文求出相机的三个旋转角,根据《子坐标系C在父坐标系W中的旋转》求出相机在世界坐标系中的位置。
至此,我们就求出了相机的位姿。
实验
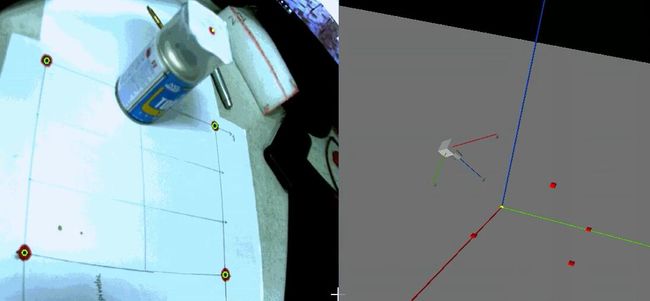
本人在实验中先后使用了两台相机做测试,一台是畸变较小的sony a6000微单+35mm定焦镜头,另一台是畸变较重的130w的工业相机+6mm定焦广角镜头,实验中两台相机都得到了正确的位姿结果,此处为了方便只用α6000微单做演示说明。

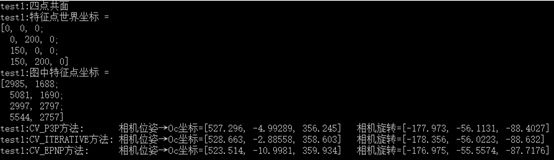
如上图所示,四个特征点P1-P4的世界坐标与像素坐标都已在图中标明,P5用于重投影验证位姿解是否正确。
相机实际位姿大约为:



粗略读出卷尺读数,得到相机的世界坐标大约为(520,0,330)。细心的读者应该发现了,上面几张图的特征点不一样了,其实是我中途重新做了一张特征点图,重新安放实验装置的时候已经尽量按照(520,0,330)这个坐标去安放了,但误差肯定是不可避免的。
把参数输入例程中,得到结果,计算出相机的世界坐标:

也就是(528.6,-2.89,358.6),跟实际情况还是差不多的。
同时还得到了x y z轴的三个旋转角

自己动手转一转相机,发现也是对的。
对P5点重投影,投影公式为:
结果为:
![]()
误差在10pix以内,结果也是正确的,于是验证完毕。
P.S.经本人测试发现,solvePnP提供的三种算法都能对相机位姿进行估计,虽然三者直接解出的结果略有不同,但都在误差范围之内。其中solvePnP的默认方法迭代法,似乎只能使用共面的四个特征点求位姿,一旦有一个点不共面,解出的结果就会不对。
例程
最后给出例程,例程基于VS2013开发,使用的是OpenCV2.4.X,大家运行前需要将opencv的路径重新配置成自己电脑上的,不懂的话参考我的博客《OpenCV2+入门系列(一):OpenCV2.4.9的安装与测试》。例程中提供两张照片,其中DSC03323就是"实验"中所用图片,例程在计算完成后,会在D盘根目录下生成两个txt,分别存储:相机在世界坐标系的坐标、相机的三个旋转角。
下载地址:
CSDN:http://download.csdn.net/detail/wx2650/9688155
GIT:https://github.com/vshawn/Shawn_pose_estimation_by_opencv
3 OpenCV:solvePnP二次封装与性能测试
相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP
文章类型:方法封装、测试
@Author:VShawn([email protected])
@Date:2016-11-27
@Lab: CvLab202@CSU
前言
今天给大家带来的是一篇关于程序功能、性能测试的文章,读过《相机位姿估计1:根据四个特征点估计相机姿态》一文的同学应该会发现,直接使用OpenCV的solvePnP来估计相机位姿,在程序调用上相当麻烦,从一开始的参数设定到最后将计算出的矩阵转化为相机的位姿参数,需要花费近两百行代码。因此为了更方便地调用程序,今天我就给大家带来一个我自己对solvePnP的封装类PNPSolver,顺便将OpenCV自带的三种求解方法测试一遍。
类的封装
封装的思路我就不写了,由于博客更新速度赶不上我写程序的速度,现在发上来的类已经修改过好几次了,思路也换了几次。不过大的方向没变,目的就是只需要输入参数,输入坐标点后直接可以得到相机在世界坐标系的坐标。
类的调用顺序:
1.初始化PNPSolver类;
2.调用SetCameraMatrix(),SetDistortionCoefficients()设置好相机内参数与镜头畸变参数;
3.向Points3D,Points2D中添加一一对应的特征点对;
4.调用Solve()方法运行计算;
5.从属性Theta_C2W中提取旋转角,从Position_OcInW中提取出相机在世界坐标系下的坐标。
以下是类体:
PNPSolver.h
PNPSolver.cpp
一个典型的调用示例
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
|
//初始化PNPSolver类
PNPSolver p4psolver;
//初始化相机参数
p4psolver.SetCameraMatrix(fx, fy, u0, v0);
//设置畸变参数
p4psolver.SetDistortionCoefficients(k1, k2, p1, p2, k3);
//设置特征点的世界坐标
p4psolver.Points3D.push_back(cv::Point3f(0, 0, 0));
//P1三维坐标的单位是毫米
p4psolver.Points3D.push_back(cv::Point3f(0, 200, 0));
//P2
p4psolver.Points3D.push_back(cv::Point3f(150, 0, 0));
//P3
//p4psolver.Points3D.push_back(cv::Point3f(150, 200, 0)); //P4
p4psolver.Points3D.push_back(cv::Point3f(0, 100, 105));
//P5
cout <<
"test2:特征点世界坐标 = "
<< endl << p4psolver.Points3D << endl;
//设置特征点的图像坐标
p4psolver.Points2D.push_back(cv::Point2f(2985, 1688));
//P1
p4psolver.Points2D.push_back(cv::Point2f(5081, 1690));
//P2
p4psolver.Points2D.push_back(cv::Point2f(2997, 2797));
//P3
//p4psolver.Points2D.push_back(cv::Point2f(5544, 2757)); //P4
p4psolver.Points2D.push_back(cv::Point2f(4148, 673));
//P5
cout <<
"test2:图中特征点坐标 = "
<< endl << p4psolver.Points2D << endl;
if
(p4psolver.Solve(PNPSolver::METHOD::CV_P3P) == 0)
cout <<
"test2:CV_P3P方法: 相机位姿→"
<<
"Oc坐标="
<< p4psolver.Position_OcInW <<
" 相机旋转="
<< p4psolver.Theta_W2C << endl;
if
(p4psolver.Solve(PNPSolver::METHOD::CV_ITERATIVE) == 0)
cout <<
"test2:CV_ITERATIVE方法: 相机位姿→"
<<
"Oc坐标="
<< p4psolver.Position_OcInW <<
" 相机旋转="
<< p4psolver.Theta_W2C << endl;
if
(p4psolver.Solve(PNPSolver::METHOD::CV_EPNP) == 0)
cout <<
"test2:CV_EPNP方法: 相机位姿→"
<<
"Oc坐标="
<< p4psolver.Position_OcInW <<
" 相机旋转="
<< p4psolver.Theta_W2C << endl;
|
方法测试
OpenCV提供了三种方法进行PNP计算,三种方法具体怎么计算的就请各位自己查询opencv documentation以及相关的论文了,我看了个大概然后结合自己实际的测试情况给出一个结论,不一定正确,仅供参考:
| 方法名 |
说明 |
测试结论 |
| CV_P3P |
这个方法使用非常经典的Gao方法解P3P问题,求出4组可能的解,再通过对第四个点的重投影,返回重投影误差最小的点。 论文《Complete Solution Classification for the Perspective-Three-Point Problem》 |
可以使用任意4个特征点求解,不要共面,特征点数量不为4时报错 |
| CV_ITERATIVE |
该方法基于Levenberg-Marquardt optimization迭代求解PNP问题,实质是迭代求出重投影误差最小的解,这个解显然不一定是正解。 实测该方法只有用4个共面的特征点时才能求出正确的解,使用5个特征点或4点非共面的特征点都得不到正确的位姿。
|
只能用4个共面的特征点来解位姿 |
| CV_EPNP |
该方法使用EfficientPNP方法求解问题,具体怎么做的当时网速不好我没下载到论文,后面又懒得去看了。 论文《EPnP: Efficient Perspective-n-Point Camera Pose Estimation》 |
对于N个特征点,只要N>3就能够求出正解。 |
测试截图:
1.使用四个共面的特征点,显然三种方法都能得到正解,但相互之间略有误差。
2使用四个非共面的特征点,CV_ITERATIVE方法解错了。

3.使用5个特征点求解,只有CV_EPNP能够用

性能测试
最后对三种方法的性能进行测试,通过对test1重复执行1000次获得算法的运行时间,从结果可以看出迭代法显然是最慢的,Gao的P3P+重投影法用时最少,EPNP法其次。

总结
综合以上的测试,推荐使用CV_P3P来解决实际问题,该方法对于有四个特征点的情况限制少、运算速度快。当特征点数大于4时,可以取多组4特征点计算出结果再求平均值,或者为了简单点就直接使用CV_EPNP法。
不推荐使用CV_ITERATIVE方法。
4 实时位姿估计与三维重建相机姿态
前言
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。

处理流程
-
首先初始化工业相机,采集到实时图像,使用imshow显示图片。
-
在实时的相机采图中,依次选取P1、P2、P3、P4(在前文《相机位姿估计1:根据共面四点估计相机姿态》中有提及),一定要按顺序点,否则无法获得正确位姿。选取完成后立即对该点进行追踪。
-
当跟踪的特征点数量达到4个时,程序开始调用PNPSolver类估计相机位姿。
-
将得到的位姿信息写入txt,位于D盘根目录(这就是上一篇文章中为什么要写文件的原因)。
-
Labview程序运行后不断读取txt,将读到的位姿数据应用到3D中,绘制出正确的三维场景。(这里两个进程通过txt通讯效率很低,但我偷懒了,没有再去编写更好的程序)
用流程图来表示就是:
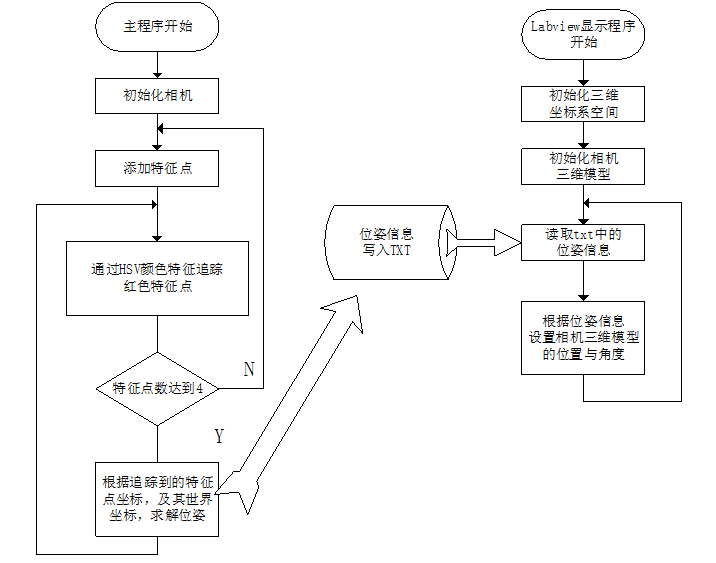
过程非常简单,C++程序用来计算位姿,labview程序用于显示。
(对于不懂labview的读者:也可以通过OpenGL来实现显示部分)
特征点跟踪方法
为了偷懒省事,这里的特征点跟踪直接使用了最简单的跟踪颜色的方法。我做的标志图是这样的:
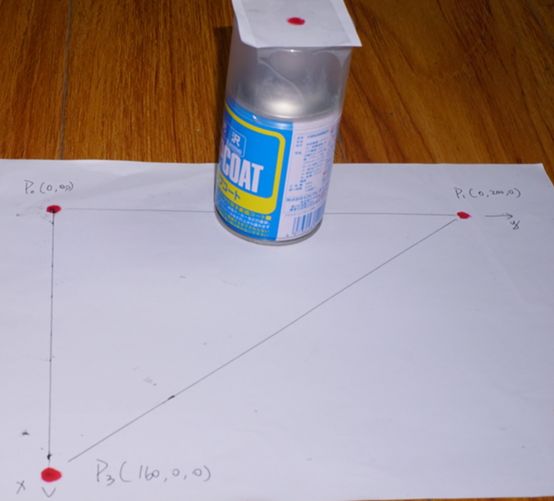
每个特征点都是红色马克笔涂出的红点。
在实际操作中用户首先在显示界面中按照顺序(程序中点的世界坐标输入顺序)点击特征点,得到特征点的初始位置。根据初始位置,在其附近选取ROI,将BGR图像转为HSV图像进行颜色分割,针对其H通道进行二值化,将红色区域置为255,得到二值图像。在二值图像中查找连通域,并计算出连通域的重心G的位置,将G的坐标作为本次跟踪结果返回,并作为下一次跟踪的起点。
效果如下图,图中绿色的圈是以重心G为圆心绘制的。

函数如下:
位姿估计
当用户点击了四个特征点后,程序开始运行位姿估计部分。位姿具体的过程不再叙述,请参考前面的博文:
《相机位姿估计1:根据四个特征点估计相机姿态》
《相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试》
三维显示
位姿估计完成后,会输出两个txt用于记录相机当前的位姿。

Labview程序就是读取这两个txt的信息,进而显示出三维空间。labview程序的编程过程比较难叙述,思路便是首先建立世界坐标系,然后在世界坐标系中创建一个三维物体作为相机的三维模型。然后根据txt中的信息,设置这个模型所在的位置(也就是三维坐标),再设置该模型的三个自旋角,完成三维绘制。
上述流程可以运行项目文件夹中的:
~\用LabView重建相机位置\世界-手动调整参数设置相机位姿.vi
来手动设置参数,体验绘图的流程。
对该部分感兴趣的人可以参考文档:
http://zone.ni.com/reference/zhs-XX/help/371361J-0118/lvhowto/create_3d_scene/
效果演示
这演示以前也有放出来过,就是实时跟踪特征点,再在右边重建相机姿态。
程序下载
最后给出例程,例程C++部分基于VS2013开发,使用的是OpenCV2.4.X,三维重建部分使用Labview2012开发。OpenCV配置参考我的博客《OpenCV2+入门系列(一):OpenCV2.4.9的安装与测试》,Labview则是直接安装好就行。

例程下载后,需要将图像采集部分修改为你的相机驱动,然后修改相机参数、畸变参数就能够使用了。
地址:
C++程序:Github
LabView程序:Github
程序下载地址:Github
作者:VShawn
出处:http://www.cnblogs.com/singlex/
本文版权归作者所有,欢迎转载,但未经博客作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。