【OpenCV】摄像机标定+畸变校正
摄像机标定
本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行校正后的显示。
首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解:
http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
对于摄像机我们所关心的主要参数为摄像机内参,以及几个畸变系数。上面的连接中后半部分也给了如何标定,然而OpenCV自带的标定程序稍显繁琐。因而在本文中我主推使用MATLAB的工具箱。下面让我们开始标定过程。
标定板
标定的最开始阶段最需要的肯定是标定板。两种方法,直接从opencv官网上能下载到:
http://docs.opencv.org/2.4/_downloads/pattern.png
方法二:逼格满满(MATLAB)
J = (checkerboard(300,4,5)>0.5);
figure, imshow(J);
采集数据
那么有了棋盘格之后自然是需要进行照片了。不多说,直接上程序。按q键即可保存图像,尽量把镜头的各个角度都覆盖好。
#include "opencv2/opencv.hpp"
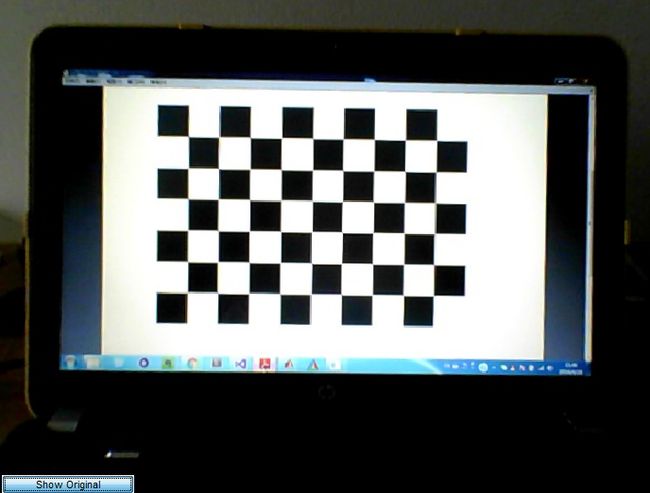
#include 保存大约15到20张即可。大家可以看到我的方法,直接对着实验室的屏幕拍摄的。这个阶段有个注意事项就是测量好屏幕上每个方格的大小,这个标定的时候会用到。
进行标定
直接而在MATLAB的Command Window里面输入cameraCalibrator即可调用标定应用。


首先先把之前照好的图像添加进去,这是出现:

这就是之前让你记录的标定板中每个方格的大小。
输入无误后就涉及到最关键的一步了(MATLAB的这个实在太方便了,都是傻瓜式操作),选择参数。
为什么说他关键呢,因为如果你仔细阅读了OpenCV的说明之后你会大概明白畸变参数,总共有五个,径向畸变3个(k1,k2,k3)和切向畸变2个(p1,p2)。
径向畸变:
![]()
切向畸变:

以及在OpenCV中的畸变系数的排列(这点一定要注意k1,k2,p1,p2,k3),千万不要以为k是连着的。
![]()
并且通过实验表明,三个参数的时候由于k3所对应的非线性较为剧烈。估计的不好,容易产生极大的扭曲,所以我们在MATLAB中选择使用两参数,并且选择错切和桶形畸变。

点击开始后等待一段时间即可完成标定。并且MATLAB给出的可视化还是很不错的,可以对比校正前后的样子。

点击show Undistorted即可看到无畸变的图像。
到这为止,你已经完成了标定过程。选择导出参数,即可把参数进行保存。

保存后可以退出标定应用,在MATLAB主界面中将保存的Mat文件打开。
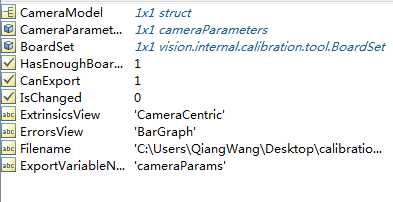
第二行就是参数
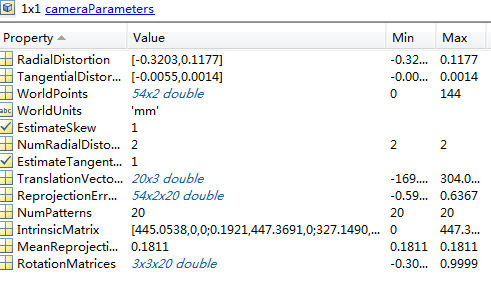
里面的RadialDistortion对应k1,k2,k3设置为0了。
TangentialDistortion对应p1,p2。
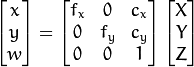
IntrinsicMatrix对应内参,注意这个和OpenCV中是转置的关系,注意不要搞错。

对应
OpenCV中查看标定的结果
直接上代码。
#include "opencv2/opencv.hpp"
#include 相信此时你的镜头的畸变也得到了修复。

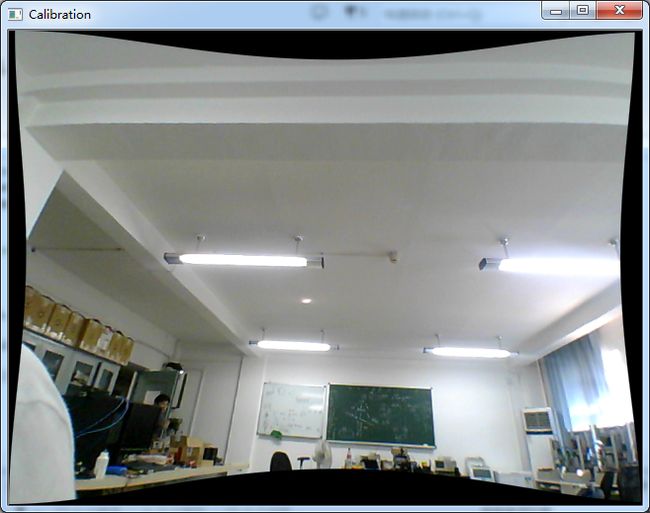
还有就是之前讨论的为什么选2系数而不是3系数。因为。。。。。。。
下面是三系数的修正结果,惨不忍睹啊。
