容器化RDS——计算存储分离架构下的“Split-Brain”
2018 年 1 月 19 号参加了阿里巴巴双十一数据库技术峰会,见到了好多老同事(各位研究员、资深专家),也了解到业界最新的数据库技术发展趋势:
数据库容器化作为下一代数据库基础架构
基于编排架构管理容器化数据库
采用计算存储分离架构
这和我们在私有 RDS 上的技术选型不谋而合,尤其是计算存储分离架构。

在我们看来,其最大优势在于:
计算资源 / 存储资源独立扩展,架构更清晰,部署更容易。
将有状态的数据下沉到存储层,Scheduler 调度时,无需感知计算节点的存储介质,只需调度到满足计算资源要求的 Node,数据库实例启动时,只需在分布式文件系统挂载 mapping volume 即可,可以显著的提高数据库实例的部署密度和计算资源利用率。
以阿里巴巴为例,考虑到今时今日它的规模,如果能够实现数据库服务的离线(ODPS)/ 在线集群的混合部署,意义极其重大。关键问题在于,离线(ODPS)计算和在线计算对实时性要求不同,硬件配置也不同,尤其是本地存储介质:
离线(ODPS)以机械磁盘为主
在线以 SSD / Flash 为主
如果采用本地存储作为数据库实例的存储介质,试想一下,一个 Storage Qos 要求是 Flash 的数据库实例无法调度到离线计算集群,哪怕离线计算集群 CPU、Memory 有大量空闲。
计算存储分离为实现离线(ODPS)/在线集群的混合部署提供了可能。
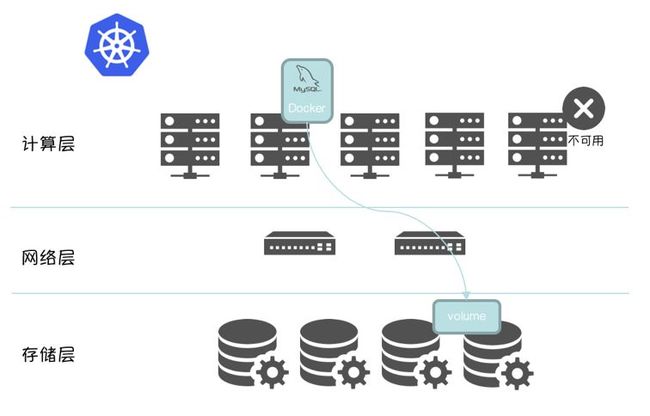
结合 Kubernetes、Docker 和 MySQL,进一步细化架构图,如下图所示:

同时,这套架构也带给我们更加简单、通用、高效的 High Availability 方案。当集群中某个 Node 不可用后,借助 Kubernetes 的原生组件Node Controller,Scheduler和原生API Statefulset即可将数据库实例调度到其他可用节点,以实现数据库实例的高可用。
一切是多么的美好,是不是可以得到这个结论:
借助 Kubernetes 的原生组件 Node Controller、Scheduler 和原生 API Statefulset,上计算存储分离架构,将成熟的分布式文件系统集成到 Kubernetes 存储系统,就能提供私有 RDS 服务。
之前我们也是这么想的,直到遇到“Split-Brain”问题(也即是本文的主题)。
回到上面的 High Availability 方案。
当集群中某个 Node 不可用后,借助 Kubernetes 的原生组件Node Controller、Scheduler和原生API Statefulset即可将数据库实例调度到其他可用节点,以实现数据库实例的高可用。
判定 Node 不可用将是后续触发 Failover 动作的关键。
所以这里需要对节点状态的判定机制稍作展开:
Kubelet 借助 API Server 定期(node-status-update-frequency)更新 etcd 中对应节点的心跳信息。
Controller Manager 中的 Node Controller 组件定期(node-monitor-period)轮询 ETCD 中节点的心跳信息。
如果在周期(node-monitor-grace-period)内,心跳更新丢失,该节点标记为Unknown(ConditionUnknown)。
如果在周期(pod-eviction-timeout)内,心跳更新持续丢失,Node Controller 将会触发集群层面的驱逐机制。
Scheduler将Unknown节点上的所有数据库实例调度到其他健康(Ready)节点。
访问架构图如下所示:

补充一句,助 ETCD 集群的高可用强一致,以保证 Kubernetes 集群元信息的一致性。
ETCD 基于 Raft 算法实现。
Raft 算法是一种基于消息传递(state machine replicated)且具有高度容错(fault tolerance)特性的一致性算法(consensus algorithm)。
Raft 是大名鼎鼎的 Paxos 的简化版本。
如果对于 Raft 算法的实现有兴趣,可以看看 https://github.com/goraft/raft。
所有感兴趣一致性算法的同学,都值得花精力学习。基于 goraft/raft,我实现了Network Partition Failures/Recovery TestCase,收获不小。
看上去合理的机制会给我们带来两个问题。
问题一:无法判定节点真实状态
心跳更新是判断节点是否可用的依据,但是,心跳更新丢失是无法判定节点真实状态的(Kubernetes 中将节点标记为 ConditionUnknown 也说明了这点)。
Node 可能仅仅是网络问题、CPU 繁忙、“假死”、Kubelet bug 等原因导致心跳更新丢失,但节点上的 数据库实例还在运行中。
问题二:缺乏有效的 Fence 机制
在这个情况下,借助 Kubernetes 的原生组件Node Controller、Scheduler和原生 API Statefulset 实现的 Failover,将数据库实例从 Unknown 节点驱逐到可用节点,但对原 Unknown 节点不做任何操作。
这种“软驱逐”,将会导致新旧两个数据库实例同时访问同一份数据文件。

发生”Split-Brain”,导致 Data Corruption。数据丢失,损失无法弥补。
所以,必须借助 WOQU RDS Operator 提供的 fence 机制,才能保障数据文件的安全。
下面是枯燥的故障复现,通过日志和代码分析驱逐的工作机制,总结“Split-Brain”整个过程。
测试过程:
使用 Statefulset 创建 MySQL 单实例 gxr-oracle-statefulset(这是一个 Oracle DBA 取的名字,请原谅他)
Scheduler 将 MySQL 单实例调度到集群中的节点 “k8s-node3”
通过 sysbench 对该实例制造极高的负载,“k8s-node3” load 飙升,导致“k8s-node3”上的 Kubelet 无法跟 API Server 通讯,并开始报错
Node Controller 启动驱逐
Statefulset 发起重建
Scheduler 将 MySQL 实例调度到“k8s-node1”上
新旧 MySQL 实例访问同一个 Volume
数据文件被写坏,新旧 MySQL 实例都报错,并无法启动
测试参数:
kube-controller-manager 启动参数:

kubelet 启动参数:

基于日志,整个事件流如下:
时间点 December 1st 2017,10:18:05.000(最后一次更新成功应该是 10:17:42.000):
节点(k8s-node3)启动数据库压力测试,以模拟该节点“假死”,kubelet 跟 API Server 出现心跳丢失。

kubelet 日志报错,无法通过 API Server 更新 k8s-node3 状态。
Kubelet 细节如下:
通过 API Server 更新集群信息:
if kl.kubeClient != nil {
// Start syncing node status immediately, this may set up things the runtime needs to run.
go wait.Until(kl.syncNodeStatus, kl.nodeStatusUpdateFrequency, wait.NeverStop)
}
定期(nodeStatusUpdateFrequency)更新对应节点状态:
nodeStatusUpdateFrequency 默认时间为 10 秒,测试时设置的是 8s。
obj.NodeStatusUpdateFrequency = metav1.Duration{Duration: 10 * time.Second}
更新如下信息:
func (kl *Kubelet) defaultNodeStatusFuncs() []func(*v1.Node) error {
// initial set of node status update handlers, can be modified by Option's
withoutError := func(f func(*v1.Node)) func(*v1.Node) error {
return func(n *v1.Node) error {
f(n)
return nil
}
}
return []func(*v1.Node) error{
kl.setNodeAddress,
withoutError(kl.setNodeStatusInfo),
withoutError(kl.setNodeOODCondition),
withoutError(kl.setNodeMemoryPressureCondition),
withoutError(kl.setNodeDiskPressureCondition),
withoutError(kl.setNodeReadyCondition),
withoutError(kl.setNodeVolumesInUseStatus),
withoutError(kl.recordNodeSchedulableEvent),
}
}
通过 kubectl 可以获得节点的信息:

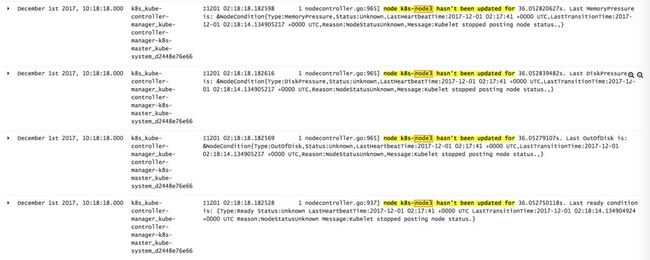
时间点 December 1st 2017, 10:18:14.000:
NodeController 发现 k8s-node3 的状态有32s 没有发生更新。
ready / outofdisk / diskpressure / memorypressue condition




将该节点状态更新为 UNKNOWN:

每隔 NodeMonitorPeriod 继续节点状态是否有更新:
定期(NodeMonitorPeriod)查看一次节点状态:
// Incorporate the results of node status pushed from kubelet to master.
go wait.Until(func() {
if err := nc.monitorNodeStatus(); err != nil {
glog.Errorf("Error monitoring node status: %v", err)
}
}, nc.nodeMonitorPeriod, wait.NeverStop)
NodeMonitorPeriod 默认 5秒,测试时4s。
NodeMonitorPeriod: metav1.Duration{Duration: 5 * time.Second},
当超过 NodeMonitorGracePeriod 时间后,节点状态没有更新将节点状态设置成 unknown:
if nc.now().After(savedNodeStatus.probeTimestamp.Add(gracePeriod)) {
// NodeReady condition was last set longer ago than gracePeriod, so update it to Unknown
// (regardless of its current value) in the master.
if currentReadyCondition == nil {
glog.V(2).Infof("node %v is never updated by kubelet", node.Name)
node.Status.Conditions = append(node.Status.Conditions, v1.NodeCondition{
Type: v1.NodeReady,
Status: v1.ConditionUnknown,
Reason: "NodeStatusNeverUpdated",
Message: fmt.Sprintf("Kubelet never posted node status."),
LastHeartbeatTime: node.CreationTimestamp,
LastTransitionTime: nc.now(),
})
} else {
glog.V(4).Infof("node %v hasn't been updated for %+v. Last ready condition is: %+v",
node.Name, nc.now().Time.Sub(savedNodeStatus.probeTimestamp.Time), observedReadyCondition)
if observedReadyCondition.Status != v1.ConditionUnknown {
currentReadyCondition.Status = v1.ConditionUnknown
currentReadyCondition.Reason = "NodeStatusUnknown"
currentReadyCondition.Message = "Kubelet stopped posting node status."
// LastProbeTime is the last time we heard from kubelet.
currentReadyCondition.LastHeartbeatTime = observedReadyCondition.LastHeartbeatTime
currentReadyCondition.LastTransitionTime = nc.now()
}
}
时间点 December 1st 2017,10:19:42.000:
刚好过去 podEvictionTimeout,将该节点添加到驱逐队列中。

在 podEvictionTimeout 后,认为该节点上 Pods 需要开始驱逐:
if observedReadyCondition.Status == v1.ConditionUnknown {
if nc.useTaintBasedEvictions {
// We want to update the taint straight away if Node is already tainted with the UnreachableTaint
if taintutils.TaintExists(node.Spec.Taints, NotReadyTaintTemplate) {
taintToAdd := *UnreachableTaintTemplate
if !util.SwapNodeControllerTaint(nc.kubeClient, []*v1.Taint{&taintToAdd}, []*v1.Taint{NotReadyTaintTemplate}, node) {
glog.Errorf("Failed to instantly swap UnreachableTaint to NotReadyTaint. Will try again in the next cycle.")
}
} else if nc.markNodeForTainting(node) {
glog.V(2).Infof("Node %v is unresponsive as of %v. Adding it to the Taint queue.",
node.Name,
decisionTimestamp,
)
}
} else {
if decisionTimestamp.After(nc.nodeStatusMap[node.Name].probeTimestamp.Add(nc.podEvictionTimeout)) {
if nc.evictPods(node) {
glog.V(2).Infof("Node is unresponsive. Adding Pods on Node %s to eviction queues: %v is later than %v + %v",
node.Name,
decisionTimestamp,
nc.nodeStatusMap[node.Name].readyTransitionTimestamp,
nc.podEvictionTimeout-gracePeriod,
)
}
}
}
}
放到驱逐数组中:
// evictPods queues an eviction for the provided node name, and returns false if the node is already
// queued for eviction.
func (nc *Controller) evictPods(node *v1.Node) bool {
nc.evictorLock.Lock()
defer nc.evictorLock.Unlock()
return nc.zonePodEvictor[utilnode.GetZoneKey(node)].Add(node.Name, string(node.UID))
}
时间点 December 1st 2017,10:19:42.000:
开始驱逐:



驱逐 Goroutine:
if nc.useTaintBasedEvictions {
// Handling taint based evictions. Because we don't want a dedicated logic in TaintManager for NC-originated
// taints and we normally don't rate limit evictions caused by taints, we need to rate limit adding taints.
go wait.Until(nc.doNoExecuteTaintingPass, scheduler.NodeEvictionPeriod, wait.NeverStop)
} else {
// Managing eviction of nodes:
// When we delete pods off a node, if the node was not empty at the time we then
// queue an eviction watcher. If we hit an error, retry deletion.
go wait.Until(nc.doEvictionPass, scheduler.NodeEvictionPeriod, wait.NeverStop)
}
通过删除 Pods 的方式驱逐:
func (nc *Controller) doEvictionPass() {
nc.evictorLock.Lock()
defer nc.evictorLock.Unlock()
for k := range nc.zonePodEvictor {
// Function should return 'false' and a time after which it should be retried, or 'true' if it shouldn't (it succeeded).
nc.zonePodEvictor[k].Try(func(value scheduler.TimedValue) (bool, time.Duration) {
node, err := nc.nodeLister.Get(value.Value)
if apierrors.IsNotFound(err) {
glog.Warningf("Node %v no longer present in nodeLister!", value.Value)
} else if err != nil {
glog.Warningf("Failed to get Node %v from the nodeLister: %v", value.Value, err)
} else {
zone := utilnode.GetZoneKey(node)
evictionsNumber.WithLabelValues(zone).Inc()
}
nodeUID, _ := value.UID.(string)
remaining, err := util.DeletePods(nc.kubeClient, nc.recorder, value.Value, nodeUID, nc.daemonSetStore)
if err != nil {
utilruntime.HandleError(fmt.Errorf("unable to evict node %q: %v", value.Value, err))
return false, 0
}
if remaining {
glog.Infof("Pods awaiting deletion due to Controller eviction")
}
return true, 0
})
}
}
时间点 December 1st 2017,10:19:42.000:
StatefulSet controller 发现 default/gxr1-oracle-statefulset 状态异常。

时间点 December 1st 2017,10:19:42.000:
Scheduler 将 Pod 调度到 k8s-node1:

这样旧的 MySQL 实例在 k8s-node3 上,Kubernetes 又将新的实例调度到 k8s-node1。
两个数据库实例写同一份数据文件,导致 data corruption,两个节点都无法启动。
老实例启动报错,日志如下:
2017-12-01 10:19:47 5628 [Note] mysqld (mysqld 5.7.19-log) starting as process 963 ...
2017-12-01 10:19:47 5628 [Note] InnoDB: PUNCH HOLE support available
2017-12-01 10:19:47 5628 [Note] InnoDB: Mutexes and rw_locks use GCC atomic builtins
2017-12-01 10:19:47 5628 [Note] InnoDB: Uses event mutexes
2017-12-01 10:19:47 5628 [Note] InnoDB: GCC builtin __atomic_thread_fence() is used for memory barrier
2017-12-01 10:19:47 5628 [Note] InnoDB: Compressed tables use zlib 1.2.3
2017-12-01 10:19:47 5628 [Note] InnoDB: Using Linux native AIO
2017-12-01 10:19:47 5628 [Note] InnoDB: Number of pools: 1
2017-12-01 10:19:47 5628 [Note] InnoDB: Using CPU crc32 instructions
2017-12-01 10:19:47 5628 [Note] InnoDB: Initializing buffer pool, total size = 3.25G, instances = 2, chunk size = 128M
2017-12-01 10:19:47 5628 [Note] InnoDB: Completed initialization of buffer pool
2017-12-01 10:19:47 5628 [Note] InnoDB: If the mysqld execution user is authorized, page cleaner thread priority can be changed. See the man page of setpriority().
2017-12-01 10:19:47 5628 [Note] InnoDB: Highest supported file format is Barracuda.
2017-12-01 10:19:47 5628 [Note] InnoDB: Log scan progressed past the checkpoint lsn 406822323
2017-12-01 10:19:47 5628 [Note] InnoDB: Doing recovery: scanned up to log sequence number 406823190
2017-12-01 10:19:47 5628 [Note] InnoDB: Database was not shutdown normally!
2017-12-01 10:19:47 5628 [Note] InnoDB: Starting crash recovery.
2017-12-01 10:19:47 5669 [Note] InnoDB: Starting an apply batch of log records to the database...
InnoDB: Progress in percent: 89 90 91 92 93 94 95 96 97 98 99
2017-12-01 10:19:47 5669 [Note] InnoDB: Apply batch completed
2017-12-01 10:19:47 5669 [Note] InnoDB: Last MySQL binlog file position 0 428730, file name mysql-bin.000004
2017-12-01 10:19:47 5669 [Note] InnoDB: Removed temporary tablespace data file: "ibtmp1"
2017-12-01 10:19:47 5669 [Note] InnoDB: Creating shared tablespace for temporary tables
2017-12-01 10:19:47 5669 [Note] InnoDB: Setting file './ibtmp1' size to 12 MB. Physically writing the file full; Please wait ...
2017-12-01 10:19:47 5669 [Note] InnoDB: File './ibtmp1' size is now 12 MB.
2017-12-01 10:19:47 5669 [Note] InnoDB: 96 redo rollback segment(s) found. 96 redo rollback segment(s) are active.
2017-12-01 10:19:47 5669 [Note] InnoDB: 32 non-redo rollback segment(s) are active.
2017-12-01 10:19:47 5669 [Note] InnoDB: Waiting for purge to start
2017-12-01 10:19:47 0x7fcb08928700 InnoDB: Assertion failure in thread 140509998909184 in file trx0purge.cc line 168
InnoDB: Failing assertion: purge_sys->iter.trx_no <= purge_sys->rseg->last_trx_no
InnoDB: We intentionally generate a memory trap.
InnoDB: Submit a detailed bug report to http://bugs.mysql.com.
InnoDB: If you get repeated assertion failures or crashes, even
InnoDB: immediately after the mysqld startup, there may be
InnoDB: corruption in the InnoDB tablespace. Please refer to
InnoDB: http://dev.mysql.com/doc/refman/5.7/en/forcing-innodb-recovery.html
InnoDB: about forcing recovery.
10:19:47 5669 - mysqld got signal 6 ;
以上问题通过 WOQU RDS Operator 提供的 Fence 机制已经得到有效解决。
Kubernetes 使我们站在巨人的肩膀上,从各大互联网公司的技术发展看,将编排和容器技术应用到持久化 workload 也是显见的趋势之一。
但是,借用 Portworx CEO 的 Murli Thirumale 对 Kubenretes 的预测:Kubernetes相当复杂,Kubernetes被拥趸们冠以“优雅”的头衔,但优雅并不意味着简单。弦论是优雅的,但是理解它需要付出极大的努力。Kubernetes一样,使用Kubernetes构建和运行应用程序并不是一个简单的命题。 Kubernetes is complicated. Kubernetes is often described as elegant by enthusiasts. But its elegance doesn’t make it simple. String theory is elegant, but understanding it with anything except the most imprecise analogies takes a lot of effort. Kubernetes is the same. Using Kubernetes to build and run an application is not a straightforward proposition. 革命尚未成功,同志任需努力!
作者:熊中哲,沃趣科技联合创始人/产品研发中心总监。原阿里巴巴高级数据库专家,多年大型制造业及电子商务数据库运维经验,曾参与阿里云RDS运维自动化研发。
基于Kubernetes的DevOps实践培训
![]()

本周四正式开课,点击阅读原文链接即可报名。