TensorFlow入门之CIFAR-10图像识别模型实战教程
文章目录
- 下载TensorFlow Models库
- CIFAR-10数据集
- CIFAR-10数据集介绍
- 下载CIFAR-10数据
- 开始训练模型
- 导入包和定义参数
- 定义初始化weight的函数
- 下载数据集并解压展开到默认位置
- 数据增强和输入
- 定义神经网络
- 计算损失函数loss
- 创建Sessionc,初始化参数
- 迭代训练
- 在测试集上测评准确率
- 全部代码
- 项目代码
- 参考资料
下载TensorFlow Models库
下载Tensorflow Models库,以便使用其中提供的CIFAR-10数据的类。
注意:在git中进行操作,没有安装git的先安装git。
# 下载Tensorflow Models库,可能需要较长时间,耐心等待,切忌中途结束否则重新下载比较麻烦
git clone https://github.com/tensorflow/models.git
# 下载好Tensorflow Models库后进cifar10所在位置
cd models/tutorials/image/cifar10
TensorFlow官方示例的CIFAR-10代码文件
| 文件 | 用途 |
|---|---|
| cifar10.py | 建立CIFAR-10预测模型 |
| cifar10_input.py | 在TensorFlow中读入CIFAR-10训练图片 |
| cifar10_input_test.py | cifar10_input的测试用例文件 |
| cifar10_train.py | 使用单个GPU或CPU训练模型 |
| cifar10_train_multi_gpu.py | 使用多个GPU训练模型 |
| cifar10_eval.py | 在测试集上测试模型的性能 |
CIFAR-10数据集
CIFAR-10数据集介绍
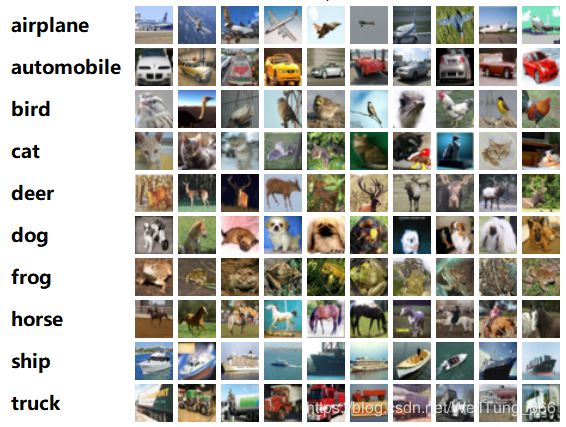
CIFAR-10是一个用于识别普适物体的小型数据据,它一共包含10个类别的RGB彩色图片:飞机( airplane )、汽车( automobile )、鸟类( bird )、猫( cat )、鹿( deer )、狗( dog )、蛙类( frog )、马( horse )、船( ship )和卡车( truck )。图片的尺寸为 32×32 ,数据集中一共有 50000 张训练图片和 10000 张测试图片。 如下图示:
下载CIFAR-10数据
CIFAR-10数据集可以自己下载也可以直接从Tensorflow Models库中自动下载。
下载地址:http://www.cs.toronto.edu/~kriz/cifar.html
点击进入下载地址,选择python版本进行下载。
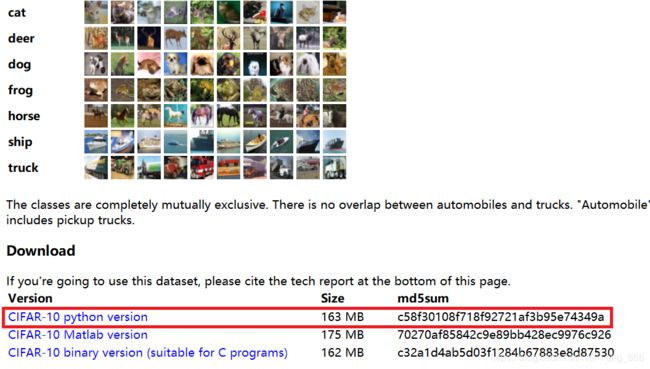
下载完成后得到一个cifar-1-pythoin.tar.gz解压包
![]()
将cifar-1-pythoin.tar.gz解压包解压得到cifar-10-batches-py文件夹
![]()
数据文件名及用途
| 文件名 | 文件用途 |
|---|---|
| batches.meta.txt | 文本文件,存储了每个类别的英文名称。可以用记事本或其他文本文件阅读器打开浏览 |
| data_batch_1.bin、… 、data_batch_5.bin | 这 5 个文件是 CIFAR-10 数据集中的训练数据,每个文件以二进制格式存储了 10000 张 32×32的彩色图像和这些图像对应的类别标签,一共 50000 张训练图像 |
| test_batch.bin | 这个文件存储的是测试图像和测试图像的标签,一共10000 张 |
| readme.html | 数据集介绍文件 |
开始训练模型
导入包和定义参数
导入常用库并载入TensorFlow Models中自动下载、读取CIFAR-10数据的类
import tensorflow as tf
import numpy as np
import time
import cifar10,cifar10_input
定义batch_size、训练轮数max_steps和下载CIFAR-10数据的默认路径
# 最大迭代轮数
max_steps = 3000
# 批大小
batch_size = 128
# 数据所在路径
data_dir = '/tmp/cifar10_data/cifar-10-batches-bin'
定义初始化weight的函数
使用tf.truncated_normal截断的正态分布来初始化权重,再给weight增加一个L2的loss,相当于给L2做了一个正则化。用wl控制L2loss的大小。使用tf.nn.l2_loss函数计算weight的L2loss,再使用tf.multipl让L2乘wl得到最终的weight loss。最后使用tf.add_to_collection把weight loss统一存储到一个名为“losses”的collection中,在后面计算神经网络总体loss时被用上。
def _variable_with_weight_loss(shape, stddev, wd):
var = tf.Variable(tf.truncated_normal(shape, stddev=stddev))
if wd is not None:
weight_decay = tf.multiply(tf.nn.l2_loss(var), wd, name='weight_loss')
tf.add_to_collection('losses', weight_decay)
return var
tf.nn.l2_loss(t, name=None ):用于优化的目标函数中的正则项,防止参数太多复杂容易过拟合。
tf.add_to_collection():向当前计算图中添加张量集合
下载数据集并解压展开到默认位置
cifar10.maybe_download_and_extract()
数据增强和输入
使用cifar10_input类中的distorted_inputs函数产生训练和测试需要使用的数据,包括特征及其对应的label。(已经对数据进行数据增强)
# 训练数据
images_train, labels_train = cifar10_input.distorted_inputs(data_dir=data_dir, batch_size=batch_size)
# 测试数据
images_test, labels_test = cifar10_input.inputs(eval_data=True, data_dir=data_dir, batch_size=batch_size)
创建输入数据的placeholder,包括特征和label
# 尺寸为24×24,颜色通道设为3,代表图片是彩色有RGB三条通道
image_holder = tf.placeholder(tf.float32, [batch_size, 24, 24, 3])
label_holder = tf.placeholder(tf.int32, [batch_size])
定义神经网络
卷积层一
# 卷积核大小为5×5,3个颜色通道,54个卷经核,weight初始化函数的标准差为0.05
weight1 = _variable_with_weight_loss(shape=[5, 5, 3, 64],stddev=5e-2,wd=0.0)
# 卷积操作,步长为1,padding设为SAME
kernel1 = tf.nn.conv2d(image_holder, weight1, [1, 1, 1, 1], padding='SAME')
# bias全部初始化为0
bias1 = tf.Variable(tf.constant(0.0, shape=[64]))
# 使用ReLu激活函数进行非线性化
conv1 = tf.nn.relu(tf.nn.bias_add(kernel1, bias1))
# 使用一个尺寸为3×3,步长为2的×2的最大池化层(最大池化的尺寸和步长不一样可以增加数据的丰富性)
pool1 = tf.nn.max_pool(conv1, ksize=[1, 3, 3, 1], strides=[1, 2, 2, 1],padding='SAME')
# 使用tf.nn.lrn函数对结果进行处理(增强模型的泛化能力)
norm1 = tf.nn.lrn(pool1, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75)
卷积层二
weight2 = _variable_with_weight_loss([5, 5, 64, 64], stddev=5e-2, wd=0.0)
kernel2 = tf.nn.conv2d(norm1, weight2, strides=[1, 1, 1, 1], padding='SAME')
# bias初始为0.1,而不是0
bias2 = tf.Variable(tf.constant(0.1, shape=[64]))
conv2 = tf.nn.relu(tf.nn.bias_add(kernel2, bias2))
# 调换了LRN和池化的顺序
norm2 = tf.nn.lrn(conv2, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75)
pool2 = tf.nn.max_pool(norm2, ksize=[1, 3, 3, 1],strides=[1, 2, 2, 1], padding='SAME')
全连接层三
# 使用 tf.reshape将样本都变成一维
reshape = tf.reshape(pool2, [batch_size, -1])
# 获取数据扁平化后的长度
dim = reshape.get_shape()[1].value
# 使用_variable_with_weight_loss函数对全连接层的weight初始化
weight3 = _variable_with_weight_loss([dim, 384], stddev=0.04, wd=0.004)
bias3 = tf.Variable(tf.constant(0.1, shape=[384]))
local3 = tf.nn.relu(tf.matmul(reshape, weight3) + bias3)
全连接层四
weight4 = _variable_with_weight_loss([384, 192], stddev=0.04, wd=0.004)
bias4 = tf.Variable(tf.constant(0.1, shape=[192]))
local4 = tf.nn.relu(tf.matmul(local3, weight4) + bias4)
全连接层五
weight5 = _variable_with_weight_loss([192, 10],stddev=1/192.0, wd=0.0)
bias5 = tf.Variable(tf.constant(0.0, shape=[10]))
logits = tf.add(tf.matmul(local4, weight5), bias5)
卷积神经网络及结构表
| Layer名称 | 描 述 |
|---|---|
| conv1 | 卷积层和ReLu激活函数 |
| pool1 | 最大池化 |
| norm1 | LRN |
| conv2 | 卷积层和ReLu激活函数 |
| norm2 | LRN |
| pool2 | 最大池化 |
| local3 | 全连接层和ReLu激活函数 |
| local4 | 全连接层和ReLu激活函数 |
| logits | 模型Inference的输出结果 |
计算损失函数loss
def loss(logits, labels):
labels = tf.cast(labels, tf.int64)
cross_entropy = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=labels, logits=logits, name='cross_entropy_per_example')
cross_entropy_mean = tf.reduce_mean(cross_entropy, name='cross_entropy')
tf.add_to_collection('losses', cross_entropy_mean)
return tf.add_n(tf.get_collection('losses'), name='total_loss')
# 将logits节点和label_placeholder传入loss函数获得最终的loss
loss = loss(logits, label_holder)
# 优化器使用Adam Optimizer,学习率设为1e-3
train_op = tf.train.AdamOptimizer(1e-3).minimize(loss)
# 使用tf.nn.in_top_k函数求输出top k的准确率,默认使用top 1,也就是输出分数最高那一类的准确率
top_k_op = tf.nn.in_top_k(logits, label_holder, 1)
创建Sessionc,初始化参数
使用tf.InteractiveSession创建默认Seesion,接着初始化模型的全部参数
sess = tf.InteractiveSession()
tf.global_variables_initializer().run()
启动图片数据增强的线程队列
tf.train.start_queue_runners()
迭代训练
for step in range(max_steps):
start_time = time.time()
# 获取训练数据
image_batch, label_batch = sess.run([images_train, labels_train])
# 计算每次迭代需要的时间
_, loss_value = sess.run([train_op, loss],feed_dict={image_holder: image_batch,label_holder: label_batch})
duration = time.time() - start_time
if step % 10 == 0:
examples_per_sec = batch_size / duration
sec_per_batch = float(duration)
format_str = ('step %d, loss=%.2f (%.1f examples/sec; %.3f sec/batch)')
print(format_str % (step, loss_value, examples_per_sec, sec_per_batch))
在测试集上测评准确率
num_examples = 10000
import math
num_iter = int(math.ceil(num_examples / batch_size))
true_count = 0
total_sample_count = num_iter * batch_size
step = 0
while step < num_iter:
image_batch, label_batch = sess.run([images_test, labels_test])
predictions = sess.run([top_k_op],feed_dict={image_holder: image_batch,label_holder: label_batch})
true_count += np.sum(predictions)
step += 1
precision = true_count / total_sample_count
print('precision @ 1 =%.3f' % precision)
最终训练的准确率约为:73%

全部代码
import tensorflow as tf
import numpy as np
import time
import cifar10,cifar10_input
max_steps = 3000
batch_size = 128
data_dir = '/tmp/cifar10_data/cifar-10-batches-bin'
def _variable_with_weight_loss(shape, stddev, wd):
var = tf.Variable(tf.truncated_normal(shape, stddev=stddev))
if wd is not None:
weight_decay = tf.multiply(tf.nn.l2_loss(var), wd, name='weight_loss')
tf.add_to_collection('losses', weight_decay)
return var
cifar10.maybe_download_and_extract()
images_train, labels_train = cifar10_input.distorted_inputs(data_dir=data_dir, batch_size=batch_size)
images_test, labels_test = cifar10_input.inputs(eval_data=True, data_dir=data_dir, batch_size=batch_size)
image_holder = tf.placeholder(tf.float32, [batch_size, 24, 24, 3])
label_holder = tf.placeholder(tf.int32, [batch_size])
weight1 = _variable_with_weight_loss(shape=[5, 5, 3, 64],stddev=5e-2,wd=0.0)
kernel1 = tf.nn.conv2d(image_holder, weight1, [1, 1, 1, 1], padding='SAME')
bias1 = tf.Variable(tf.constant(0.0, shape=[64]))
conv1 = tf.nn.relu(tf.nn.bias_add(kernel1, bias1))
pool1 = tf.nn.max_pool(conv1, ksize=[1, 3, 3, 1], strides=[1, 2, 2, 1],padding='SAME')
norm1 = tf.nn.lrn(pool1, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75)
weight2 = _variable_with_weight_loss([5, 5, 64, 64], stddev=5e-2, wd=0.0)
kernel2 = tf.nn.conv2d(norm1, weight2, strides=[1, 1, 1, 1], padding='SAME')
bias2 = tf.Variable(tf.constant(0.1, shape=[64]))
conv2 = tf.nn.relu(tf.nn.bias_add(kernel2, bias2))
norm2 = tf.nn.lrn(conv2, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75)
pool2 = tf.nn.max_pool(norm2, ksize=[1, 3, 3, 1],strides=[1, 2, 2, 1], padding='SAME')
reshape = tf.reshape(pool2, [batch_size, -1])
dim = reshape.get_shape()[1].value
weight3 = _variable_with_weight_loss([dim, 384], stddev=0.04, wd=0.004)
bias3 = tf.Variable(tf.constant(0.1, shape=[384]))
local3 = tf.nn.relu(tf.matmul(reshape, weight3) + bias3)
weight4 = _variable_with_weight_loss([384, 192], stddev=0.04, wd=0.004)
bias4 = tf.Variable(tf.constant(0.1, shape=[192]))
local4 = tf.nn.relu(tf.matmul(local3, weight4) + bias4)
weight5 = _variable_with_weight_loss([192, 10],stddev=1/192.0, wd=0.0)
bias5 = tf.Variable(tf.constant(0.0, shape=[10]))
logits = tf.add(tf.matmul(local4, weight5), bias5)
def loss(logits, labels):
labels = tf.cast(labels, tf.int64)
cross_entropy = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=labels, logits=logits, name='cross_entropy_per_example')
cross_entropy_mean = tf.reduce_mean(cross_entropy, name='cross_entropy')
tf.add_to_collection('losses', cross_entropy_mean)
return tf.add_n(tf.get_collection('losses'), name='total_loss')
loss = loss(logits, label_holder)
train_op = tf.train.AdamOptimizer(1e-3).minimize(loss)
top_k_op = tf.nn.in_top_k(logits, label_holder, 1)
sess = tf.InteractiveSession()
tf.global_variables_initializer().run()
tf.train.start_queue_runners()
for step in range(max_steps):
start_time = time.time()
image_batch, label_batch = sess.run([images_train, labels_train])
_, loss_value = sess.run([train_op, loss],feed_dict={image_holder: image_batch,label_holder: label_batch})
duration = time.time() - start_time
if step % 10 == 0:
examples_per_sec = batch_size / duration
sec_per_batch = float(duration)
format_str = ('step %d, loss=%.2f (%.1f examples/sec; %.3f sec/batch)')
print(format_str % (step, loss_value, examples_per_sec, sec_per_batch))
num_examples = 10000
import math
num_iter = int(math.ceil(num_examples / batch_size))
true_count = 0
total_sample_count = num_iter * batch_size
step = 0
while step < num_iter:
image_batch, label_batch = sess.run([images_test, labels_test])
predictions = sess.run([top_k_op],feed_dict={image_holder: image_batch,label_holder: label_batch})
true_count += np.sum(predictions)
step += 1
precision = true_count / total_sample_count
print('precision @ 1 =%.3f' % precision)
项目代码
GitHub地址:https://github.com/WellTung666/Tensorflow/tree/master/CIFAR-10
参考资料
TensorFlow实战