cartographer之trajector_builder的关系问题
文章目录
- map_builder
- 变量
- 1, Collator
- 2, TrajectoryCollator
- 核心方法AddTrajectoryBuilder
- 1, 定义LocalTrajectoryBuilder2D;
- 2, 为trajectory_builders_添加一条CollatedTrajectoryBuilder;
- 3, CollatedTrajectoryBuilder需要sensor_collator_, GlobalTrajectoryBuilder2D;
- 4, data->AddToTrajectoryBuilder
- 5, GlobalTrajectoryBuilder2D->AddSensorData
- collated_trajectory_builder
- CollatorInterface::AddTrajectory
- Dispatchable::Data
- data->AddToTrajectoryBuilder(wrapped_trajectory_builder_.get());
- global_trajectory_builder
- trajectory_builder_interface
- map_builder_interface
- local_trajectory_builder
map_builder
作为一个主要builder串联一个完整的SLAM建图, TrajectoryBuilder(local slam) 和 PoseGraph( loop closure)继承于MapBuilderInterface
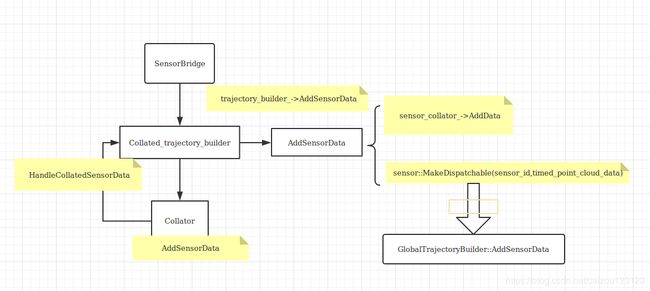
整个global_trajectory_builder, collated_trajectory_builder, collator(TrajectoryCollator) local_trajectory_builder等的关系可以参照下面两幅图像,彼此关系也关联这数据的传递cartographer_ros_传感器数据篇

变量
common::ThreadPool thread_pool_;
std::unique_ptr pose_graph_;
std::unique_ptr sensor_collator_;
std::vector> trajectory_builders_;
构造函数中完成了对变量 pose_graph_和 sensor_collator_的定义
这其中sensor_collator_有两种分别为
1, Collator
void Collator::AddTrajectory(
const int trajectory_id,
const std::unordered_set& expected_sensor_ids,
const Callback& callback)
{
for (const auto& sensor_id : expected_sensor_ids)
{
const auto queue_key = QueueKey{trajectory_id, sensor_id};
queue_.AddQueue(queue_key,
[callback, sensor_id](std::unique_ptr data)
{
callback(sensor_id, std::move(data));
});
queue_keys_[trajectory_id].push_back(queue_key);
}
}
2, TrajectoryCollator
他们都继承与CollatorInterface
核心方法AddTrajectoryBuilder
我们以2D为例:
1, 定义LocalTrajectoryBuilder2D;
2, 为trajectory_builders_添加一条CollatedTrajectoryBuilder;
3, CollatedTrajectoryBuilder需要sensor_collator_, GlobalTrajectoryBuilder2D;
4, data->AddToTrajectoryBuilder
5, GlobalTrajectoryBuilder2D->AddSensorData
CollatedTrajectoryBuilder和GlobalTrajectoryBuilder2D都继承于TrajectoryBuilderInterface
int MapBuilder::AddTrajectoryBuilder(const std::set& expected_sensor_ids,
const proto::TrajectoryBuilderOptions& trajectory_options,
LocalSlamResultCallback local_slam_result_callback)
{
const int trajectory_id = trajectory_builders_.size();
std::unique_ptr local_trajectory_builder;
// 1
if (trajectory_options.has_trajectory_builder_2d_options())
{
local_trajectory_builder = common::make_unique(trajectory_options.trajectory_builder_2d_options(),
SelectRangeSensorIds(expected_sensor_ids));
}
DCHECK(dynamic_cast(pose_graph_.get()));
//2,3
trajectory_builders_.push_back(
common::make_unique(sensor_collator_.get(),
trajectory_id,
expected_sensor_ids,
CreateGlobalTrajectoryBuilder2D(std::move(local_trajectory_builder),
trajectory_id,
static_cast(pose_graph_.get()),
local_slam_result_callback)));
if (trajectory_options.has_overlapping_submaps_trimmer_2d())
{
const auto& trimmer_options = trajectory_options.overlapping_submaps_trimmer_2d();
pose_graph_->AddTrimmer(common::make_unique( trimmer_options.fresh_submaps_count(),
trimmer_options.min_covered_area() / common::Pow2(trajectory_options.trajectory_builder_2d_options()
.submaps_options()
.grid_options_2d()
.resolution()),
trimmer_options.min_added_submaps_count()));
}
}
if (trajectory_options.pure_localization())
{
constexpr int kSubmapsToKeep = 3;
pose_graph_->AddTrimmer(common::make_unique(trajectory_id, kSubmapsToKeep));
}
if (trajectory_options.has_initial_trajectory_pose())
{
const auto& initial_trajectory_pose =trajectory_options.initial_trajectory_pose();
pose_graph_->SetInitialTrajectoryPose(trajectory_id,
initial_trajectory_pose.to_trajectory_id(),
transform::ToRigid3(initial_trajectory_pose.relative_pose()),
common::FromUniversal(initial_trajectory_pose.timestamp()));
}
proto::TrajectoryBuilderOptionsWithSensorIds options_with_sensor_ids_proto;
for (const auto& sensor_id : expected_sensor_ids)
{
*options_with_sensor_ids_proto.add_sensor_id() = ToProto(sensor_id);
}
*options_with_sensor_ids_proto.mutable_trajectory_builder_options() = trajectory_options;
all_trajectory_builder_options_.push_back(options_with_sensor_ids_proto);
CHECK_EQ(trajectory_builders_.size(), all_trajectory_builder_options_.size());
return trajectory_id;
}
collated_trajectory_builder
CollatorInterface::AddTrajectory
CollatedTrajectoryBuilder::CollatedTrajectoryBuilder(sensor::CollatorInterface* const sensor_collator,
const int trajectory_id,
const std::set& expected_sensor_ids,
std::unique_ptr wrapped_trajectory_builder)
: sensor_collator_(sensor_collator),
trajectory_id_(trajectory_id),
wrapped_trajectory_builder_(std::move(wrapped_trajectory_builder)),
last_logging_time_(std::chrono::steady_clock::now())
{
std::unordered_set expected_sensor_id_strings;
for (const auto& sensor_id : expected_sensor_ids)
{
expected_sensor_id_strings.insert(sensor_id.id);
}
sensor_collator_->AddTrajectory(
trajectory_id,
expected_sensor_id_strings,
[this](const std::string& sensor_id, std::unique_ptr data)
{
HandleCollatedSensorData(sensor_id, std::move(data));
}
);
}
void AddSensorData( const std::string& sensor_id,const sensor::TimedPointCloudData& timed_point_cloud_data) override
{
AddData(sensor::MakeDispatchable(sensor_id, timed_point_cloud_data));
}
Dispatchable::Data
template
class Dispatchable : public Data {
public:
Dispatchable(const std::string &sensor_id, const DataType &data)
: Data(sensor_id), data_(data) {}
common::Time GetTime() const override { return data_.time; }
void AddToTrajectoryBuilder(mapping::TrajectoryBuilderInterface *const trajectory_builder) override
{
trajectory_builder->AddSensorData(sensor_id_, data_);
}
const DataType &data() const { return data_; }
private:
const DataType data_;
};
template
std::unique_ptr> MakeDispatchable(
const std::string &sensor_id, const DataType &data) {
return common::make_unique>(sensor_id, data);
}
data->AddToTrajectoryBuilder(wrapped_trajectory_builder_.get());
void CollatedTrajectoryBuilder::HandleCollatedSensorData(const std::string& sensor_id, std::unique_ptr data)
{
LOG(INFO)<<"4, Handle Data";
auto it = rate_timers_.find(sensor_id);
if (it == rate_timers_.end())
{
it = rate_timers_
.emplace(
std::piecewise_construct, std::forward_as_tuple(sensor_id),
std::forward_as_tuple(
common::FromSeconds(kSensorDataRatesLoggingPeriodSeconds)))
.first;
}
it->second.Pulse(data->GetTime());
if (std::chrono::steady_clock::now() - last_logging_time_ >
common::FromSeconds(kSensorDataRatesLoggingPeriodSeconds))
{
for (const auto& pair : rate_timers_)
{
LOG(INFO) << pair.first << " rate: " << pair.second.DebugString();
}
last_logging_time_ = std::chrono::steady_clock::now();
}
data->AddToTrajectoryBuilder(wrapped_trajectory_builder_.get());
}
wrapped_trajectory_builder_.get() 则为
global_trajectory_builder
trajectory_builder_interface
map_builder_interface
一个基础类建图, TrajectoryBuilder + PoseGraph
Creates a new trajectory builder and returns its index.
virtual int AddTrajectoryBuilder(const std::set& expected_sensor_ids,
const proto::TrajectoryBuilderOptions& trajectory_options,
LocalSlamResultCallback local_slam_result_callback) = 0;
Returns the ‘TrajectoryBuilderInterface’ corresponding to the specified ‘trajectory_id’ or ‘nullptr’ if the trajectory has no corresponding builder.
virtual mapping::TrajectoryBuilderInterface* GetTrajectoryBuilder( int trajectory_id) const = 0;
Marks the TrajectoryBuilder corresponding to ‘trajectory_id’ as finished, i.e. no further sensor data is expected.
virtual void FinishTrajectory(int trajectory_id) = 0;