HOG原理与OpenCV实现
方向梯度直方图(Histogram of Oriented Gradient, HOG)于2005年提出,是一种常用的特征提取方法,HOG+SVM在行人检测中有着优异的效果。
HOG特征提取算法原理
在一幅图像中,梯度或边缘的方向密度分布能够很好地描述局部目标区域的特征,HOG正是利用这种思想,对梯度信息做出统计,并生成最后的特征描述。在HOG中,对一幅图像进行了如下划分:
图像(image)->检测窗口(win)->图像块(block)->细胞单元(cell)
流程图如下:
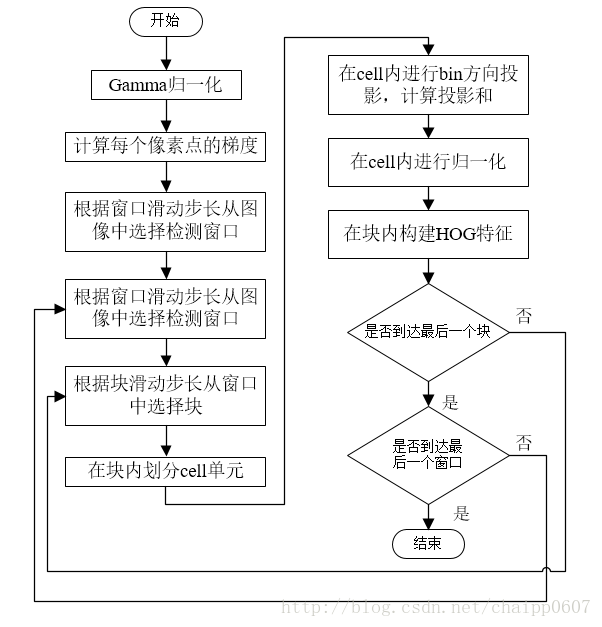
对于上述流程图,有几点需要注意的地方:
1.色彩和伽马归一化为了减少光照因素的影响,首先需要将整个图像进行规范化(归一化)。在图像的纹理强度中,局部的表层曝光贡献的比重较大,所以,这种压缩处理能够有效地降低图像局部的阴影和光照变化。
2.图像的梯度针对的是每一个像素计算得到,然后再cell中进行方向梯度直方图的构建,在block中进行对比度归一化操作。
3.由于窗口的滑动性与块的滑动行,窗口与块都会出现不同程度的重叠(由步长决定),此时在块内划分出的cell就会多次出现,这就意味着:每一个细胞单元的输出都多次作用于最终的描述器。
数字图像梯度的计算:
在二元连续函数的情形下,设函数z=f(x,y)在平面区域D内具有一阶连续偏导数,则对于每一点 p(x,y)⊆D p ( x , y ) ⊆ D ,都可以定出一个向量
这向量称为函数 z=f(x,y) z = f ( x , y ) 在点 p(x,y) p ( x , y ) 的梯度,记作 gradf(x,y) g r a d f ( x , y ) 。
而对于数字图像图像而言,相当于对二维离散函数求梯度,如下:
其中, I(x,y) I ( x , y ) 是图像在点 (x,y) ( x , y ) 处的像素值。
HOG中的win ,block ,cell
HOG最先是用来做行人检测的,显然这是一个目标检测的任务,当我们使用滑动窗遍历方法实现目标检测任务时,首先我们需要构建一个滑动窗,这个滑动窗就是HOG中win的概念。可以理解为,在HOG特征提取时,一个窗口是最小的特征提取单元,在目标检测任务中,滑动窗将以一个设定的步长在整个图像中顺序的滑动,每一次滑动后,都会提取窗口内的HOG特征,提取到的特征将送入到预先训练好的分类器中,如果分类器模型判定其为目标,则完成目标检测任务。
比如,在一个图像中选择检测窗口,依靠检测窗口尺寸,窗口滑动步长与图像尺寸共同决定将选择几个检测窗口,比如图像的尺寸为 166×80 166 × 80 ,检测窗口的尺寸为 64×64 64 × 64 ,窗口步长为 (8,8) ( 8 , 8 ) 。那么在图像的列中将滑动次数如下:
显然这并不合乎逻辑,此时将自动填充,所以列中可以滑动出14个win;
同理,行中滑动次数如下:
所以图像中共滑动 14×3=42 14 × 3 = 42 个窗口。
那么对于一个窗口内选择块是一样的原理,假设给出块的尺寸为 16×16 16 × 16 ,块步长为 (8,8) ( 8 , 8 ) ,经过计算:检测窗口中共滑动 7×7=49 7 × 7 = 49 个block。
在一个块中选择细胞单元不再滑动,给出细胞单元的尺寸为 (8,8) ( 8 , 8 ) ,所以一个块中一共有 2×2=4 2 × 2 = 4 个cell。
在这里有一个需要注意的地方时,窗口在滑动时可以根据像素填充方法补齐的,但是对于块与cell来说,是不可以的。因为这是算法本身的一个硬性要求,所在这要求我们在做窗口尺寸,块尺寸,块步长,单元尺寸选择时,必须满足一下条件:
1.一个窗口内根据块步长与块尺寸滑动块时,必须可以滑动出整数个块。
2.在块内确定单元个数时,必须要整数个单元。
HOG构建方向梯度直方图:
HOG构建方向梯度直方图在cell中完成,bins的个数决定了方向的范围。
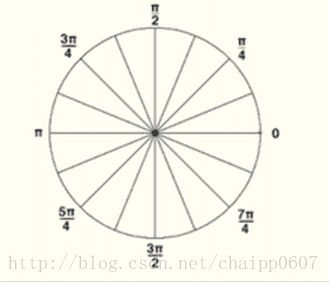
细胞单元中的每一个像素点都为某个基于方向的直方图通道投票。
投票是采取加权投票的方式,即每一票都是带有权值的,这个权值是根据该像素点的梯度幅度计算出来。可以采用幅值本身或者它的函数来表示这个权值,实际测试表明: 使用幅值来表示权值能获得最佳的效果,当然,也可以选择幅值的函数来表示,比如幅值的平方根、幅值的平方、幅值的截断形式等。细胞单元可以是矩形的,也可以是星形的。直方图通道是平均分布在0-180(无向)或0-360(有向)范围内。经研究发现,采用无向的梯度和9个直方图通道,能在行人检测试验中取得最佳的效果。而在这种情况下方向的范围划分为 1809=20 180 9 = 20 度。
特征向量维数
之前提到过,cell的中方向范围的个数由bins来决定,还是以9为例:所以,一个cell中的向量为9个。以上面的例子,在一个尺寸为 64×64 64 × 64 的检测窗中,描述子的维数就应该为: 9×4×49=1764 9 × 4 × 49 = 1764 。其中4为一个block中cell的个数,49为一个win中block的个数。
那么HOG作为一种特征提取算法,对于图像分类问题该如何提取特征呢?此时的窗口将是整幅图像,也就是说,窗口将不再在图像中滑动。
HOG的OpenCV实现
注意事项
在HOG的原理部分,其实我们已经提到了一些注意的事项,那就是块尺寸,块步长,单元尺寸,窗口步长的选择问题。这些参数在自行设计时应该满足滑动出整数的条件,否则代码会出现异常。在Opencv中,在构建类HOGDescriptor的对象时,它是带有初始值的:
CV_WRAP HOGDescriptor() : winSize(64,128), blockSize(16,16), blockStride(8,8),
cellSize(8,8), nbins(9), derivAperture(1), winSigma(-1),
histogramNormType(HOGDescriptor::L2Hys), L2HysThreshold(0.2), gammaCorrection(true),
nlevels(HOGDescriptor::DEFAULT_NLEVELS)计算一下的话会发现这些值满足之前说的条件,所以当我们在设计这些参数时,也要注意这点。
此外,上面这些参数是没有窗口步长的,这是因为窗口步长定义在hog.compute()函数中,该函数对滑动窗是有自动补齐功能的。
代码实现
OpenCV中,HOG被封装在了HOGDescriptor 类中,而且OpenCV提供了直接利用HOG+SVM进行多尺度行人检测的函数detectMultiScale(),在这里我们不介绍它,只说明如何利用HOG提取出可以输入到SVM中的特征矩阵。需要说明的是,这是一个图像分类任务的特征提取过程,所以,这要求我们将整个图像作为一个窗口在构建hog特征。hog.compute()函数在计算特征时,不在滑动窗口。
#include float>(i-1,j) = descriptors[j];
samLabelMat.at<float>(i-1,0) = 1;
}
}
//依次读取负样本图片,生成HOG描述子
for (int k = 1;k <= Negnum ;k++)
{
sprintf_s(adneg, "F:\\neg\\%d.jpg", k);
Mat src = imread(adneg);//读取图片
resize(src,src,Size(64,64));
vector<float> descriptors;//HOG描述子向量
hog.compute(src,descriptors);
for(int l=0; lfloat>(k+Posnum-1,l) = descriptors[l];
samLabelMat.at<float>(k+Posnum-1,0) = -1;
}
}
cout<<"特征个数:"<cout<<"特征维度:"<return 0;
} 代码的逻辑还是很简单的,要注意的地方在于读取正样本的for循环中加入了一个if判断是为了初始化samFeatureMat矩阵的行列,显然,最后SVM要用来训练的矩阵为samFeatureMat和samLabelMat。samLabelMat的列为1,因为他只存放了一个正或负的标签,而samFeatureMat的则为:所有样本的个数*描述子维数。这也就是为啥初始化要放在循环里面了,因为没有提取特征呢,谁知道描述子维数是多少呢?(这样就不用手算了)