深度学习人脸检测框架DFace-win64的调试与视频人脸检测
深度学习人脸检测框架DFace-win64的调试与视频人脸检测
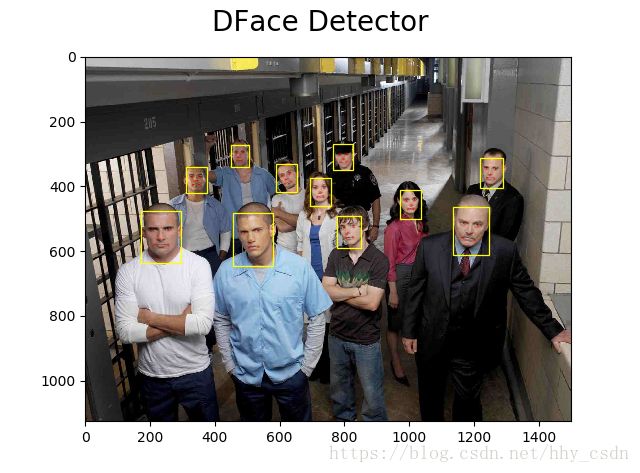
在分辨率不是很高的视频中,Haar+AdaBoost的人脸检测方式精度不是很高,错检也有很多,于是尝试用深度学习的方式来做人脸检测。目标是在视频/图片中检出人脸的位置,画出Bounding Box,以便于作为输入图像进行表情。
本文用到的深度学习人脸检测框架是DFace
在其开源代码的基础上做了修改,简化了部分运算,并将其运用到视频检测中。
一、准备工作
1.Anaconda3环境:pytorch-gpu
CUDA:8.0
cuDNN:5.1
环境配置请参考https://blog.csdn.net/hhy_csdn/article/details/82263078
2.代码
链接:https://pan.baidu.com/s/1iJ7YwvTVnUgpNsZ0vKCp2A 密码:efv9
解压压缩包至K:\Desktop\face_detect\DFace-win64
二、修改代码
激活环境
activate pytorch-gpu运行test_image.py,执行python test_image.py
出现bug
Traceback (most recent call last):
File "test_image.py", line 20, in
bboxs, landmarks = mtcnn_detector.detect_face(img)
File "K:\Desktop\face_detect\DFace-win64\src\core\detect.py", line 602, in detect_face
boxes, boxes_align = self.detect_pnet(img)
File "K:\Desktop\face_detect\DFace-win64\src\core\detect.py", line 263, in detect_pnet
cls_map, reg = self.pnet_detector(feed_imgs)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\modules\module.py", line 325, in __call__
result = self.forward(*input, **kwargs)
File "K:\Desktop\face_detect\DFace-win64\src\core\models.py", line 97, in forward
x = self.pre_layer(x)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\modules\module.py", line 325, in __call__
result = self.forward(*input, **kwargs)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\modules\container.py", line 67, in forward
input = module(input)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\modules\module.py", line 325, in __call__
result = self.forward(*input, **kwargs)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\modules\conv.py", line 277, in forward
self.padding, self.dilation, self.groups)
File "D:\Program Files\Anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\functional.py", line 90, in conv2d
return f(input, weight, bias)
RuntimeError: Input type (CUDADoubleTensor) and weight type (CUDAFloatTensor) should be the same 说的是detect.py某处的数据类型不匹配,也就是说,输入的image是double类型的,但模型文件的权重都是float类型的。通过反复排查,问题出在./src/core/detect.py的255行。只需要做这样的修改:
255行
feed_imgs.append(image_tensor)改成
feed_imgs.append(image_tensor.float())
394行
cls_map, reg = self.rnet_detector(feed_imgs)改成
cls_map, reg = self.rnet_detector(feed_imgs.float())
514行
cls_map, reg, landmark = self.onet_detector(feed_imgs)改成
cls_map, reg, landmark = self.onet_detector(feed_imgs.float())把image_tensor强制转化为float类型,就好了。
重新运行,又出现bug
Traceback (most recent call last):
File "test_image.py", line 20, in
bboxs, landmarks = mtcnn_detector.detect_face(img)
File "K:\Desktop\face_detect\DFace-win64\src\core\detect.py", line 611, in detect_face
boxes, boxes_align = self.detect_rnet(img, boxes_align)
File "K:\Desktop\face_detect\DFace-win64\src\core\detect.py", line 383, in detect_rnet
tmp = np.zeros((tmph[i], tmpw[i], 3), dtype=np.uint8)
ValueError: negative dimensions are not allowed 这个错误是说,在画Bounding Box的时候,bbox的高和宽都负数。。。。
经过两个通宵的排查,最后发现问题出在另一个文件./src/core/image_tools.py的第20行。
image_tools.py的一部分长这个样子。
import torchvision.transforms as transforms
import torch
from torch.autograd.variable import Variable
import numpy as np
transform = transforms.ToTensor()
def convert_image_to_tensor(image):
"""convert an image to pytorch tensor
Parameters:
----------
image: numpy array , h * w * c
Returns:
-------
image_tensor: pytorch.FloatTensor, c * h * w
"""
image = image.astype(np.float)
return transform(image)
# return transform(image)网上查到说ToTensor()这个函数可以把shape=(H x W x C)的像素值范围为[0, 255]的PIL.Image或者numpy.ndarray转换成shape=(C x H x W)的像素值范围为[0.0, 1.0]的torch.FloatTensor。
但是我把transform(image)的值打印出来,发现依然是[0,255],估计模型文件中都是[0,1]的数据分布,所以把bbox的结果算错了。
在函数的最后改成return transform(image)/255
发现还是不对,又双叒叕爆了RuntimeError: Input type (CUDADoubleTensor) and weight type (CUDAFloatTensor) should be the same这个错。
重新查看代码,原来是还有两处地方没有强制转化成float类型。
在detect.py的394行和514行
394行
cls_map, reg = self.rnet_detector(feed_imgs)改成
cls_map, reg = self.rnet_detector(feed_imgs.float())
514行
cls_map, reg, landmark = self.onet_detector(feed_imgs)改成
cls_map, reg, landmark = self.onet_detector(feed_imgs.float())这下终于好了。
PS:我在另一台电脑重复了这个操作,同样的环境和pytorch版本,但是ToTensor()的返回值就是[0,1],所以就不存在ValueError: negative dimensions are not allowed,真是邪了门了。所以在debug时,可以先看一下image_tools.py里面到底正常不正常。
三、精简代码
这份代码可以在检出人脸位置的同时,标定面部的五个特征点,但是这个功能暂时不需要,为了加快运算速度,我对代码做了一些精简。
面部特征点和代码中的landmarks等变量有关,总之就是把与landmarks相关的地方全部注释,并修改相关函数接口。
我把修改好的四个文件放在这里,有需要的,直接替换源目录下的同名文件就可以了。
链接:https://pan.baidu.com/s/1LDLGjGJuEp_LOG2Mt8tJTQ 密码:m67t
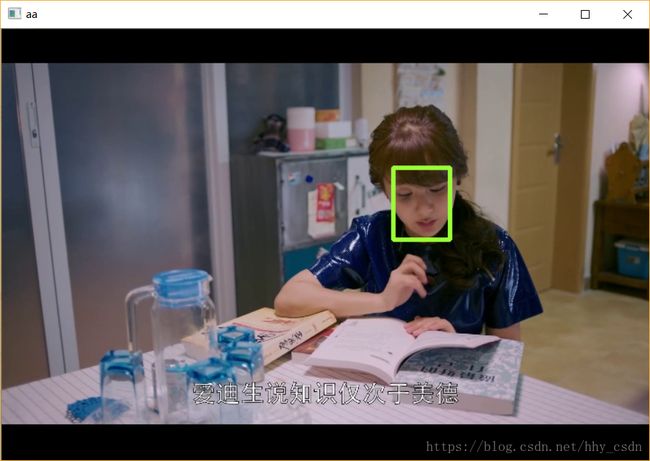
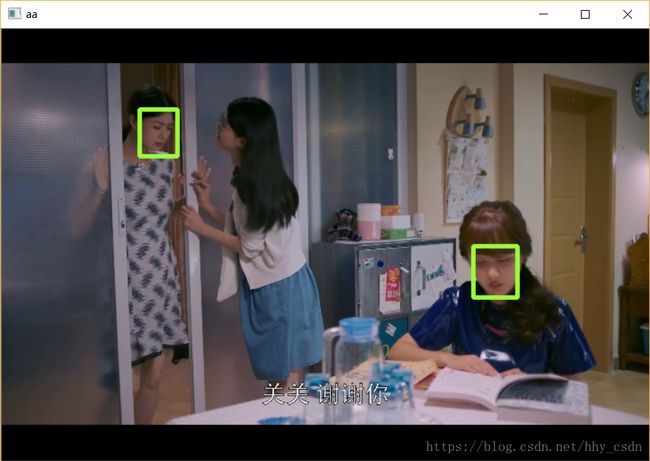
四、视频检测
不再使用自带的vision.py文件进行可视化,而是利用OpenCV。
对test_image.py进行修改,完整的代码是这样的。
import cv2
from src.core.detect import create_mtcnn_net, MtcnnDetector
import src.core.vision as vision
import torch
import numpy as np
if __name__ == '__main__':
p_model_path = "./model_store/pnet_epoch.pt"
r_model_path = "./model_store/rnet_epoch.pt"
o_model_path = "./model_store/onet_epoch.pt"
video_path = "./2.jpg"
pnet, rnet, onet = create_mtcnn_net(p_model_path, r_model_path, o_model_path, use_cuda=True)
mtcnn_detector = MtcnnDetector(pnet=pnet, rnet=rnet, onet=onet, min_face_size=24)
# 启用摄像头,可以改成视频的路径
cap = cv2.VideoCapture(0)
while cap.isOpened():
# 逐帧捕获
ret, frame = cap.read()
bboxs = mtcnn_detector.detect_face(frame)
# print(type(bboxs),bboxs[0],bboxs[1])
# bboxs = bboxs.tolist()
# mtcnn_detector检测不到人脸就会返回一个空的元组,所以加if判断,在不是元组的情况下,才画bbox
if not isinstance(bboxs,tuple):
bboxs = np.round(bboxs).astype('int32')
# print(bboxs)
for i in range(0,int(np.shape(bboxs)[0])):
cv2.rectangle(frame,(bboxs[i,0],bboxs[i,1]),(bboxs[i,2],bboxs[i,3]),(55,255,155),3)
cv2.imshow('video_face_detect',frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 一切完成后,释放捕获
cap.release()
cv2.destroyAllWindows()