强化学习经典算法笔记(三):蒙特卡罗方法Monte Calo Method
强化学习经典算法笔记——蒙特卡罗方法
强化学习经典算法笔记(零):贝尔曼方程的推导
强化学习经典算法笔记(一):价值迭代算法Value Iteration
强化学习经典算法笔记(二):策略迭代算法Policy Iteration
前三篇都是在环境模型已知的情况下求解最优算法,但是很多情况下,环境的模型是未知的,我们不清楚状态之间如何转移,回报的概率是多少,甚至不清楚全部的状态空间长什么样子。这种情况下,如果不采用model-based方法(即,对复杂环境进行建模,建模过程其实就是学习过程,模型建的充分了,智能体对环境就理解充分了,就可以得出最优policy),而是采用model-free的方法(不去对环境进行建模,只用采样的方式学习出一个最优policy),最经典的就是蒙特卡罗算法了。
蒙特卡罗方法
蒙特卡罗的思想早已有之。谈及Monte Calo,必说布丰投针实验。我们做一个改进实验:一个正方形区域边长为 a a a,其中均匀分布了 N N N个散点,取定正方形左下角是原点 O O O,计算每个点与原点的距离 l l l,统计 l ≤ a l\le a l≤a的点数量为 M M M,则
1 4 π a 2 a 2 = M N \frac{\frac14\pi a^2}{a^2}=\frac MN a241πa2=NM
即 π = 4 M / N \pi=4M/N π=4M/N。生成均匀分布的散点,即可以看做分别在四分之一圆和正方形的面积中采样,只要点数够多,散点的数量之比就能代表面积之比。这其中就蕴含着Monte Calo的核心思想——采样Sampling,通过充足的采样来模拟真实环境。
下面是简单代码。
import numpy as np
import math
import random
import matplotlib.pyplot as plt
%matplotlib inline
square_size = 1
# 圆内点数
points_inside_circle = 0
# 方形点数
points_inside_square = 0
# 散点数量
sample_size = 2000
# 用于画圆曲线,计算时不用
arc = np.linspace(0, np.pi/2, 100)
def generate_points(size):
# 生成散点
x = random.random()*size
y = random.random()*size
return (x, y)
def is_in_circle(point, size):
# 判断散点是否在圆内,欧氏距离
return math.sqrt(point[0]**2 + point[1]**2) <= size
def compute_pi(points_inside_circle, points_inside_square):
# 计算 4*M/N
return 4 * (points_inside_circle / points_inside_square)
plt.axes().set_aspect('equal')
plt.plot(1*np.cos(arc), 1*np.sin(arc))
for i in range(sample_size):
point = generate_points(square_size)
plt.plot(point[0], point[1], 'c.')
points_inside_square += 1
if is_in_circle(point, square_size):
points_inside_circle += 1
print("Approximate value of pi is {}" .format(compute_pi(points_inside_circle,points_inside_square)))
估计的 π \pi π值和生成的散点图。

基于蒙特卡罗方法的model-free RL算法
蒙特卡罗方法应用于Value Function的求解过程中。我们已经知道,Value Function是在基于某个策略的前提下,对状态的好坏进行评估的函数。Monte Calo用于值估计的思想很简单:对于状态 s t s_t st,要确定 s t s_t st的价值,也就是 s t s_t st之后直到游戏结束的累计回报,只需要不停地玩游戏,记录每次从 s t s_t st出发,直到结束所得的分数。比如访问了状态 s t s_t st 20次,累计回报是
9, 14, 18, 13, 11, 20, 17, 15, 10, 16, 18, 16, 6, 13, 10, 20, 19, 1, 12, 10
sum = 221
则 V π ( s t ) V^{\pi}(s_t) Vπ(st)可以近似为
221 20 = 10.15 \frac {221}{20}=10.15 20221=10.15
对Q函数的估计也是相似的,记录从状态 s t s_t st出发,采取动作 a a a之后,获得的累计回报,取其平均值,作为 Q π ( s t , a ) Q^{\pi}(s_t,a) Qπ(st,a)的估计。
当然,还有一个问题:同一次游戏中,可能多次访问同一个状态,如何记录多次访问前后的累计回报呢?两个方法:
- 首次访问 First Visit Monte Calo 每局游戏只记录第一次访问 s t s_t st之后的累计回报
- 每次访问 Every Visit Monte Calo 每局游戏记录每次访问 s t s_t st之后的累计回报
编程实现
先简单介绍一下游戏环境Blackjack-v0,就是21点。21点的规则不多介绍,大体上就是比较谁的牌面值之和最接近21。
状态空间Observation向量的长度是3,表示闲家分数、庄家分数、是否将Ace当做11来计算。动作空间就两个取值,Hit或Stand,也就是叫牌或者不叫牌。需要注意的是,21点游戏中,两张牌面值之和最小不是2,是4。因为两张A看做 11 + 1 = 12 11+1=12 11+1=12更有优势,所以最小的数是 2 + 2 = 4 2+2=4 2+2=4。
定义一个简单策略:当前牌面值之和<20就继续叫牌,否则就不叫牌。
def sample_policy(observation):
'''
如果当前牌面值>=20,就不再叫牌(Stand)
如果当前牌面值<20,继续叫牌(Hit)
'''
# observation len=3,分别是闲家分数、庄家分数、是否将A当做11
score, dealer_score, usable_ace = observation
return 0 if score >= 20 else 1
利用这个简单策略玩游戏,记录游戏过程中每一回合的状态、动作、回报数据。
def generate_episode(policy, env):
'''
玩一局游戏,收集状态信息、动作信息和reward
'''
states, actions, rewards = [], [], []
observation = env.reset()
while True:
states.append(observation)
# 根据策略函数,确定采取的动作
action = sample_policy(observation)
actions.append(action)
observation, reward, done, info = env.step(action)
rewards.append(reward)
if done:
break
return states, actions, rewards
实现首次访问的蒙特卡罗算法。
def first_visit_mc_prediction(policy, env, n_episodes):
'''
'''
value_table = defaultdict(float)
N = defaultdict(int)
for _ in range(n_episodes):
states, _, rewards = generate_episode(policy, env)
returns = 0
for t in range(len(states) - 1, -1, -1):
R = rewards[t]
S = states[t]
returns += R
if S not in states[:t]:
N[S] += 1
value_table[S] += (returns - value_table[S]) / N[S]
return value_table
完整代码,最后画出Value Function。
import numpy
import gym
from matplotlib import pyplot
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from collections import defaultdict
from functools import partial
%matplotlib inline
plt.style.use('ggplot')
## Blackjack Environment
env = gym.make('Blackjack-v0')
def sample_policy(observation):
'''
如果当前牌面值>=20,就不再叫牌(Stand)
如果当前牌面值<20,继续叫牌(Hit)
'''
# observation len=3,分别是闲家分数、庄家分数、是否将A当做11
score, dealer_score, usable_ace = observation
return 0 if score >= 20 else 1
def generate_episode(policy, env):
'''
玩一局游戏,收集状态信息、动作信息和reward
'''
states, actions, rewards = [], [], []
observation = env.reset()
while True:
states.append(observation)
# 根据策略函数,确定采取的动作
action = sample_policy(observation)
actions.append(action)
observation, reward, done, info = env.step(action)
rewards.append(reward)
if done:
break
return states, actions, rewards
def first_visit_mc_prediction(policy, env, n_episodes):
'''
'''
value_table = defaultdict(float)
N = defaultdict(int)
for _ in range(n_episodes):
states, _, rewards = generate_episode(policy, env)
returns = 0
for t in range(len(states) - 1, -1, -1):
R = rewards[t]
S = states[t]
returns += R
if S not in states[:t]:
N[S] += 1
value_table[S] += (returns - value_table[S]) / N[S]
return value_table
def plot_blackjack(V, ax1, ax2):
player_sum = numpy.arange(12, 21 + 1)
dealer_show = numpy.arange(1, 10 + 1)
usable_ace = numpy.array([False, True])
state_values = numpy.zeros((len(player_sum),
len(dealer_show),
len(usable_ace)))
for i, player in enumerate(player_sum):
for j, dealer in enumerate(dealer_show):
for k, ace in enumerate(usable_ace):
state_values[i, j, k] = V[player, dealer, ace]
print(np.shape(state_values))
X, Y = numpy.meshgrid(player_sum, dealer_show)
ax1.plot_wireframe(X, Y, state_values[:, :, 0])
ax2.plot_wireframe(X, Y, state_values[:, :, 1])
for ax in ax1, ax2:
ax.set_zlim(-1, 1)
ax.set_ylabel('player sum')
ax.set_xlabel('dealer showing')
ax.set_zlabel('state-value')
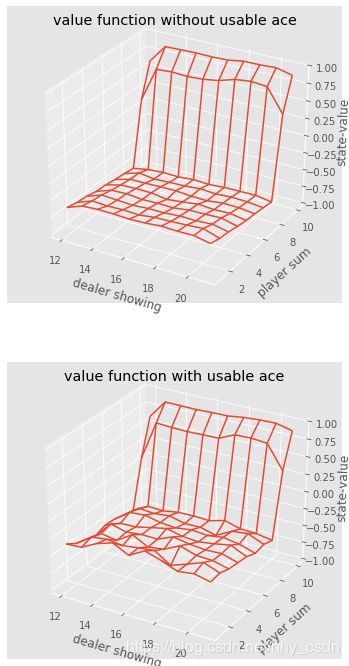
fig, axes = pyplot.subplots(nrows=2, figsize=(5, 8), subplot_kw={'projection': '3d'})
axes[0].set_title('value function without usable ace')
axes[1].set_title('value function with usable ace')
value = first_visit_mc_prediction(sample_policy, env, n_episodes=500000)
plot_blackjack(value, axes[0], axes[1])
价值函数三维函数。由于observation是三维向量(闲家牌值,庄家牌值,是否把A当做11),所以把最后一维拆开来画。第一张图是 不把A当做11(即,without usable Ace)的情况下把前两维(闲家牌值,庄家牌值)画出来的,第二张图是with usable Ace的情况下画的。