moveit的3D Perception功能(环境感知)
ROS的moveit中,可以使用深度相机感知环境数据,生成一种被称为octomap的方格地图,感知后的环境可以作为环境障碍物,机械臂规划路径时会主动避开有octomap地图的地方。其中用到了moveit的组件 Occupancy Map Updater,Occupancy Map Updater 接受两种数据
1、pointcloud2点云
2、深度图 sensor_msgs/Image
下面以一个官方示例例程来展示moveit的3d 感知功能。
操作系统:ubuntu16.04
ROS版本:kinetic
3D感知方式:pointcloud2点云
示例机器人:Panda
1、下载并配置示例工程
完整过程:
https://ros-planning.github.io/moveit_tutorials/doc/getting_started/getting_started.html
简化过程如下:
首先,建立一个新空间
mkdir -p ~/ws_moveit/src
cd ..
catkin_make
之后,下载官方示例程序到src目录
cd ~/ws_moveit/src
git clone https://github.com/ros-planning/moveit_tutorials.git
git clone https://github.com/ros-planning/panda_moveit_config.git
如果担心却相关组件,可以执行下述命令
cd ~/ws_moveit/src
rosdep install -y --from-paths . --ignore-src --rosdistro kinetic
2、修改moveit配置文件
完整过程:
https://ros-planning.github.io/moveit_tutorials/doc/perception_pipeline/perception_pipeline_tutorial.html
简要过程如下:
(1)编写一个关于传感器的yaml配置文件:sensors_kinect_pointcloud.yaml,放在panda_moveit_config/config目录下
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: /camera/depth_registered/points
max_range: 5.0
point_subsample: 1
padding_offset: 0.1
padding_scale: 1.0
max_update_rate: 1.0
filtered_cloud_topic: filtered_cloud
(2)填写一份launch文件。
在panda_moveit_config/launch目录下,有两个与sensor相关的launch文件
一个是sensor_manager.launch.xml,该文件是moveit生成配置文件后自动生成好的。
另一个是XXX_moveit_sensor_manager.launch.xml文件,这也是自动生成好的,只不过是个空的launch文件,需要填写以下内容。
//这个参数是octomap所在坐标系,可以自己指定
//octomap的分辨率,越小分辨率越高,越消耗系统资源。
到此,就可以启动示例程序观看效果了。
roslaunch moveit_tutorials obstacle_avoidance_demo.launch //如果source空间的命令没加入.bashrc文件,记得source工作空间
显示效果如下:

该示例程序的运行内容:
(1)回放了一个深度相机的数据包。
由于并没有真实或仿真环境下的深度相机传感器,所以数据来源是教程里提前录制好的。你可以通过添加pointcloud2视图来查看发布的点云数据。
 (2)启动了panda的moveit配置程序,这里并没有用到gazebo等仿真环境。
(2)启动了panda的moveit配置程序,这里并没有用到gazebo等仿真环境。
可能遇到的问题:
问题1:octomap地图并没有立即显示出来。
由于octomap的生成比较耗费系统资源,不同电脑加载可能需要的时间不一样。
–>如果你启动了上述示例但是在3~5s内都没看见octomap地图,在稍等若干秒,就应该能看到。
–>若还是没看到,请查看命令行程序是否有红色报错提示,若看到下面的提示,就是有问题了,没发现太好的解决办法,重新启动示例程序多试几次。

–>若系统显示实在是太吃力,请将上文octomap_resolution参数修改的大一些,让地图显示的粗略一些。
正常的话启动后应该显示如下:

问题2:找不到depth_image_octomap_updater插件所需要的库。
[ERROR] [1528466140.174800759]: Exception while loading octomap updater 'occupancy_map_monitor/DepthImageOctomapUpdater':
Could not find library corresponding to plugin occupancy_map_monitor/DepthImageOctomapUpdater.
Make sure the plugin description XML file has the correct name of the library and that the library actually exists.
跑上述教程其实不会遇到这个问题,因为我们是通过点云来生成octomap的,但文章开头也说了,moveit还可以通过深度图来显示octomap,如果你正在尝试使用深度图来生成octomap地图,那么,上述报错是有可能产生的。
问题原因:
moveit的某一版本出了点小小状况,下载后确实不包含depth_image_octomap_updater相关动态链接库,在github最新的moveit版本中,已经不存在这个问题,下载新版本重新编译即可。
网上对此问题的讨论:https://github.com/ros-planning/moveit/issues/943
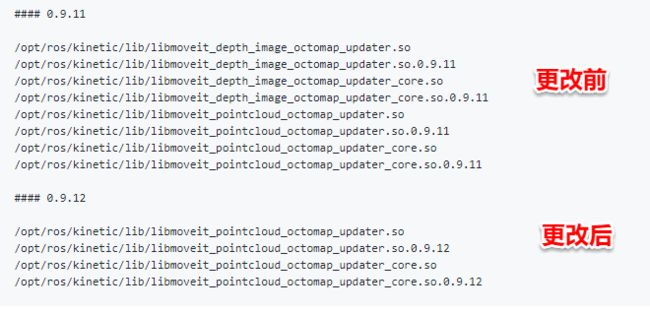
可以看出,这一版本的moveit更改导致少了4个与depth_image_octomap_updater相关的库。
解决办法:
下载moveit的最新源码,编译成功后,可以查看所有编译生成的文件,搜索depth_image_octomap_updater开头的所有.so文件,应该有4个,全部复制到/opt/ros/kinetic/lib目录下。