Pixhawk开发环境搭建之PX4固件编译
一 Windows环境下编译
1.1编译前期准备
1. 软件下载
需要安装CMake、Java jre或者jdk以及PX4 Toolchain Installer。下载链接如下:
CMake:https://cmake.org/download/(选择适合系统的版本)
Jave jre:http://rj.baidu.com/soft/detail/10463.html?ald
PX4 Toolchain Installer:http://dev.px4.io/starting-installing-windows.html (下载适合操作系统的PX4 Toolchain)
2. 软件安装
按照操作流程一步一步安装即可。
3. 编译Pixhawk原生固件PX4
3.1 工具链下载
相关文件下载:arm-none-eabi-gcc
下载链接:https://launchpad.net/gcc-arm-embedded/+download
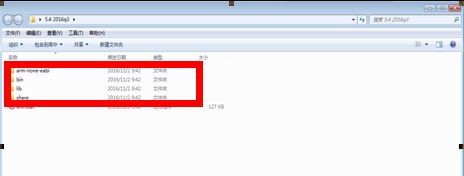
下载完之后解压到桌面
之后桌面会出现文件夹,打开文件夹5.42016q3,并将文件夹中的四个文件夹复制并替换到PX4Toolchain安装目录下的toolchain文件夹下。如下图所示:
执行完成后,就可以开始下一步了。
工具链最好下载最新版的,否则会造成字节溢出。具体在下面编译过程会说明。(但是最新版有可能在编译ardupilot固件时出现问题,所以请选择合适的工具链版本。目前4.9q3的工具链可以同时编译成功PX4固件和ardupilot固件)
1.2 console下代码编译
打开PX4console,该截图打开方式会在windows开始菜单中的所有程序找到。
下载PX4固件,输入指令:git clone https://github.com/PX4/Firmware.git
(下载需要一定时间,请耐心等待)
下载完成之后,切换到Firmware文件夹,输入指令:cd Firmware
之后输入指令,进行初始化:
git submodule init
git submodule update --init --recursive
现在到了前面提到的字节溢出的问题地方了。
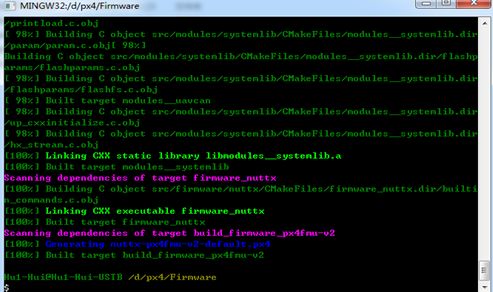
完成上述指令后,输入指令,进行编译:make px4fmu-v2_default
编译成功的界面如下图所示:
如果在没有进行arm-none-eabi-gcc替换或者替换的版本过低的情况下,直接进行固件编译,则会出现如下"overload"所示的错误:
所以出现这类问题可下载高版本的arm-none-eabi-gcc,一般不会出现溢出的问题。
3.3 固件烧录
将飞控板通过USB连接电脑,输入以下指令即可完成固件的烧录:
make px4fmu-v2_default upload
1.3 Eclipse下编译
建立工程
File -> New -> Makefile Project with Existing Code。
然后点击Browse……到C:\px4\Firmware,并选择Cross GCC,点击Finish。
创建编译目标
可以在右边板块中
Make Target( 或者菜单 Window -> Show View -> Make Target 也可以打开),选中根文件夹(Firmware),可以创建新的 make Target(绿色圆形按钮)。 如创建目标px4fmu-v2_default 。同理创建目标:all,archives,clean,distclean,px4io-v2_default,px4fmu-v2_default upload。
各 make target 说明
all – builds theautopilot software (depends on archives)
archives– 编译实时系统 NuttX OS
distclean– 删除所有编译的文件,包括编译的操作系统
clean – 删除编译的固件相关文件,不会清除archives
px4fmu-v2_default—FMU固件
px4io-v2_default—IO固件
px4fmu-v2_defaultupload – 烧录固件到飞控板
路径配置
配置好Eclipse软件的路径才能进行编译,打开目录栏的Project ->Priorities 。设置成如下路径即可。



编译固件
依次编译需要的固件即可。(相应的编译目标点锤子符号)
二 Linux环境下编译
环境:ubuntu14.04LTSLinux下控制台编译的步骤资料比较多,没有写详细步骤,可正常编译。官网步骤:http://dev.px4.io/starting-installing-linux.html参考博客:http://blog.csdn.net/wangcfan/article/details/51271608Qtcreator编译
官网:http://dev.px4.io/starting-building.html
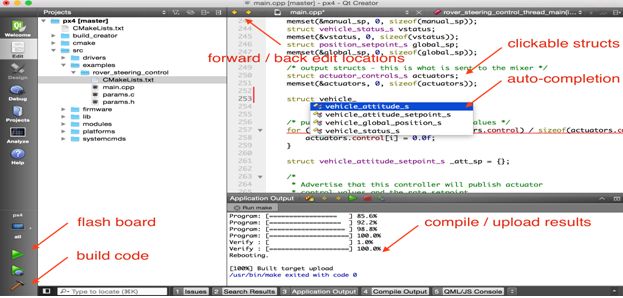
2.1 启动qt
2.2建立project file
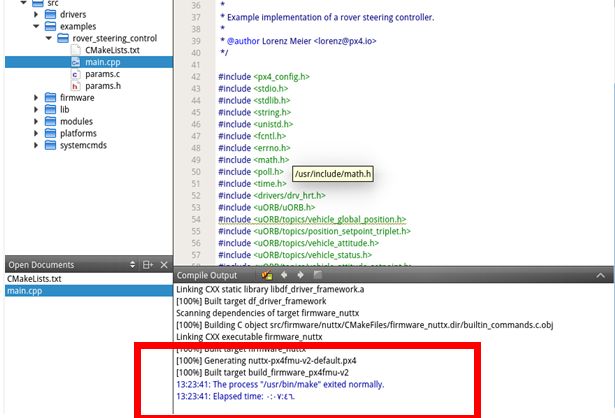
3.3选择File -> Open File or Project ->选择主文件夹的CMakeLists.txt
3.4 配置
3.5编译