非监督特征学习与深度学习(七)----多层神经网络
注:本文转载自https://github.com/ysh329/Chinese-UFLDL-Tutorial
因为github上的makedown格式显示的不够完全,看的非常不方便,因此放到CSDN上比较好查阅学习。
多层神经网络(Multi-Layer Neural Network)
考虑一个监督学习问题,即使用带标签的训练样本 (x(i),y(i)) 。神经网络给出一种定义复杂非线性假设的形式 hW,b(x) ,该形式有参数 W,b ,可被用来拟合数据。
说到神经网络,我们从一个最简单的单个神经元的神经网络开始。下面这幅图就表示单个神经元:
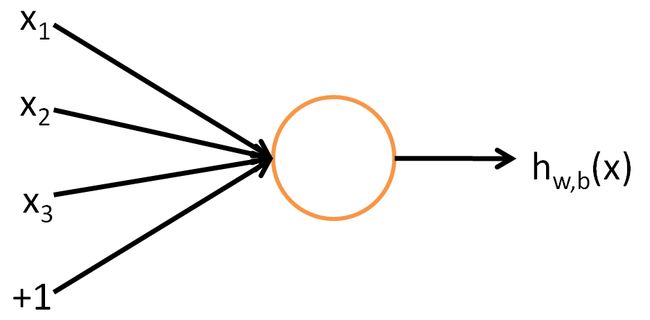
该神经元是一个接收 x1,x2,x3 输入的计算单元(其中,有一个输入 +1 是截距项),它会输出 hW,b(x)=f(WTx)=f(∑3i=1Wixi+b) 。其中, f:R↦R 称为“激活函数”。本文选择 S 型函数作为激活函数 f(⋅) :
该神经元被定义为一种逻辑斯特回归形式的输入-输出映射。
尽管本文使用的激活函数是 S 型函数,但双曲正切或正切函数也是常见的激活函数 f 可供选择,下面是双曲正切函数:
最近的研表明了一种与众不同的激活函数,校正线性函数( the Rectified Linear Function ,译者注:但实际中没人这么说,一般都称为 ReLU ),对于深层神经网络的训练,其效果更好。这种激活函数与 S 型函数和双曲正切函数 tanh 不同,因为该函数值没有上界,而且不是连续可微的。下面给出 ReLU 激活函数的形式:
下图是 S 型函数,双曲正切函数 tanh 以及 ReLU 函数的图像:
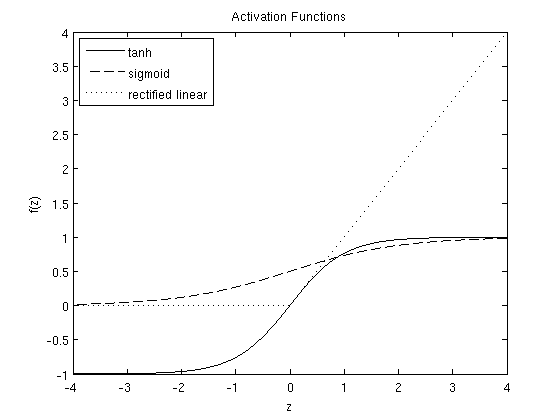
双曲正切函数 tanh(z) 是 S 型函数的一个缩放版本,其输出范围是 [−1,1] ,而不是 [0,1] 。 ReLU 函数是一个线性分段函数,当输入 z 的值小于 0 时,其函数值为 0 。
需注意的是,与其它地方( OpenClass ,以及部分 CS229 的课程)不同,截距项的表示没有按照惯例用 x0=1 表示,而是由参数 b 单独表示。
最后,说一个在后文有用的恒等式: f(z)=1/(1+exp(−z)) 是一个 S 型函数,其导数为 f′(z)=f(z)(1−f(z)) (若 f 是双曲函数 tanh ,则其导数为 f′(z)=1−(f(z))2 ),您也可以根据导数的定义对 S 型函数(或双曲函数 tanh )求导。 ReLU 函数在输入 z≤0 时梯度为 0 ,其它取值时为 1 ,输入值 z=0 时的梯度是未定义的,但这不会在实际中引起问题,因为在优化过程中,某次迭代的梯度值是基于大量训练样本计算出的梯度的平均。
神经网络模型(Neural Network model)
神经网络是通过将众多简单的神经元连接在一起得到的,一个神经元的输出可作为另一神经元的输入。例如,这里有一个小神经网络:

图中,用圆圈表示网络输入。圈里被标为 “+1” 的圆圈称为偏置单元,对应于截距项。网络最左边的那一层称为输入层,而输出层即最右层(在这个例子中,输出层只有一个节点)。介于最左(输入层)和最右(输出层)的中间层称为隐藏层,称为“隐藏”是因为其值在训练集中无法观察到。该例中的神经网络有 3 个输入单元(不计偏置单元计算在内), 3 个隐藏单元,和 1 个输出单元。
nl 表示网络的层数;在该例中的神经网络层数 nl=3 。第一层 l 表示为 L1 ,层 L1 即输入层,输出层用 Lnl 来表示。神经网络模型的参数是 (W,b)=(W(1),b(1),W(2),b(2)) ,参数 W(l)ij 表示第 l 层的第 j 个单元与第 l+1 层的第 i 个单元的连接权重。请注意下标的次序, b(l)i 是第 l+1 层的第 i 个单元的偏置。因此,在我们的例子中,我们有 W(1)∈R3×3 , W(2)∈R1×3 。需要注意的是,偏置单元没有与上层的连接,它们输出的值总是为 “+1”。 sl 表示第 l 层节点单元的数量(不包括偏置单元)。
a(l)i 表示第 l 层的第 i 个单元的激活值(也可理解为输出值)。当层数 l=1 时,用 a(1)i=xi 表示第 i 层的输入。当参数 W,b 为确定值时(译者注:即确定了模型的参数),神经网络即定义了一个能输出实数的假设 hW,b(x) 。具体而言,该神经网络表示的计算为:
在后文中,还将用 z(l)i 表示第 l 层的第 i 个单元输入的总加权求和,其中包含偏置项(例如,第 2 层的第 i 个单元输入的总加权求和值为 z(2)i=∑nj=1W(1)ijxj+b(1)i ),第 l 层的第 i 个单元(译者注:即激活单元的计算或输出值)为 a(l)i=f(z(l)i) 。
需要注意的是,后一种写法更紧凑。具体来说,将激活函数 f(⋅) 应用到向量中的每一个元素上(例如, f([z1,z2,z3])=[f(z1),f(z2),f(z3)] ),那么可以把上述方程写成一种更紧凑的形式:
这一步称为前向传播( Forward Propagation )。可以写成更一般的情况,回顾一下先前使用 a(1)=x 表示输入层的值(译者注:为与下一句对应,因为输入层没有激活函数,输入层 a(1) 相当于第一层的输出),那么第 l 层的激活(输出)表示为 a(l) ,那么写成更一般的形式,计算第 l+1 层的激活(输出) a(l+1) 表示为:
通过组织原本的参数到矩阵中,可以充分利用矩阵操作进行网络参数的快速计算。
从开始到现在,我们都集中在一开始的神经网络的架构上,但也可以建立其它体系结构(即神经元之间的连接模式),比方包括多个隐藏层。最常见的是一个 nl 层网络,层 1 为输入层,层 nl 为输出层,层 l 到层 l+1 都是密集连接(译者注:即全连接)起来的。此时,计算网络的输出,可以用上述公式中描述的传播步骤,依次计算所有的激活层,从层 L2 ,到层 L3 等等,直到层 Lnl 。这是一个前馈神经网络( Feedforward Neural Network )的例子,前馈网络,即没有任何有向环或闭合圈的连通图。
神经网络的输出层可以有多个输出单元。例如,下图是一个有着 L2 和 L3 两个隐含层,以及在输出层 L4 有两个输出单元的神经网络:
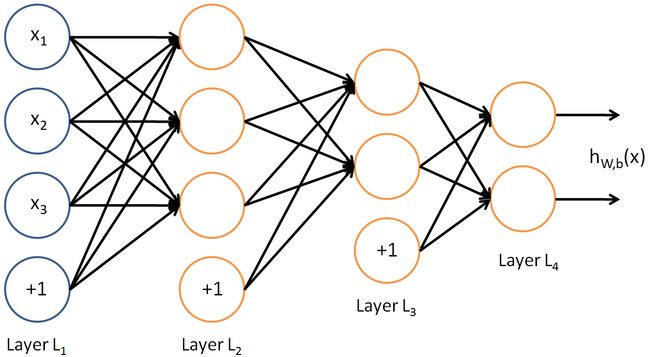
为训练该网络,需要带类别标签的训练样本 (x(i),y(i)) ,其中 y(i)∈R2 。若您的预测需要有多个输出,那么就可以使用这种网络架构。(例如,在医学诊断中的应用,输入特征是向量 x 表示病人的某些特征,需要的输出可能表明不同种疾病(译者注:多个类别)是否存在。)
反向传播算法(Backpropagation Algorithm)
假设有一组固定的训练集 {(x(1),y(1)),…,(x(m),y(m))} 。可以使用批量梯度下降算法训练网络。当一个训练样本 (x,y) 时,成本函数定义为:
这是一个(半)平方误差函数。给定一组有 m 个样本的训练集,成本函数定义为:
在 J(W,b) 定义中的第一项是均方差项。第二项是一个正则化项(也叫权重衰减项),它会降低权重的大小,并有助于防止过拟合。
(注:权重衰减通常不用在偏置项 b(l)i ),比如 J(W,b) 在定义中就没有使用权重衰减。一般来说,将权重衰减应用到偏置单元中只会对最终的神经网络产生很小的影响。如果您在斯坦福选修过 CS229 (机器学习)课程,或者在 YouTube 上看过该课程视频,您也许会认识到这里的权重衰减,其实是课上提到的贝叶斯正则化方法的变种,在贝叶斯正则化中,高斯先验概率被引入到参数中计算 MAP (极大后验)估计(而不是极大似然估计)。
权重衰减参数 λ 用于控制公式中两项的相对重要性。在此重申一下这两个复杂函数的含义: J(W,b;x,y) 是针对单个样本计算平方误差得到的代价函数;而 J(W,b) 则是对整体样本的代价函数,它包含权重衰减项。
以上的代价函数通常被用来解决分类和回归问题。在分类问题上,分别用 y=0 或 1 来表示这两个类标签(回顾一下 S 型激活函数的输出值介于 [0,1] 之间;如果我们之前使用 tanh 双曲正切激活函数,那么激活函数的输出值将会是 −1 和 +1 ,刚好用来代表两类)。在回归问题上,首先放缩输出值范围,确保最终其输出值在 [0,1] 上(如果使用双曲正切激活函数,那么输出值在 [−1,1] 上)。
优化的目标是最小化把 W 和 b 作为参数的函数 J(W,b) 。为训练神经网络将会初始化每一个 W(l)ij 参数,以及每一个 b(l)i 参数,它们会被初始化为接近 0 且小的随机值(对于初始化的方法,比方用正态分布 Normal(0,ϵ2) 生成随机值,其中 ϵ 设置为 0.01 ),之后再对目标函数应用如批量梯度下降法( Batch Gradient Descent )等方法来对参数优化。因为 J(W,b) 是一个非凸函数,梯度下降有可能使函数值到达局部最优;然而在实际中,梯度下降的效果通常还不错。最后需要注意的是,对参数进行随机初始化是很重要的,而不是把它们的值全部初始化为 0 。如果所有的参数都起始于一个相同的值,那么所有的隐含层单元将会学习到一样的函数值(对于所有的 i 值, W(1)ij 将总是相同的,即对任意输入 x ,有 a(2)1=a(2)2=a(2)3=… )。随机初始化的目的是使 对称失效 ( Symmetry Breaking )。
梯度下降法中每一次迭代都按照如下公式对参数 W 和 b 进行更新:
其中, α 是学习率,上述公式中一个关键步骤是计算偏导数。现在来讲一下 反向传播 ( Backpropagation )算法,它是一种计算偏导数的高效方法。
首先讲反向传播是如何计算 ∂∂W(l)ijJ(W,b;x,y) 和 ∂∂b(l)iJ(W,b;x,y) 的,以及针对一个样本 (x,y) 的代价函数 J(W,b;x,y) 的偏导数。一旦把这些计算出来了,将会很容易地得到计算所有样本的代价函数 J(W,b) 的偏导数:
上述两个公式略有不同,因为权重衰减应用在参数 W 上,而不是参数 b 。
反向传播算法背后的过程如下:给定一个训练样本 (x,y) ,首先前向传递计算整个网络的每层激活,以及假设最终输出的 hW,b(x) 。之后反向回传误差,对每层 l 的每个节点 i 计算一个误差项( error term ) δ(nl)i ,该误差项描述的是当前节点对网络输出层误差的贡献度。
对输出层节点而言,可以直接计算出网络在该节点的输出值(即激活值)和真实目标值的差距,该值就是误差项 δ(nl)i (第 nl 层是输出层)。
那隐单元的误差项呢?对隐含单元来说,基于误差项的加权平均,即把 a(l)i 作为输入的节点的误差项的加权平均,来计算 δ(l)i ,反向传播算法的描述如下:
- 前向传递计算层 L2,L3 直到输出层 Ln 的激活函数值。
- 对第 Ln 层的第 i 个输出单元,计算该输出单元的误差项
δ(nl)i=∂∂z(nl)i12∥∥y−hW,b(x)∥∥2=−(yi−a(nl)i)⋅f′(z(nl)i) - 循环层数。 For l=nl−1,nl−2,nl−3,…,2
- 循环当前层(第 l 层)节点(第 i 个节点),设定
δ(l)i=⎛⎝∑j=1sl+1W(l)jiδ(l+1)j⎞⎠f′(z(l)i)
- 循环当前层(第 l 层)节点(第 i 个节点),设定
- 计算所需部分的偏微分,如下已给出:
∂∂W(l)ijJ(W,b;x,y)∂∂b(l)iJ(W,b;x,y)=a(l)jδ(l+1)i=δ(l+1)i.
用矩阵或向量的符号标记来重写算法。使用 ∙ 来表示逐个元素的点乘操作(在 Matlab 或 Octave 中,用 .* 表示点乘操作,也称为 Hadamard 乘积)。两个向量对应元素的点乘是 a=b∙c ,逐个元素的点乘表示为 ai=bici 。 f(⋅) 和 f′(⋅) 也都可以应用到向量上,从原本逐个元素的形式改写成等价的形式: f′([z1,z2,z3])=[f′(z1),f′(z2),f′(z3)] 。
现在,矩阵形式的反向传播算法描述如下:
- 前馈传播计算第 2 和 第 3 层( L2,L3 )直到输出层 Ln 的激活函数值。
- 计算输出层(即第 nl 层)与实际值的误差
δ(nl)=−(y−a(nl))∙f′(z(nl)) - 反向循环层数 l 。 For l=nl−1,nl−2,nl−3,…,2 ,反向计算各层每个神经元的误差
δ(l)=((W(l))Tδ(l+1))∙f′(z(l)) - 计算所需部分的偏微分,如下已给出:
∇W(l)J(W,b;x,y)∇b(l)J(W,b;x,y)=δ(l+1)(a(l))T,=δ(l+1).
实现须知:在以上所述的第 2 、第 3 步中,需要计算第 l 层中每个节点 i 的偏导数 f′(z(l)i) 。若 f(z) 是 S 型激活函数,先前已经将第 l 层的第 i 个节点的激活函数值存储在了网络中。因此,可以通过先前得出的 f′(z) 的表达式,计算第 l 层中第 i 个节点的激活函数的偏导数 f′(z(l)i)=a(l)i(1−a(l)i) ,从而可进一步计算反向回传到第 l 层的误差项。
现在,便可以描述完整的梯度下降算法了。下面是伪代码, ΔW(l) 是一个矩阵(与 W(l) 同一维度), Δb(l) 是一个向量(与 b(l) 同一维度)。注意这个符号, ΔW(l) 是一个矩阵,尤其要说明的是,它并不是 Δ 乘以 W(l) ,实现一次梯度下降的过程如下:
- 对所有层 l ,设定矩阵或向量中元素值均为 0 : ΔW(l):=0 , Δb(l):=0 。
- For i=1 to m ,
- 使用反向传播计算 ∇W(l)J(W,b;x,y) 和 ∇b(l)J(W,b;x,y) 。
- 设定 ΔW(l):=ΔW(l)+∇W(l)J(W,b;x,y) 。
- 设定 Δb(l):=Δb(l)+∇b(l)J(W,b;x,y)
- 更新参数:
W(l)b(l)=W(l)−α[(1mΔW(l))+λW(l)]=b(l)−α[1mΔb(l)]
现在,就可以通过反复迭代上述梯度下降的步骤来训练神经网络,来寻找成本函数 J(W,b) 最小值时候的参数值。