yolov3原理+训练损失
分类器
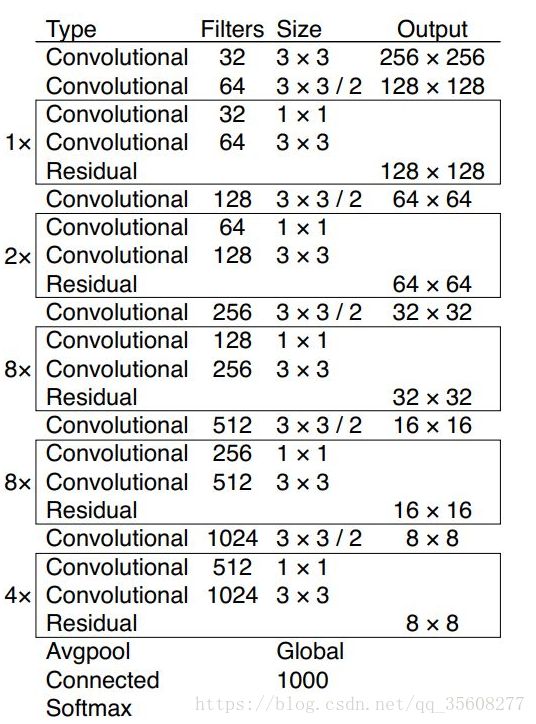
darknet-53(52层卷积层+1FC )
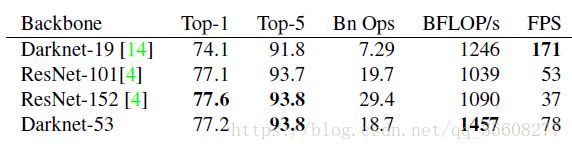
实现每秒最高的测量浮点运算。这意味着网络结构可以更好地利用GPU,从而使其评估效率更高,速度更快。
Darknet-53比ResNet-101更好,速度更快1:5倍。 Darknet-53与ResNet-152具有相似的性能,速度提高2倍。
多尺度预测
坐标预测: bbox 预测仍是yolov2的使用维度聚类(dimension clusters )作为anchor boxes来预测边界框. 在训练期间,我们使用平方误差损失的总和。
对象分数: YOLOv3使用逻辑回归预测每个边界框(bounding box)的对象分数。 如果先前的边界框比之前的任何其他边界框重叠ground truth对象,则该值应该为1。如果以前的边界框不是最好的,但是确实将ground truth对象重叠了一定的阈值以上,我们会忽略这个预测,按照[15]进行。我们使用阈值0.5。与[15]不同,我们的系统只为每个ground truth对象分配一个边界框。如果先前的边界框未分配给grounding box对象,则不会对坐标或类别预测造成损失。
类别预测: 每个框使用多标签分类来预测边界框可能包含的类。在训练过程中,使用二元交叉熵损失来进行类别预测。
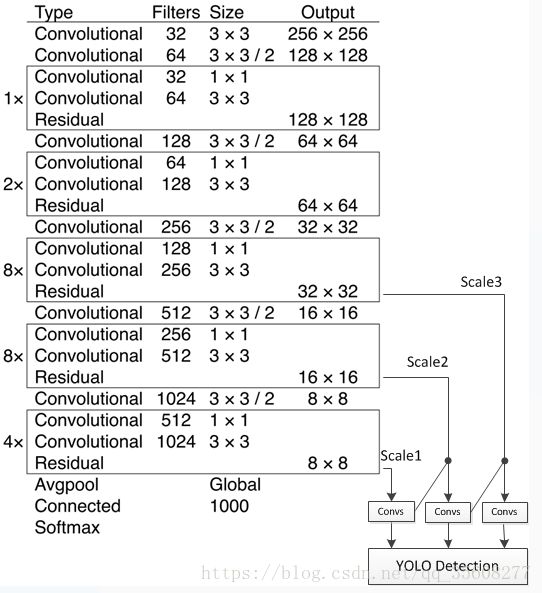
多尺度: YOLOv3预测3种不同尺度的框(boxes),每个尺度的3个框,所以,
张量为N×N×[3 *(4 + 1 + 80)]。
网络会在预测三种尺度的特征N分别为13,26,52,分别对应各三种anchor
(116×90); (156×198); (373×326)
(30×61);(62×45); (59×119);
(10×13);(16×30);(33×23);(大尺度用小anchor,提高小目标识别能力)
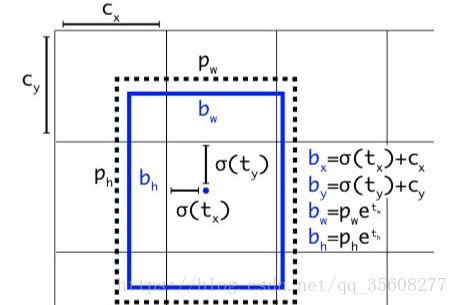
预测tx ty tw th
- 对tx和ty进行sigmoid,并加上对应的offset(下图Cx, Cy)
- 对th和tw进行exp,并乘以对应的锚点值
- 对tx,ty,th,tw乘以对应的步幅,即:416/13, 416 ⁄ 26, 416 ⁄ 52
- 最后,使用sigmoid对Objectness和Classes confidence进行sigmoid得到0~1的概率,之所以用sigmoid取代之前版本的softmax,原因是softmax会扩大最大类别概率值而抑制其他类别概率值
layer filters size input output
0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32
1 conv 64 3 x 3 / 2 416 x 416 x 32 -> 208 x 208 x 64
2 conv 32 1 x 1 / 1 208 x 208 x 64 -> 208 x 208 x 32
3 conv 64 3 x 3 / 1 208 x 208 x 32 -> 208 x 208 x 64
4 Shortcut Layer: 1
5 conv 128 3 x 3 / 2 208 x 208 x 64 -> 104 x 104 x 128
6 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64
7 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128
8 Shortcut Layer: 5
9 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64
10 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128
11 Shortcut Layer: 8
12 conv 256 3 x 3 / 2 104 x 104 x 128 -> 52 x 52 x 256
13 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
14 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
15 Shortcut Layer: 12
16 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
17 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
18 Shortcut Layer: 15
19 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
20 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
21 Shortcut Layer: 18
22 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
23 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
24 Shortcut Layer: 21
25 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
26 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
27 Shortcut Layer: 24
28 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
29 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
30 Shortcut Layer: 27
31 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
32 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
33 Shortcut Layer: 30
34 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
35 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
36 Shortcut Layer: 33
37 conv 512 3 x 3 / 2 52 x 52 x 256 -> 26 x 26 x 512
38 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
39 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
40 Shortcut Layer: 37
41 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
42 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
43 Shortcut Layer: 40
44 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
45 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
46 Shortcut Layer: 43
47 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
48 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
49 Shortcut Layer: 46
50 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
51 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
52 Shortcut Layer: 49
53 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
54 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
55 Shortcut Layer: 52
56 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
57 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
58 Shortcut Layer: 55
59 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
60 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
61 Shortcut Layer: 58
62 conv 1024 3 x 3 / 2 26 x 26 x 512 -> 13 x 13 x1024
63 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
64 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
65 Shortcut Layer: 62
66 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
67 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
68 Shortcut Layer: 65
69 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
70 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
71 Shortcut Layer: 68
72 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
73 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
74 Shortcut Layer: 71
75 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
76 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
77 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
78 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
79 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512
80 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024
81 conv 18 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 18
82 detection
83 route 79
84 conv 256 1 x 1 / 1 13 x 13 x 512 -> 13 x 13 x 256
85 upsample 2x 13 x 13 x 256 -> 26 x 26 x 256
86 route 85 61
87 conv 256 1 x 1 / 1 26 x 26 x 768 -> 26 x 26 x 256
88 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
89 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
90 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
91 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256
92 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512
93 conv 18 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 18
94 detection
95 route 91
96 conv 128 1 x 1 / 1 26 x 26 x 256 -> 26 x 26 x 128
97 upsample 2x 26 x 26 x 128 -> 52 x 52 x 128
98 route 97 36
99 conv 128 1 x 1 / 1 52 x 52 x 384 -> 52 x 52 x 128
100 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
101 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
102 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
103 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128
104 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256
105 conv 18 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 18
106 detection
region层:参数anchors指定kmeans计算出来的anchor box的长宽的绝对值(与网络输入大小相关),num参数为anchor box的数量,
另外还有bias_match,classes,coords等参数.在parser.c代码中的parse_region函数中解析这些参数,并保存在region_layer.num参数保存在l.n变量中;anchors保存在l.biases数组中.region_layer的前向传播中使用for(n = 0; n < l.n; ++n)这样的语句,因此,如果在配置文件中anchors的数量大于num时,仅使用前num个,小于时内存越界.
region层的输入和输出大小与前一层(1x1 conv)的输出大小和网络的输入大小相关.
Detection层: 坐标及类别结果输出层.
使用k-means聚类来确定我们的边界框的先验。我们只是选择了9个聚类(clusters)和3个尺度(scales),然后在整个尺度上均匀分割聚类。在COCO数据集上,9个聚类是:(10×13);(16×30);(33×23);(30×61);(62×45); (59×119); (116×90); (156×198); (373×326)。
训练
https://blog.csdn.net/weixin_42078618/article/details/87787919
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[..., 0:2], from_logits=True)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh - raw_pred[..., 2:4])
confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) + \
(1 - object_mask) * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) * ignore_mask
class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[..., 5:], from_logits=True)
函数一共分为四部分
(1)计算xy(物体中心坐标)的损失
object_mask就是置信度
box_loss_scale可以理解为2-w*h
raw_true_xy就是真实的xy坐标点了
raw_pred[…, :2]是xy预测坐标点
所以第一个式子想对还挺直观,简化为:
bool是置信度
其中bce是xy值的二值交叉熵损失,这个值越小整个损失值越小
bool*(2-areaPred)的值越小,则需要在确保置信度(bool)的情况下,areaPred需要越大
因此,这部分损失主要优化xy的预测值(bce)和置信度(bool)以及wh回归值(areaPred)
(2)计算wh(anchor长宽回归值)的损失
跟(1)式 的差距就在最后一项,所以我们直接简化之:
在确保置信度(bool)的情况下,areaPred需要越大,wh需要尽可能靠近真实值wh
这部分主要优化置信度(bool)wh回归值(areaPred、whTrue)
(3)计算置信度损失(前背景)损失
confidence_loss:
YOLOv2中,总共有845个anchor_boxes,与true_boxes匹配的用于预测pred_boxes,未与true_boxes匹配的anchor_boxes用于预测background。
objects_loss(true_boxes所匹配的anchor_boxes)
与true_boxes所匹配的anchor_boxes去和预测的pred_boxes计算objects_loss。
no_objects_loss(true_boxes未匹配的anchor_boxes)
1、未与true_boxes所匹配的anchor_boxes中,若与true_boxes的IOU>0.6,则无需计算loss。
2、未与true_boxes所匹配的anchor_boxes中,若与true_boxes的IOU<0.6,则计算no_objects_loss。
jianshu.com/p/032b1eecb335
简化为:
其中bool为置信度,bce为预测值和实际置信度的二值交叉熵,ignore表示iou低于一定阈值的但确实存在的物体,相当于frcnn中的中性点位,既不是前景也不是背景,是忽略的,暂时不计的。
在确保置信度(bool)的情况下,预测值需要尽可能靠近真实值,同时没有物体的部分需要尽可能靠近背景真实值,同时乘以相应的需要忽略点位
这部分主要优化置信度,同时缩减了检测的目标量级
(4)计算类别损失
这个不用多说了,直接就是置信度乘上个多分类的交叉熵
这部分优化置信度损失和类别损失
(5)最后,总损失为所有损失之和相加
xy_loss = K.sum(xy_loss) / mf
wh_loss = K.sum(wh_loss) / mf
confidence_loss = K.sum(confidence_loss) / mf
class_loss = K.sum(class_loss) / mf
loss += xy_loss + wh_loss + confidence_loss + class_loss
训练
https://blog.csdn.net/shanlepu6038/article/details/84778770
使用多尺度训练,大量的data augmentation,batch normalization
ref
http://www.cnblogs.com/makefile/p/YOLOv3.html
https://blog.csdn.net/qq_37541097/article/details/81214953