PyTorch学习之 torch.optim 的6种优化器及优化算法介绍
import torch
import torch.nn.functional as F
import torch.utils.data as Data
import matplotlib.pyplot as plt
import numpy as np
1. 结合PyTorch中的optimizer谈几种优化方法
这6种方法分为2大类:一大类方法是SGD及其改进(加Momentum);另外一大类是Per-parameter adaptive learning rate methods(逐参数适应学习率方法),包括AdaGrad、RMSProp、Adam等。
1.1 SGD(stochastic gradient descent)
当训练数据N很大时,计算总的cost function来求梯度代价很大,所以一个常用的方法是计算训练集中的小批量(minibatches),这就是SGD。
minibatch的大小是一个超参数,通常使用2的指数,是因为在实际中许多向量化操作实现的时候,如果输入数据量是2的倍数,那么运算更快。
SGD的缺点:
(1)Very slow progress along shallow dimension, jitter along steep direction
(2)到local minima 或者 saddle point会导致gradient为0,无法移动。而事实上,saddle point 问题在高维问题中会更加常见。
PyTorch中的SGD:
torch.optim.SGD(params, lr=<required parameter>, momentum=0, dampening=0, weight_decay=0, nesterov=False)
参数:
- params (iterable):iterable of parameters to optimize or dicts defining parameter groups
- lr (float):learning rate
- momentum (float, optional):momentum factor (default: 0)
- weight_decay (float, optional):weight decay (L2 penalty) (default: 0)即L2regularization,选择一个合适的权重衰减系数λ非常重要,这个需要根据具体的情况去尝试,初步尝试可以使用
1e-4或者1e-3 - dampening (float, optional):dampening for momentum (default: 0)
- nesterov (bool, optional):enables Nesterov momentum (default: False)
1.2 SGD+Momentum
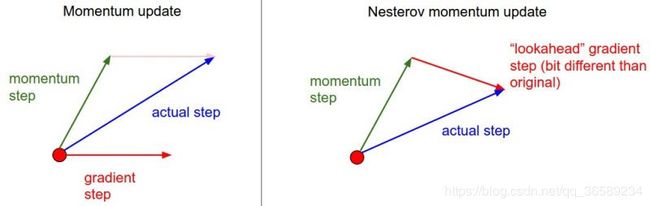
在SGD中,gradient类比成速度(矢量),learning rate类比成时间。Momentum update(动量更新)就是我不仅要看当前时所在位置的速度向量,还要看上一步的速度(梯度),两个向量相加才是我想要的速度矢量:
# Momentum update
v = mu * v - learning_rate * dx # integrate velocity
x += v # integrate position
在这里引入了一个初始化为0的变量v和一个超参数mu。说得不恰当一点,这个变量(mu)在最优化的过程中被看做动量(一般值设为0.9),
但其物理意义与摩擦系数ρ更一致。这个变量有效地抑制了速度,降低了系统的动能,不然质点在山底永远不会停下来。通过交叉验证,这个参数通常设为[0.5,0.9,0.95,0.99]中的一个。
和学习率随着时间退火类似,Momentum 随时间变化的设置有时能略微改善最优化的效果,其中动量在学习过程的后阶段会上升。一个典型的设置是刚开始将动量设为0.5而在后面的多个周期(epoch)中慢慢提升到0.99。
PyTorch中的 SGD with momentum 已经在optim.SGD中的参数momentum中实现,顺便提醒一下PyTorch中的momentum实现机制和其他框架略有不同:SGD with Momentum/Nesterov
1.3 Nesterov Momentum
Nesterov Momentum实际上是拿着上一步的速度先走一小步,再看当前的梯度然后再走一步。
Nesterov Momentum 与 普通Momentum 的区别:
x_ahead = x + mu * v
# evaluate dx_ahead (the gradient at x_ahead instead of at x)
v = mu * v - learning_rate * dx_ahead
x += v
既然我们知道动量将会把我们带到绿色箭头指向的点(x + mu * v),我们就不要在原点(红色点)那里计算梯度了。使用Nesterov动量,我们计算x + mu * v的梯度而不是“旧”位置x的梯度。
在PyTorch中,通过参数nesterov=True 来实现Nesterov Momentum。
1.4 AdaGrad
AdaGrad、RMSProp、Adam都属于Per-parameter adaptive learning rate methods(逐参数适应学习率方法):之前的方法是对所有的参数都是一个学习率,现在对不同的参数有不同的学习率。
# Assume the gradient dx and parameter vector x
cache += dx**2
x += ‐ learning_rate * dx / (np.sqrt(cache) + eps)
注意,变量cache的尺寸和梯度矩阵的尺寸是一样的,还保持记录每个参数的梯度的平方和。
cache将用来归一化参数更新步长,归一化是逐元素进行的。注意,接收到较大梯度值的权重更新的学习率将减小,而接收到较小梯度值的
权重的学习率将会变大。
有趣的是平方根的操作非常重要,如果去掉,算法的表现将会糟糕很多。用于平滑的式子eps(一般设为1e-4到1e-8之间)是防止出现除以0的情况。
Adagrad的一个缺点是:在深度学习中单调的学习率被证明通常过于激进且过早停止学习。
PyTorch中的用法:
torch.optim.Adagrad(params, lr=0.01, lr_decay=0, weight_decay=0, initial_accumulator_value=0)
参数:
- params (iterable) – iterable of parameters to optimize or dicts defining parameter groups
- lr (float, optional) – learning rate (default: 1e-2)
- lr_decay (float, optional) – learning rate decay (default: 0)
- weight_decay (float, optional) – weight decay (L2 penalty) (default: 0)
1.5 RMSProp
cache = decay_rate * cache + (1 ‐ decay_rate) * dx**2
x += ‐ learning_rate * dx / (np.sqrt(cache) + eps)
RMSProp简单修改了Adagrad方法,它做了一个梯度平方的滑动平均(it uses a moving average of squared gradients instead).
在上面的代码中,decay_rate是一个超参数,常用的值是[0.9,0.99,0.999]。
x+=和Adagrad中是一样的,但是cache变量是不同的。因此,RMSProp仍然是基于梯度的大小来对每个权重的学习率进行修改,这同样效果不错。但是和Adagrad不同,其更新不会让学习率单调变小.
个人觉得,RMSProp相较于Adagrad的优点是在鞍点等地方,它在鞍点呆的越久,学习率会越大。
PyTorch中的用法:
torch.optim.RMSprop(params, lr=0.01, alpha=0.99, eps=1e-08, weight_decay=0, momentum=0, centered=False)
参数:
- params (iterable) – iterable of parameters to optimize or dicts defining parameter groups
- lr (float, optional) – learning rate (default: 1e-2)
- momentum (float, optional) – momentum factor (default: 0)
- alpha (float, optional) – smoothing constant (default: 0.99)
- eps (float, optional) – term added to the denominator to improve numerical stability (default: 1e-8)
- centered (bool, optional) – if True, compute the centered RMSProp, the gradient is normalized by an estimation of its variance
- weight_decay (float, optional) – weight decay (L2 penalty) (default: 0)
1.6 Adam
Adam看起来像是RMSProp的Momentum版,简化代码如下:
m = beta1*m + (1‐beta1)*dx
v = beta2*v + (1‐beta2)*(dx**2)
x += ‐ learning_rate * m / (np.sqrt(v) + eps)
Adam看起来真的和RMSProp很像,除了使用的是平滑版的梯度m,而不是用的原始梯度向量dx。
论文中推荐的参数值eps=1e-8, beta1=0.9, beta2=0.999。
在实际操作中,我们推荐Adam作为默认的算法,一般而言跑起来比RMSProp要好一点。但是也可以试试SGD+Nesterov动量。
完整的Adam更新算法也包含了一个偏置(bias)矫正机制,因为m,v两个矩阵初始为0,在没有完全热身之前存在偏差,需要采取一些补偿措施。
PyTorch中的用法:
torch.optim.Adam(params, lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0, amsgrad=False)
参数:
- params (iterable) – iterable of parameters to optimize or dicts defining parameter groups
- lr (float, optional) – learning rate (default: 1e-3)
- betas (Tuple[float, float], optional) – coefficients used for computing running averages of gradient and its square (default: (0.9, 0.999))
- eps (float, optional) – term added to the denominator to improve numerical stability (default: 1e-8)
- weight_decay (float, optional) – weight decay (L2 penalty) (default: 0)
- amsgrad (boolean, optional) – whether to use the AMSGrad variant of this algorithm from the paper On the Convergence of Adam and Beyond (default: False)
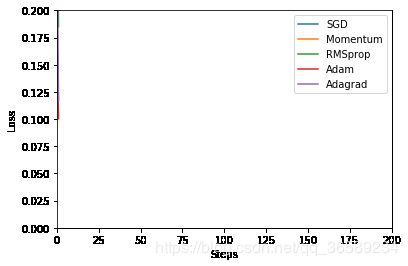
2. 不同优化器的比较
参考莫烦教程
torch.manual_seed(1)
#hyper parameter
Learning_rate = 0.01
Batch_size = 32
Epoch =16
# fake dataset
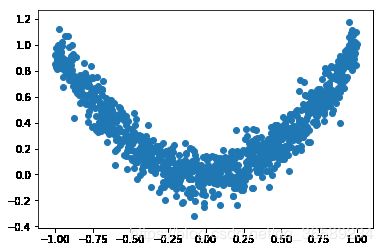
x = torch.unsqueeze(torch.linspace(-1,1,1000),dim=1)
y = x.pow(2)+0.1*torch.normal(torch.zeros(x.size()[0], 1), torch.ones(x.size()[0], 1))
# plot dataset
plt.scatter(x.numpy(),y.numpy())
plt.show()
# 加载数据
torch_dataset = Data.TensorDataset(x,y)
loader = Data.DataLoader(dataset=torch_dataset,batch_size=Batch_size,shuffle=True)
# 为每一种优化器创建一个神经网络
class Net(torch.nn.Module):
def __init__(self):
super().__init__()
self.hidden = torch.nn.Linear(1,20)
self.predict = torch.nn.Linear(20,1)
def forward(self,x):
x = F.relu(self.hidden(x))
x = self.predict(x)
return x
net_SGD = Net()
net_Momentum = Net()
net_RMSprop = Net()
net_Adam = Net()
net_Adagrad = Net()
nets = [net_SGD,net_Momentum,net_RMSprop,net_Adam,net_Adagrad]
# 创建不同的优化器用来训练不同的网络
opt_SGD = torch.optim.SGD(net_SGD.parameters(),lr=Learning_rate)
opt_Momentum = torch.optim.SGD(net_Momentum.parameters(),lr=Learning_rate,momentum=0.8,nesterov=True)
opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(),lr=Learning_rate,alpha=0.9)
opt_Adam = torch.optim.Adam(net_Adam.parameters(),lr=Learning_rate,betas=(0.9,0.99))
opt_Adagrad = torch.optim.Adagrad(net_Adagrad.parameters(),lr=Learning_rate)
optimizers = [opt_SGD,opt_Momentum,opt_RMSprop,opt_Adam,opt_Adagrad]
criterion = torch.nn.MSELoss()
losses_his = [[],[],[],[],[]] # 记录 training 时不同神经网络的 loss
# training and plot
for epoch in range(Epoch):
for step, (b_x, b_y) in enumerate(loader):
for net,opt,l_his in zip(nets,optimizers,losses_his):
output = net(b_x)
loss=criterion(output,b_y)
opt.zero_grad()
loss.backward()
opt.step()
l_his.append(loss.data.numpy())
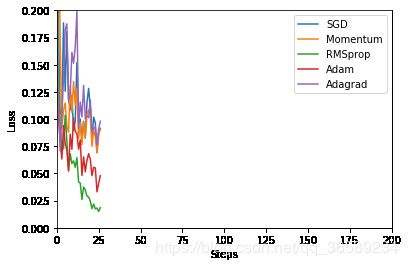
if step%25 == 1 and epoch%7==0:
labels = ['SGD', 'Momentum', 'RMSprop', 'Adam','Adagrad']
for i, l_his in enumerate(losses_his):
plt.plot(l_his, label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0, 0.2))
plt.xlim((0, 200))
print('epoch: {}/{},steps:{}/{}'.format(epoch+1,Epoch,step*Batch_size,len(loader.dataset)))
plt.show()
epoch: 1/16,steps:32/1000
epoch: 1/16,steps:832/1000
epoch: 8/16,steps:32/1000

epoch: 8/16,steps:832/1000

epoch: 15/16,steps:32/1000

epoch: 15/16,steps:832/1000
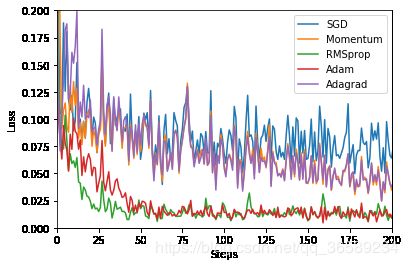
一个有趣的现象是Adagrad和Momentum走势非常相似,有空可以思考一下。
3. 直观看不同优化方法的动态学习过程
图片版权: Alec Radford
第一张图是损失函数的等高线:
第二张图是在鞍点处的学习情况,注意SGD很难突破对称性,一直卡在顶部。而RMSProp之类的方法能够看到马鞍方向有很低的梯度。因为在RMSProp更新方法中的分母项,算法提高了在该方向的有效学习率,使得RMSProp能够继续前进: