wolfram实现小阿尔法狗(含python版)
众所周知,wolfram直提供了深度学习实例中的图像识别与语音识别等,对于强化学习与深度强化学习的案例暂时没有,这不免打击了许多同学去学习wolfram的信心。
大家别怕,这东西超简单,我们可以运用自己的理解进行创造与尝试,而不需要完全硬套模板。但是经过本人一下午的鼓捣,发现还是没有办法查看wolfram损失层定义的标准接口和内部方法,所以我尝试过猜测的接口类型去自己写loss function,不过证实都是接口不匹配的,并不能被其标准函数NetTrain认为是一个网络层。于是我只能很难受地采用其内置的loss函数。经过细心探索,wolfram并不允许你修改底层,神经网络所有的部件都是这样,大概只让你组合起来使用,不允许加入新的东西或自定义的网络层结构。综合来说,目前的wolfram比较适合竞赛和学习,对于科研依旧存在缺乏一定的开发性。当然如果未来wolfram开放了,或许情况就不一样了。如果是已经开放了只是我没有办法了解到其底层代码,请知晓的同仁帮忙告知我一声,谢谢。
本次我们尝试做一只阿尔法狗一代的孙子。
- 首先我们解释一下,阿尔法狗的一个简单逻辑(和真正的一代狗仍有区别,这里是一个简化后的用于通俗说明的版本):
我们需要定义一个未来收益函数benefit(s,a)
该函数表示,在s状态下,狗儿采取a(action)行动所带来的未来收益。在围棋中游戏中,s便是当前棋局,a表示即将进行的一手棋,benefit则表示在当前局势下,狗儿来a这么一手所对应的胜率。
所以狗儿需要做的是,求出能够带来最大benefit的a,也就是算出接下来这一手棋该怎么下。 arg max a b e n e f i t ( s , a ) \arg \max _{a} benefit\left( s,a\right) argamaxbenefit(s,a)
所以其实,阿尔法狗如果不是下棋机的话,修改一下她的benefit定义就好了。
由于很遗憾,无法修改loss函数所以,我只能把狗儿变成狼了(浪~)
我使用的benefit是且只好是均方差函数,然后任务变成,求在特定s下,可以使均方差最小的a。如果要求最大,定义loss是前面加负号就好了,可惜这里做不到,只能委屈大家先看求最小值的这只狼。
好了,以下是wolfram的代码(整理过,所以比较干净)

在深度学习部分,我只是使用了非常简单的几个线性层和非线性层,因为发现loss的修改计划被强行阉割之后,完全没有兴趣去设计复杂网络结构,因为这狼本来也干不了什么大事了。其内在的网络结构图:
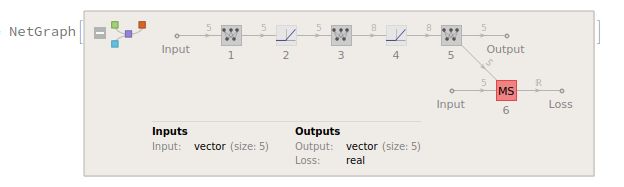
从图中或者代码中可以清楚的看见,我们的数据是没有标签的,即无监督。我们通过当次的benefit去定制的loss函数中,得到自己的一个参数更新机会。此处因选择均方差,所以需要输入输出被限制成统一size,实际上,这个state和action的形式可以差别很大,因为定制loss会解决这个问题。就像交叉熵就是典型处理分类问题的loss函数,其输入之间的size就是不一样的。形式不重要,因为具体形式也要取决与具体用途。
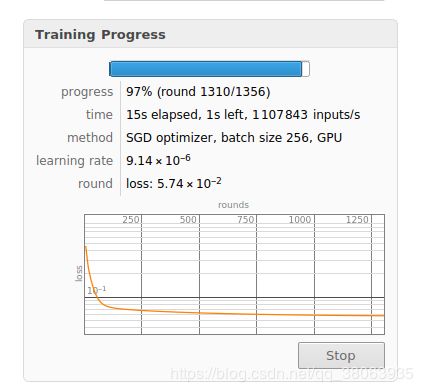
然后我们就开始训练咯。
最后我们试一下结果

当然常规的狗在验证这个环节都是有理论最优的参考的,这里的话,大家可以自行去算理论最优(我没给你x的显示值,你也算不了,因为不希望大家入坑浪费时间)
然后解释一下最后的输出值,他们就是狼儿算出来在x下可以使得本次实例的benefit最小的一组action(a)值。虽然我在内心里一直觉得,这些actions有xx任何一点价值吗?怪自己手欠,开了博文的头,就停不下来了。
然后,我们看看Python的吧,从这里我发现,要设计啥的,暂时还是得回归Python这个老朋友(虽然曾经一度被我多次抛弃)
import torch
import torch.nn as nn
import torch.cuda
class AlphaGo(nn.Module):
def __init__(self):
super(AlphaGo, self).__init__()
self.alpha1 = nn.Linear(3, 8)
self.alpha2 = nn.LeakyReLU()
self.alpha3 = nn.Linear(8, 8)
self.alpha4 = nn.LeakyReLU()
self.alpha5 = nn.Linear(8, 1)
def forward(self, x):
out = self.alpha1(x)
out = self.alpha2(out)
out = self.alpha3(out)
out = self.alpha4(out)
out = self.alpha5(out)
return out
net = AlphaGo().cuda()
def benefit(s, a):
s0, s1, s2 = s[:, 0] ** 0, s[:, 1] ** 1, s[:,2] ** 2
a0 = a[:, 0]
return (s0 + s1 + s2) * a0 - a0 * a0 - s0 * s1 * s2
optimizer = torch.optim.SGD(net.parameters(), 0.00005)#lr最好别高于0.00005,不然就算着算着就算没了,,,如果你使用Adam则当我没说。
for step in range(10000):
optimizer.zero_grad()
s = torch.randn(10000,3).cuda()
a = net(s)
cerition = benefit(s, a)
loss = -torch.sum(cerition)#取相反数求最大,,,具体道理大家都懂。
loss.backward()
optimizer.step()
if step % 500 == 0:
print('step: %4d | loss: %.4f'%(step, loss))
s_t = torch.randn(2, 3).cuda()
print('x for test:', s_t)
a_t = net(s_t)
print('AlphaGO\'s result:', a_t)
print('value of benefit :', benefit(s_t, a_t))
def argmax_a_benefit(s):
s0, s1, s2 = s[:, 0] ** 0, s[:, 1] ** 1, s[:,2] ** 2
return 0.5 * (s0 + s1 + s2)[:, None]
theory_a = argmax_a_benefit(s_t)
print('theoretical best value', theory_a)
print('value of benefit:', benefit(s_t, theory_a))
这里呢,虽然也不是什么下棋的benefit(因为我不会围棋啊,,,)但是可以简扼地说明我想表达的东西。
其运行结果如图:

大家可以发现,稍微训练了一下,狗给出的action和理论最优就已经挺接近了。
好了,这次就到这里,,,吃饭去了,,,