http://blog.csdn.net/u010723709/article/details/48007881
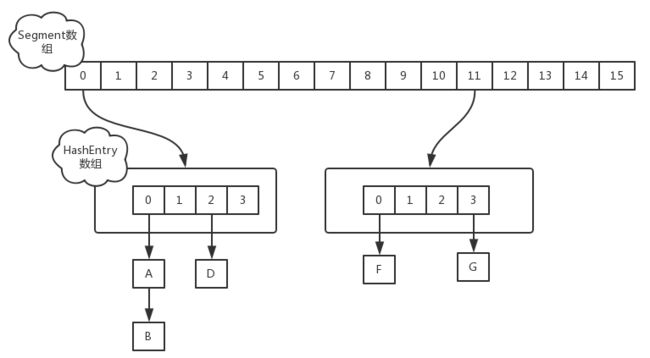
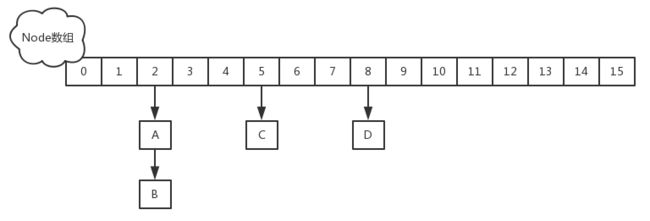
ConcurrentHashMap在1.8版本摒弃了Segment(锁段)的概念,而是启用了一种全新的CAS算法的方式实现,Node + CAS + Synchronized。数据结构沿用了与它同时期的HashMap版本的思想,底层依然由数组+链表+红黑树的方式思想。
ConcurrentHashMap的Key和Value不允许null值
ConcurrentHashmap和Hashtable都是支持并发的,这样会有一个问题,当你通过get(k)获取对应的value时,如果获取到的是null时,你无法判断,它是put(k,v)的时候value为null,还是这个key从来没有做过映射。
HashMap是非并发的,可以通过contains(key)来做这个判断。
而ConcurrentHashMap在调用m.containsKey(key)和m.get(key),这两个方法都是没有加锁的,调用时候m可能被其他线程改变了。
假如一个线程m.containsKey(k)为真,在还没执行m.get(k)的时候,k被另外一个线程给删除了,那么m.get(k)会返回null。如果允许null值的话,就会错误的判断为k还存在;因此不允许null值的话就可以正常的表示出当前的k是不存在的。所以在ConcurrentHashMap不应该有如下的写法,Key和Value不允许null值。
其实Value不允许null值就可以,Key为null似乎没什么影响,作者一起排除null我也不知道什么原因。
if (m.containsKey(k)) {
return m.get(k);
} else {
throw new KeyNotPresentException();
}
重点变量sizeCtl
-1:正在初始化
-(1+正在进行扩容操作的线程数):正在进行扩容操作
0:默认值,表示table还未进行初始化
正数:表示下一次进行扩容的大小,这一点类似于扩容阈值的概念。还后面可以看到,它的值始终是当前ConcurrentHashMap容量的0.75倍,这与loadfactor是对应的。
/**
* 盛装Node元素的数组 它的大小是2的整数次幂
* Size is always a power of two. Accessed directly by iterators.
*/
transient volatile Node[] table;
/**
* Table initialization and resizing control. When negative, the
* table is being initialized or resized: -1 for initialization,
* else -(1 + the number of active resizing threads). Otherwise,
* when table is null, holds the initial table size to use upon
* creation, or 0 for default. After initialization, holds the
* next element count value upon which to resize the table.
hash表初始化或扩容时的一个控制位标识量。
负数代表正在进行初始化或扩容操作
-1代表正在初始化
-N 表示有N-1个线程正在进行扩容操作
正数或0代表hash表还没有被初始化,这个数值表示初始化或下一次进行扩容的大小
*/
private transient volatile int sizeCtl;
// 以下两个是用来控制扩容的时候 单线程进入的变量
/**
* The number of bits used for generation stamp in sizeCtl.
* Must be at least 6 for 32bit arrays.
*/
private static int RESIZE_STAMP_BITS = 16;
/**
* The bit shift for recording size stamp in sizeCtl.
*/
private static final int RESIZE_STAMP_SHIFT = 32 - RESIZE_STAMP_BITS;
/*
* Encodings for Node hash fields. See above for explanation.
*/
static final int MOVED = -1; // hash值是-1,表示这是一个forwardNode节点
static final int TREEBIN = -2; // hash值是-2 表示这时一个TreeBin节点
重点类
Node是最核心的内部类,它包装了key-value键值对,所有插入ConcurrentHashMap的数据都包装在这里面。它与HashMap中的定义很相似,但是但是有一些差别它对value和next属性设置了volatile同步锁,它不允许调用setValue方法直接改变Node的value域,它增加了find方法辅助map.get()方法。
static class Node implements Map.Entry {
final int hash;
final K key;
volatile V val;//带有同步锁的value
volatile Node next;//带有同步锁的next指针
Node(int hash, K key, V val, Node next) {
this.hash = hash;
this.key = key;
this.val = val;
this.next = next;
}
public final K getKey() { return key; }
public final V getValue() { return val; }
public final int hashCode() { return key.hashCode() ^ val.hashCode(); }
public final String toString(){ return key + "=" + val; }
//不允许直接改变value的值
public final V setValue(V value) {
throw new UnsupportedOperationException();
}
public final boolean equals(Object o) {
Object k, v, u; Map.Entry e;
return ((o instanceof Map.Entry) &&
(k = (e = (Map.Entry)o).getKey()) != null &&
(v = e.getValue()) != null &&
(k == key || k.equals(key)) &&
(v == (u = val) || v.equals(u)));
}
/**
* Virtualized support for map.get(); overridden in subclasses.
*/
Node find(int h, Object k) {
Node e = this;
if (k != null) {
do {
K ek;
if (e.hash == h &&
((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
} while ((e = e.next) != null);
}
return null;
}
}
这个Node内部类与HashMap中定义的Node类很相似,但是有一些差别
它对value和next属性设置了volatile同步锁
它不允许调用setValue方法直接改变Node的value域
它增加了find方法辅助map.get()方法
put
如果一个或多个线程正在对ConcurrentHashMap进行扩容操作,当前线程也要进入扩容的操作中。这个扩容的操作之所以能被检测到,是因为transfer方法中在空结点上插入forward节点,如果检测到需要插入的位置被forward节点占有,就帮助进行扩容;
如果检测到要插入的节点是非空且不是forward节点,就对这个节点加锁,这样就保证了线程安全。尽管这个有一些影响效率,但是还是会比HashTable的synchronized要好得多。
putVal(K key, V value, boolean onlyIfAbsent)方法干的工作如下:
1、检查key/value是否为空,如果为空,则抛异常,否则进行2
2、进入for死循环,进行3
3、检查table是否初始化了,如果没有,则调用initTable()进行初始化然后进行 2,否则进行4
4、根据key的hash值计算出其应该在table中储存的位置i,取出table[i]的节点用f表示。
根据f的不同有如下三种情况:
1)如果table[i]==null(即该位置的节点为空,没有发生碰撞),
则利用CAS操作直接存储在该位置,如果CAS操作成功则退出死循环。
2)如果table[i]!=null(即该位置已经有其它节点,发生碰撞),碰撞处理也有两种情况
2.1)检查table[i]的节点的hash是否等于MOVED,如果等于,则检测到正在扩容,则帮助其扩容
2.2)说明table[i]的节点的hash值不等于MOVED,如果table[i]为链表节点,则将此节点插入链表中即可
3 ) 如果table[i]为树节点,则将此节点插入树中即可。插入成功后,进行 5
5、如果table[i]的节点是链表节点,则检查table的第i个位置的链表是否需要转化为数,如果需要则调用treeifyBin函数进行转化
1、第一步根据给定的key的hash值找到其在table中的位置index。
2、找到位置index后,存储进行就好了。
只是这里的存储有三种情况罢了,第一种:table[index]中没有任何其他元素,即此元素没有发生碰撞,这种情况直接存储就好了哈。第二种,table[i]存储的是一个链表,如果链表不存在key则直接加入到链表尾部即可,如果存在key则更新其对应的value。第三种,table[i]存储的是一个树,则按照树添加节点的方法添加就好。
public V put(K key, V value) {
return putVal(key, value, false);
}
/** Implementation for put and putIfAbsent */
final V putVal(K key, V value, boolean onlyIfAbsent) {
//不允许 key或value为null
if (key == null || value == null) throw new NullPointerException();
//计算hash值
int hash = spread(key.hashCode());
int binCount = 0;
//死循环 何时插入成功 何时跳出
for (Node[] tab = table;;) {
Node f; int n, i, fh;
//如果table为空的话,初始化table
if (tab == null || (n = tab.length) == 0)
tab = initTable();
//根据hash值计算出在table里面的位置
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
//如果这个位置没有值 ,直接放进去,不需要加锁
if (casTabAt(tab, i, null,
new Node(hash, key, value, null)))
break; // no lock when adding to empty bin
}
//当遇到表连接点时,需要进行整合表的操作
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
//结点上锁 这里的结点可以理解为hash值相同组成的链表的头结点
synchronized (f) {
if (tabAt(tab, i) == f) {
//fh〉0 说明这个节点是一个链表的节点 不是树的节点
if (fh >= 0) {
binCount = 1;
//在这里遍历链表所有的结点
for (Node e = f;; ++binCount) {
K ek;
//如果hash值和key值相同 则修改对应结点的value值
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node pred = e;
//如果遍历到了最后一个结点,那么就证明新的节点需要插入 就把它插入在链表尾部
if ((e = e.next) == null) {
pred.next = new Node(hash, key,
value, null);
break;
}
}
}
//如果这个节点是树节点,就按照树的方式插入值
else if (f instanceof TreeBin) {
Node p;
binCount = 2;
if ((p = ((TreeBin)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
//如果链表长度已经达到临界值8 就需要把链表转换为树结构
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
//将当前ConcurrentHashMap的元素数量+1
addCount(1L, binCount);
return null;
}
在putVal函数,出现了如下几个函数
1、casTabAt tabAt 等CAS操作
2、initTable 作用是初始化table数组
3、treeifyBin 作用是将table[i]的链表转化为树
Unsafe与CAS
在ConcurrentHashMap中,随处可以看到U, 大量使用了U.compareAndSwapXXX的方法,这个方法是利用一个CAS算法实现无锁化的修改值的操作,他可以大大降低锁代理的性能消耗。这个算法的基本思想就是不断地去比较当前内存中的变量值与你指定的一个变量值是否相等,如果相等,则接受你指定的修改的值,否则拒绝你的操作。因为当前线程中的值已经不是最新的值,你的修改很可能会覆盖掉其他线程修改的结果。这一点与乐观锁,SVN的思想是比较类似的。
unsafe代码块控制了一些属性的修改工作,比如最常用的SIZECTL 。 在这一版本的concurrentHashMap中,大量应用来的CAS方法进行变量、属性的修改工作。 利用CAS进行无锁操作,可以大大提高性能。
ConcurrentHashMap定义了三个原子操作,用于对指定位置的节点进行操作。正是这些原子操作保证了ConcurrentHashMap的线程安全。
//获得在i位置上的Node节点
static final Node tabAt(Node[] tab, int i) {
return (Node)U.getObjectVolatile(tab, ((long)i << ASHIFT) + ABASE);
}
//利用CAS算法设置i位置上的Node节点。之所以能实现并发是因为他指定了原来这个节点的值是多少
//在CAS算法中,会比较内存中的值与你指定的这个值是否相等,如果相等才接受你的修改,否则拒绝你的修改
//因此当前线程中的值并不是最新的值,这种修改可能会覆盖掉其他线程的修改结果 有点类似于SVN
static final boolean casTabAt(Node[] tab, int i,
Node c, Node v) {
return U.compareAndSwapObject(tab, ((long)i << ASHIFT) + ABASE, c, v);
}
//利用volatile方法设置节点位置的值
static final void setTabAt(Node[] tab, int i, Node v) {
U.putObjectVolatile(tab, ((long)i << ASHIFT) + ABASE, v);
}
扩容
http://www.importnew.com/23907.html
整个扩容操作分为两个部分
第一部分是构建一个nextTable,它的容量是原来的两倍,这个操作是单线程完成的。这个单线程的保证是通过RESIZE_STAMP_SHIFT这个常量经过一次运算来保证的,这个地方在后面会有提到;
第二个部分就是将原来table中的元素复制到nextTable中,这里允许多线程进行操作。
原理:多线程遍历节点,处理了一个节点,就把对应点的值set为forward,另一个线程看到ForwardingNode节点,就向后遍历。
JDK1.8改进
不采用segment而采用node,锁住node来实现减小分段锁粒度。
设计了MOVED状态,允许多线程进行帮助扩容操作。
使用3个CAS操作来确保node的一些操作的原子性,这种方式代替了锁。
sizeCtl的不同值来代表不同含义,起到了控制的作用。