-1.
朴实无华,且枯燥。

0.
感觉 KTHx - ID2203.1x 和 KTHx - ID2203.2x Reliable Distributed Algorithms 的公开课蛮有意思,无奈实在受不了老师的口音,只是把教材《Introduction to Reliable and Secure Distributed Programming》看了一遍,所以简单记个笔记。
注意:这本书的核心内容,并不是教你实现分布式系统,而是抽象分布式系统,给你一套分析、构建分布式系统的方法。
1. 基本的抽象
分布式系统可以抽象为两部分:1. process:执行计算的模块;2. link:支持 process 之间通信的网络。

为了描述分布式算法,本书定义了一种 asynchronous event-based composition 模型,每个 process 运行一组软件组件,这里称之为 modules。
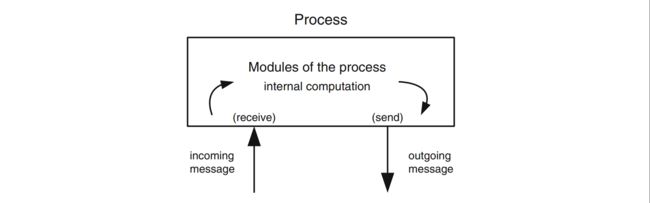
本地软件栈中的组件以 event 异步通信,保证 FIFO 顺序;不同 process 之间的组件也是以 event 通信,信道属性依赖 link 抽象。
组件之间传递的 event 分为两类:Request 和 Indication。
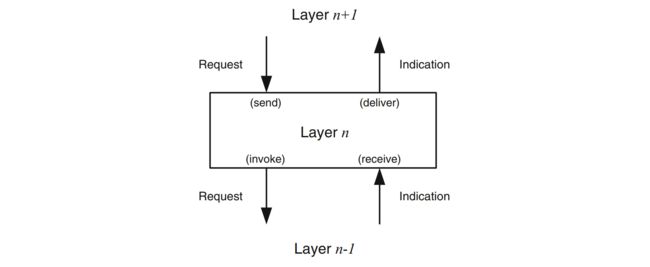
设计的分布式算法最终可以细化为一个个 module,每个 module 需要定义接收的 Request 事件和发出的 Indication 事件,声明需要满足的 Properties,这些属性分为两类:1. Safety 不能违反的属性;2. Liveness 最终会达成的属性。通俗来说也就是坏事不会发生,好事最终会发生。
比较复杂的分布式算法需要组合多个 module,你可能会说这样在性能上会有折扣,不如端到端整体设计算法,但是优秀的抽象可以帮助你分析问题,避免问题过于复杂带来的 bug。如果最终需要做性能优化,那么现有的抽象也有助于正确的优化逻辑。
1.1. 对 Process 进行抽象
对 process 最重要的抽象是定义故障:
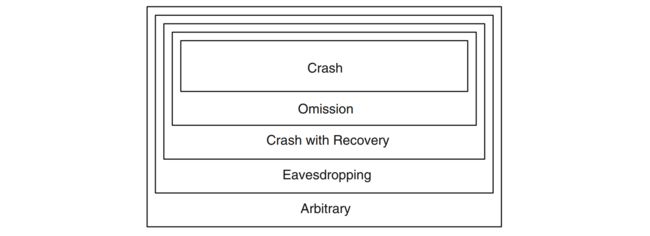
- 对故障最严格的定义就是 Crash,process 停止工作,不再恢复。
- 相对更一般的故障是 Omission,也就是丢消息。
- 相对更一般的故障是 Crash with Recovery,也就是假设一个可靠存储,process crash 之后可以从可靠存储恢复状态。该故障更一般体现在:a. 通常来说 process 无法完整保存所有的状态;b. 当 process 恢复之后无法判断发送给上层 module 的事件是否已经处理了。
- 相对更一般的故障是 Eavesdropping,这就进入不可信的环境了,消息有可能被窃取重放,通常来说可以用密码学解决这些问题。
- 最一般的故障是 Arbitrary,故障的 process 会发送异常的消息,该故障也被称为 Byzantine 问题。
由于笔者能力有限,对本书中基于Arbitrary故障的讲述基本忽略。
1.2. 对 Communication 进行抽象
上面提到本书用 link 抽象分布式系统中的通信组件,信道肯定会丢消息,所以首先定义一个最弱的 link 抽象 —— FairLossPointToPointLinks

也就是大家普遍认知的信道,相比 FairLossPointToPointLinks 更可靠的信道抽象为 StubbornPointToPointLinks,简单来说就是接收方会收到消息,但是收到消息的次数没有限制。

对于 crash-stop process 抽象,很容易基于 FairLossPointToPointLinks 设计实现 StubbornPointToPointLinks 的算法。
这里有点儿绕,为什么设计 link 抽象的算法要假设 process 抽象?因为这部分算法是 process 执行的逻辑,所以本书中所有算法都得提前假设 process 抽象,有些 module 只是针对某种 process 抽象定义的,也有些 module 在某些 process 抽象下是无法实现的。
下面定义一个更理想化的抽象 PerfectPointToPointLinks
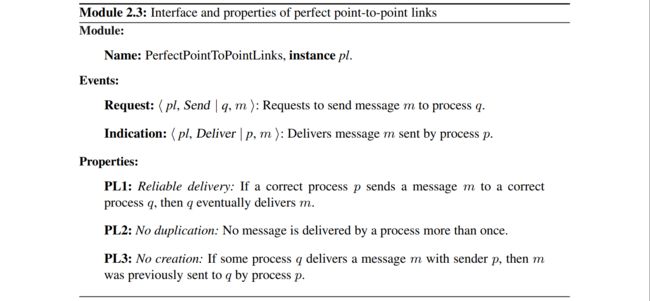
消息可以可靠的传输,并且不会重复,也不会无中生有。
PerfectPointToPointLinks 也是基于 crash-stop process 抽象定义的,下面再基于 crash-recovery process 抽象定义一个理想化的 link 抽象:LoggedPerfectPointToPointLinks
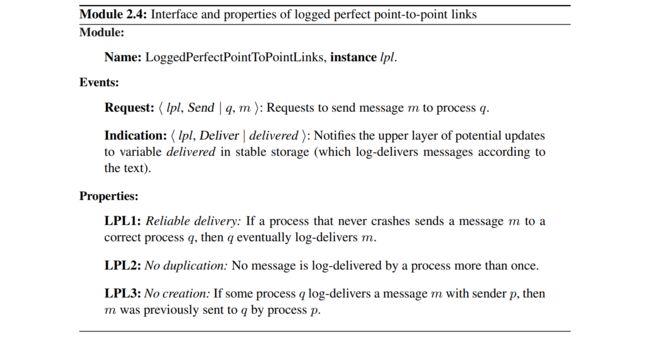
属性要求基本一样,我们把两个算法放在一起看,就能很直观的理解到:process 抽象假设不同,算法设计也会差别很大。

在本书中对于 crash-stop process 抽象默认假设 PerfectPointToPointLinks,对于 crash-recovery process 抽象默认假设 LoggedPerfectPointToPointLinks,当然有些算法会基于比较接近实际通信信道的 FairLossPointToPointLinks 设计,原因是上层也需要重传与去重的逻辑,所以不需要在下层重复实现。
1.3. 对 Time 进行抽象
接下来还需要对 Time 进行抽象,假设 link 的通信延迟和 process 的处理速度,在本书中将 Time 抽象为 failure-detector。
基于时间假设可以将分布式分为三类:
- Asynchronous System:异步系统对 process 和 link 不做任何时间假设,该系统使用 logical clock 测量时间。
顺便提一下,经典的 FLP Impossibility 定理就是基于异步系统假设得出的结论。
- Synchronous System:同步系统明确给出 a. 处理延迟假设,b. 消息传输延迟上限,c. 本地物理时钟与 global real-time clock 偏差上限。
- Partial System:通常来说分布式系统大部分时间是同步的,但是偶尔也会是异步的,这个接近现实的系统称为 partially synchronous 的。可以这样理解 partial synchrony:时间假设最终是可以满足的,但是无法确定确切的时间。
所以在 synchronous system 中,对于 crash-stop process 抽象,可以基于 timeout 精确检测故障,这可以抽象为 PerfectFailureDetector

在 partial system 中,属性限制需要放宽一些: EventuallyPerfectFailureDetector

再对比着看一下两者在 crash-stop process 抽象中的实现。

通常来说,在分布式系统中需要的不仅仅是识别出故障的 process,而是选出一个没有故障的 process,这个 process 可以做为 leader 协调整个系统。
在此同样定义 synchronous 和 partial system 两个版本。
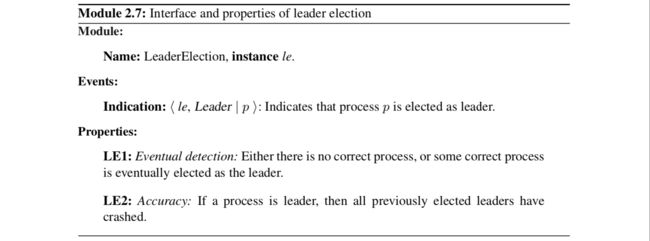

基于对应的 FailureDetector 很容易实现 crash-stop process 抽象中的 LeaderDetector

对于 EventualLeaderDetector,也可以在 crash-recovery process 抽象中实现。

1.4. Distributed-System Models
以上定义了三个基本抽象:1. process 抽象,2. link 抽象,3. failure-detector 抽象。组合这三个基本抽象定义分布式系统模型。
| 系统模型 | process抽象 | link抽象 | failure-detector抽象 |
|---|---|---|---|
| fail-stop | crash-stop | PerfectPointToPointLinks | PerfectFailureDetector |
| fail-noisy | crash-stop | PerfectPointToPointLinks | EventuallyPerfectFailureDetector/EventualLeaderDetector |
| fail-silent | crash-stop | PerfectPointToPointLinks | X |
| fail-recovery | crash-recovery | StubbornPointToPointLinks | EventualLeaderDetector |
| fail-arbitrary | fail-arbitrary | AuthPerfectPointToPointLinks | X |
另外还有一个比较特别的系统模式——Randomized,该模型下的算法不需要确定性,只是实现某种概率抽象,这可以理解为确定性算法的补充。
设计容错算法有一个常用的工具—— quorum,指的是系统中 N 个 process 的大多数,也就是超过 N/2 个 process,如果故障的数量 f < N/2,那么至少有一个 quorum 里都是正常的 process。
对于 arbitrary-fault 进程抽象情况稍微复杂一点儿,可以容忍 f 个故障的 Byzantine quorum 需要超过 (N+f)/2,如何理解这个不等式呢?两个 Byzantine quorum 加起来得超过 N+f,其中重叠的数量才能大于 f 个,也就是会重叠一个正常的 process。另外需要正常的数量 N-f 超过 quorum 数量 (N+f)/2,也就是 N > 3f,所以容忍 Byzantine 故障需要故障数 f < N/3,结合上面两个不等式得出 quorum 数量大于 2f,也就是Byzantine quorum 中的大多数都是正常 process。
本书也使用 Big-O Notation 定义算法的时间复杂度 —— O(g(N)),其中N指的是系统中 process 的数量,另外这里数的不再是指令,而是消息、通信步骤和持久化存储访问。
2. Reliable Broadcast
上一章对分布式系统进行了抽象和定义,有了这个基础就很容易开始具体算法之旅啦~
2.1 crash-stop process 抽象下的算法
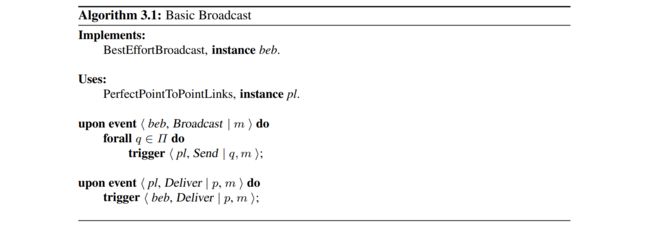
首先从最基础的广播开始,最弱的尽最大努力广播—— BestEffortBroadcast
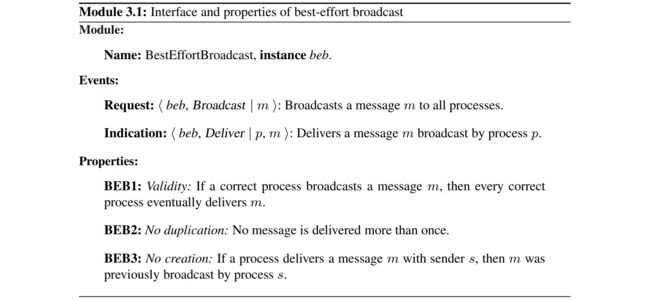
在 fail-silent 模型中很容易实现,只需要一个通信步骤,交换 O(N) 消息。
下面定义一个可靠的广播,如果某些正常的 process 收到了消息 m,那么最终所有正常的 process 都会收到消息 m。

这个 module 可以在 fail-stop 和 fail-silent 模型中分别实现。

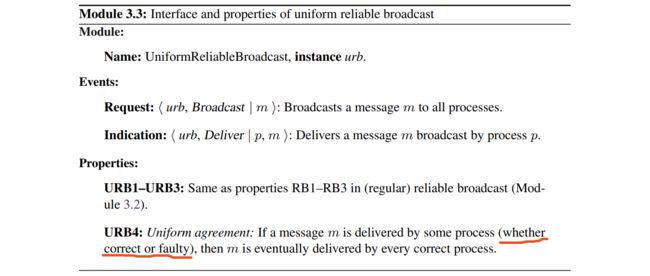
下面定义一个更可靠的广播,无论正常还是故障的 process 收到消息 m,最终都会可靠广播给所有正常 process —— UniformReliableBroadcast

2.2 crash-recovery process 抽象下的算法
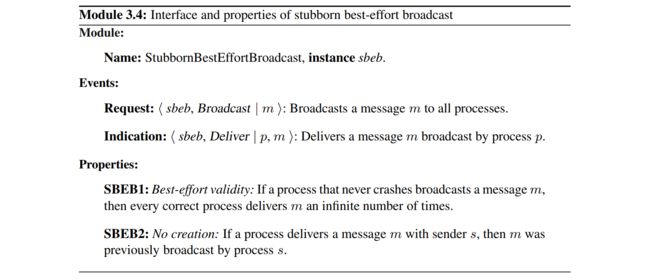
对于 crash-recovery process 抽象,首先需要定义一个比较弱的广播 —— StubbornBestEffortBroadcast
在 fail-recovery 模型中的实现。

fail-recovery 模型中对应的尽最大努力广播 —— LoggedBestEffortBroadcast


fail-recovery 模型中对应的可靠广播 —— LoggedUniformReliableBroadcast


2.3 randomized 模型下的算法
上述算法有个很大的问题,由于消息量是 O(N^2) 级别的,一旦系统规模扩大,系统性能将会急速下降。
传统的解决思路可以将系统设计为等级体系的模式,但是带来的问题将会超过获得的收益,所以可以另辟蹊径试一下随机性的方法。


这个算法的缺点是耗费了大量无效的消息传输,实际上可以优化为两个阶段:首先传染性的 push-style 传播,当大部分 process 都被感染之后改为 pulling 机制。

2.4 有顺序的广播
以上的广播算法都是没有顺序关系的,下面定义更高级的有顺序关系的广播。
首先是 FIFO 顺序的广播 —— FIFOReliableBroadcast

增加一个序列号很容易在 fail-silent 模型中实现。

causal-order 要实现的更复杂,整个系统中每个 process 收到的消息要具有同样的 happened-before 关系。

一个实现思路是将所有有序的消息在每次广播的时候都附带上。

在 fail-stop 模型中可以对消息列表进行垃圾回收。

另外还有一种不需要存储、传递所有消息列表的方法,这用到了一个巧妙的数据结构 —— vector clock
顺便提一下这个算法的理论基础是 Leslie Lamport 奠定的,可以膜拜一下大师在 1978 年的论文 Time, Clocks, and the Ordering of Events in a Distributed System

简单来说就是每个消息附加一个向量时钟,根据时钟就能建立偏序关系。

3. Shared Memory
这一章更深入一些,定义分布式“共享内存”。
首先定义一个最简单的,只有一个 process 可以执行写操作。

该 module 可以在 fail-stop 和 fail-silent 模型分别实现。

下面给写操作加上原子性,简单来说就是一旦某个 process 读到了新的数据,那么其他 process 不能再读到旧数据。
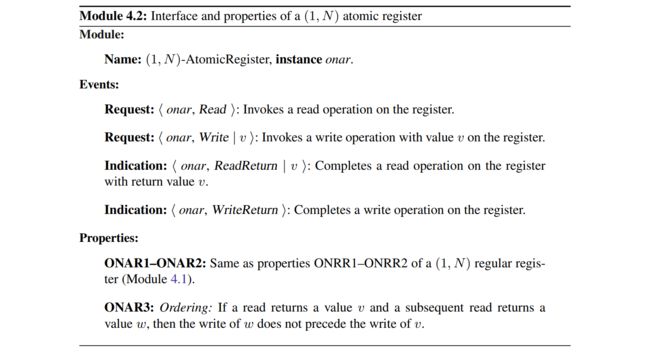
可以基于 ONRR 实现 ONAR,分两步:1. 基于 ONRR 实现 OOAR,2. 基于 OOAR 实现 ONAR。
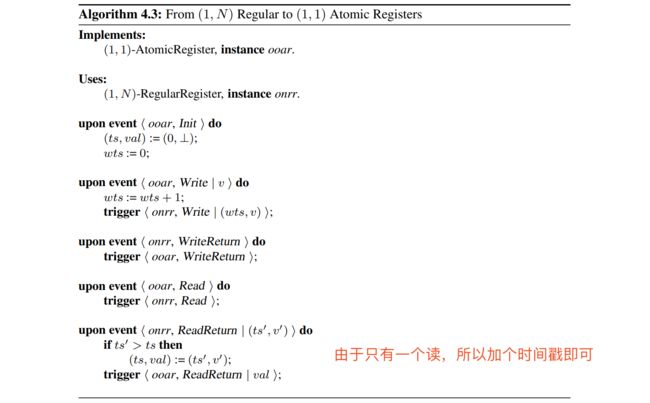
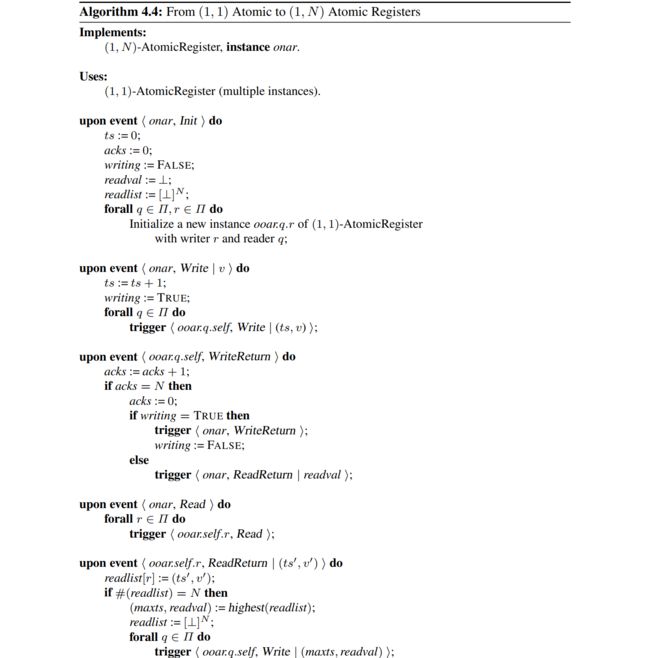
第一次遇到这种多实例的,配个图就好理解了。

这个算法的问题就是性能比较差,每次写操作需要 N 个 OOAR,每次读操作也需要 N 个 OOAR。
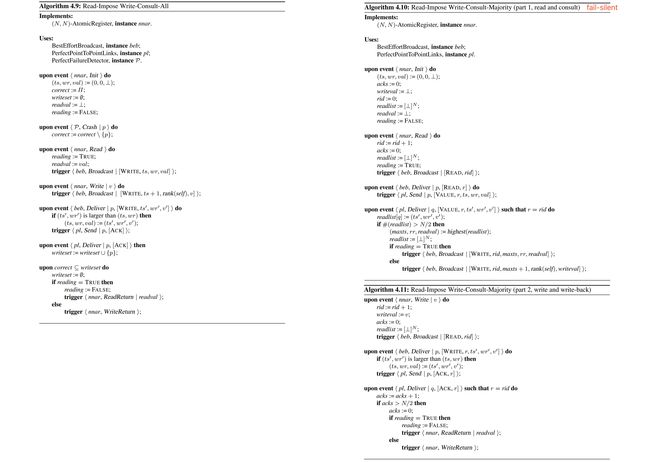
实际上上面的算法既迂回有性能低,还不如直接设计算法。

以上都是一个 process 执行写操作,下面放宽限制允许 N 个 process 执行写操作。

首先想到的也是基于 ONAR 来实现。

缺点也是性能低,所以再来直接设计。
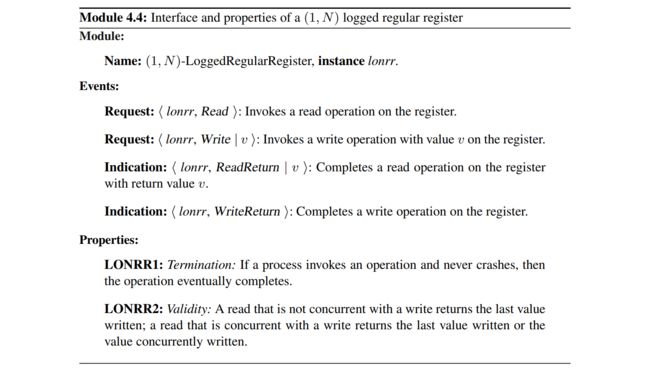
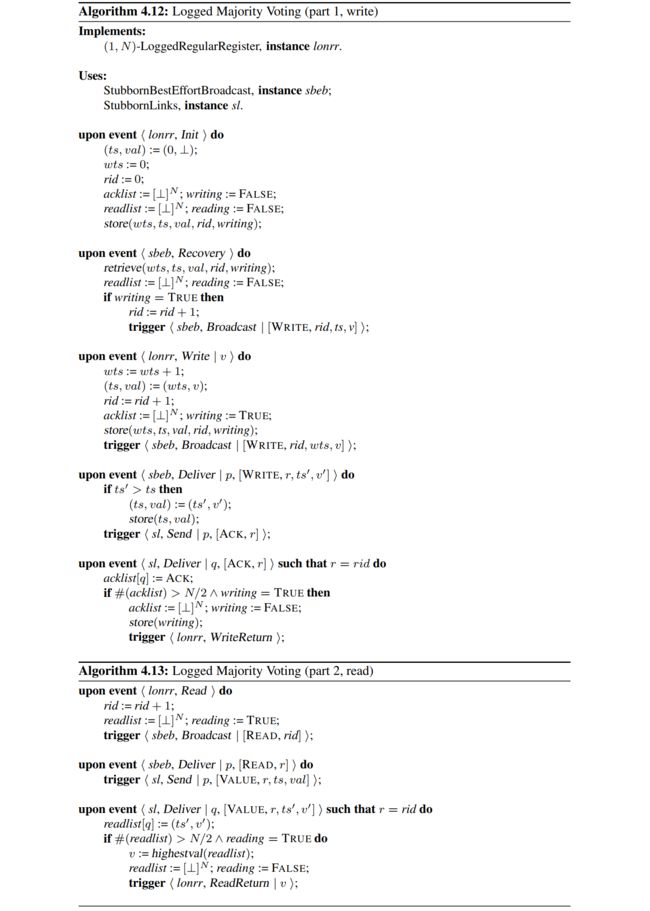
最后看一下 fail-recovery 模型中的 ONRR。
这一章的 Register 抽象,感觉遇到的比较少,所以笔记也比较省略。
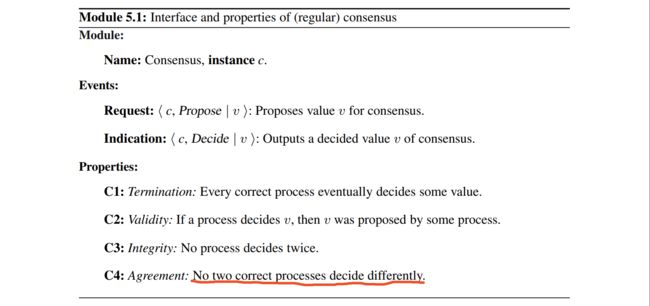
4. Consensus
接下来就是重点问题 —— Consensus。
4.1. Regular Consensus
首先在 fail-stop 模型下实现。
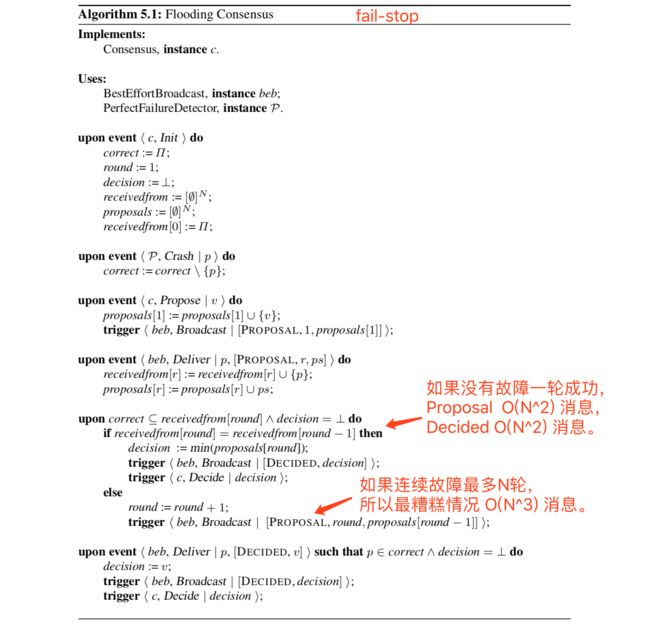
Flooding Consensus 的缺点就是消息量太大,可以通过级联的模式优化消息量。

4.2. Uniform Consensus
接下来加强一下 Consensus 中的 Agreement 属性,无论 process 正常与否,都决定相同的数据。

可以使用上一节中相同的思路在 fail-stop 模型中实现。

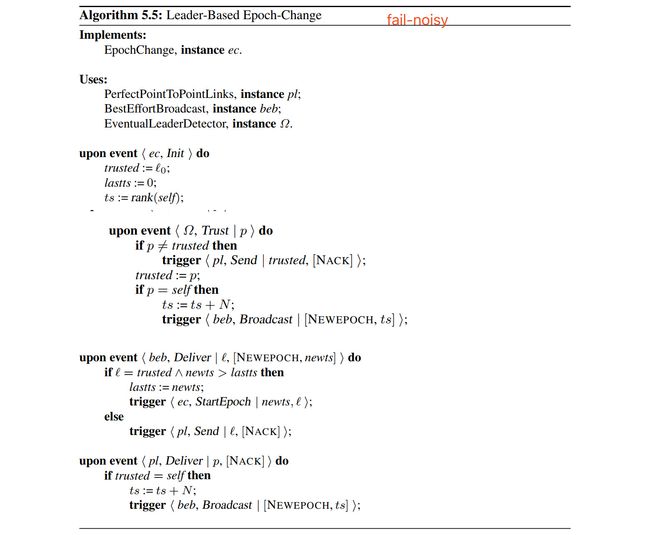
4.3 在 Fail-Noisy 模型中实现 Uniform Consensus
上述都是在 fail-stop 模型中的实现,离现实中的分布式系统相去较远,这一小节尝试在 fail-noisy 模型中实现。
需要假设故障数 f < N/2,由于没有 Synchronous System 假设,无法精确的确定一个 leader 协调 consensus 过程,所以这里引入一个 epochs 的概念,在每个 epoch 中选出一个可能的 leader 协调 Consensus 过程。
首先定义 epoch-change 抽象,为整个系统触发 epoch 序列。

可以基于 EventualLeaderDetector 来实现。
然后定义 epoch consensus 抽象,在一个 epoch 中协调 Consensus 过程。


组合 EpochChange 和 EpochConsensus 就可以实现 UniformConsensus
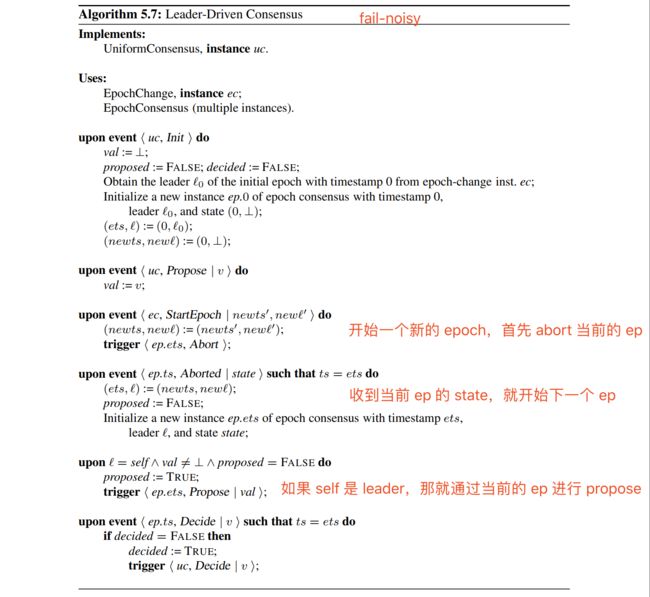
可以结合下面的例子进行理解,每个 epoch 会确定一个 leader 进行 propose,每次 consensus 的过程就是 EpochConsensus,如果开始新的 epoch 那就 abort 当前的 Consensus 过程,再开始新的一轮 EpocConsensus。
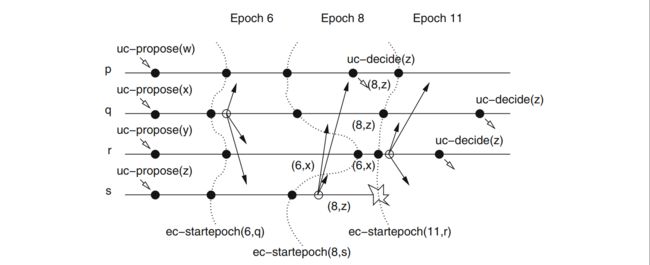
顺便提一下,Leader-Driven Consensus 算法就是 Paxos 算法形式化的表述,可以对照着 Lamport 故事化的表述再看一下。《The Part-Time Parliament》
4.4 Logged Consensus
基于 fail-noisy 模型实现 fail-recovery 模型下的 Consensus 还是比较简单的。

相对于 UniformConsensus 少了 Integrity,原因是恢复的过程中上层 module 可能会 propose 多次,所以也会 log-decide 多次。
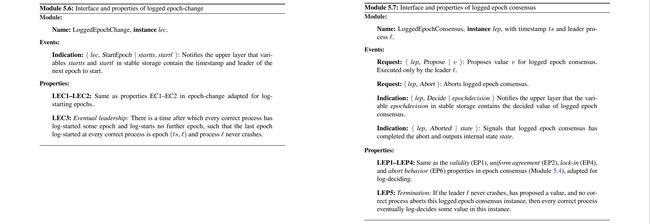
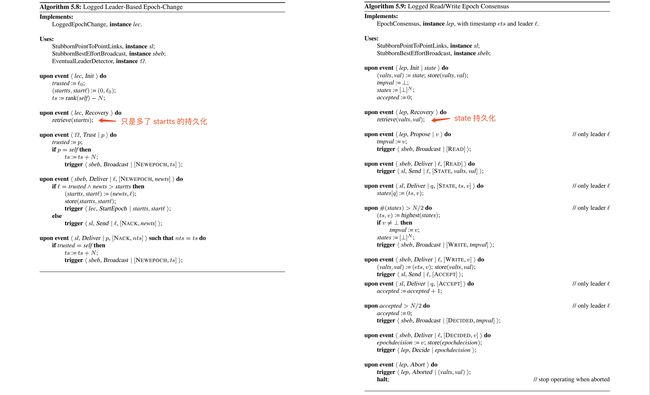
同样的需要 LoggedEpochChange 和 LoggedEpochConsensus

5. Consensus Variants
这一章介绍几个 Consensus 的变种,原因是 Consensus 抽象层次比较高,所以再定义几个比较贴近实际使用的抽象。
5.1. Total-Order Broadcast
前面介绍过 FIFO-order 和 causal-order 的广播,这里再定义一个 total-order 的广播。

基于 Consensus 抽象来实现,逻辑很直观。
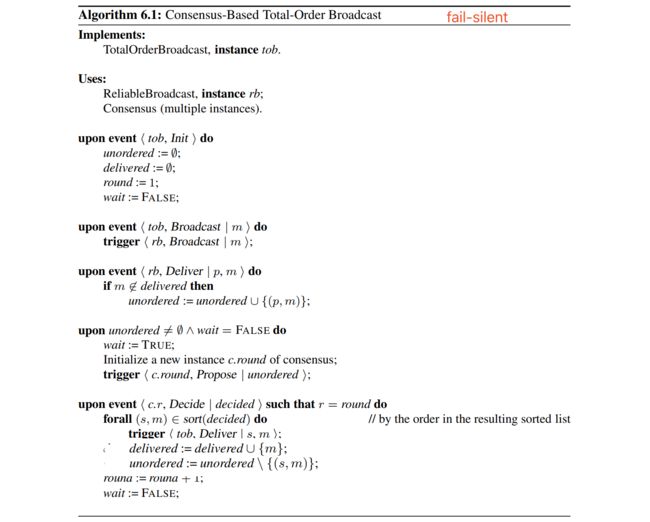
将 Consensus 改为 UniformConsensus 就是 UniformTotalOrderBroadcast 的实现。
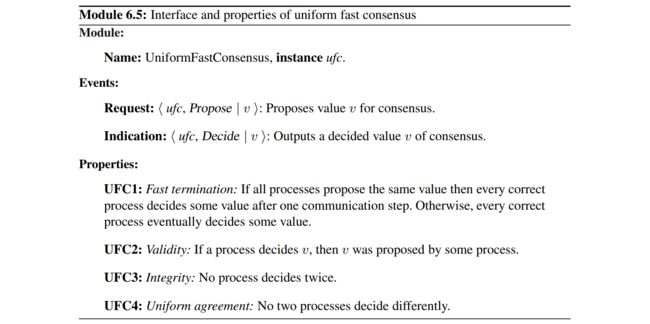
5.2. Fast Consensus
对 Consensus 的一个小优化,对于大部分 p 拥有相同 proposal value 的情况,许多通信是可以省略的。

5.3 Nonblocking Atomic Commit
分布式事务的原子性提交也需要依赖 Consensus 实现


读后感
这本书还是很博大精深,方方面面都介绍到了。坦白说,看完一遍具体的算法细节可能没有完全掌握,但是本书一以贯之的方法论发人深省,帮助很大。