排序与搜索
排序算法(英语:Sorting algorithm)是一种能将一串数据依照特定顺序进行排列的一种算法。
十大经典排序算法
排序算法的稳定性
稳定性:稳定排序算法会让原本有相等键值的纪录维持相对次序。也就是如果一个排序算法是稳定的,当有两个相等键值的纪录R和S,且在原本的列表中R出现在S之前,在排序过的列表中R也将会是在S之前。
当相等的元素是无法分辨的,比如像是整数,稳定性并不是一个问题。然而,假设以下的数对将要以他们的第一个数字来排序。
(4, 1) (3, 1) (3, 7)(5, 6)在这个状况下,有可能产生两种不同的结果,一个是让相等键值的纪录维持相对的次序,而另外一个则没有:
(3, 1) (3, 7) (4, 1) (5, 6) (维持次序)
(3, 7) (3, 1) (4, 1) (5, 6) (次序被改变)不稳定排序算法可能会在相等的键值中改变纪录的相对次序,但是稳定排序算法从来不会如此。不稳定排序算法可以被特别地实现为稳定。作这件事情的一个方式是人工扩充键值的比较,如此在其他方面相同键值的两个对象间之比较,(比如上面的比较中加入第二个标准:第二个键值的大小)就会被决定使用在原先数据次序中的条目,当作一个同分决赛。然而,要记住这种次序通常牵涉到额外的空间负担。
一、冒泡排序
冒泡排序(英语:Bubble Sort)是一种简单的排序算法。它重复地遍历要排序的数列,一次比较两个元素,如果他们的顺序错误就把他们交换过来。遍历数列的工作是重复地进行直到没有再需要交换,也就是说该数列已经排序完成。这个算法的名字由来是因为越小的元素会经由交换慢慢“浮”到数列的顶端。
冒泡排序算法的运作如下:
- 比较相邻的元素。如果第一个比第二个大(升序),就交换他们两个。
- 对每一对相邻元素作同样的工作,从开始第一对到结尾的最后一对。这步做完后,最后的元素会是最大的数。
- 针对所有的元素重复以上的步骤,除了最后一个。
- 持续每次对越来越少的元素重复上面的步骤,直到没有任何一对数字需要比较。
1.1 冒泡排序的分析
交换过程图示(第一次):
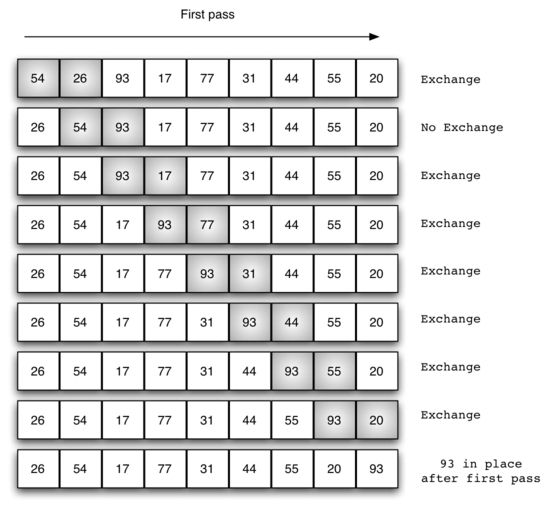
那么我们需要进行n-1次冒泡过程,每次对应的比较次数如下图所示:

def bubble_sort(alist):
for j in range(len(alist)-1,0,-1):
# j表示每次遍历需要比较的次数,是逐渐减小的
for i in range(j):
if alist[i] > alist[i+1]:
alist[i], alist[i+1] = alist[i+1], alist[i]
li = [54,26,93,17,77,31,44,55,20]
bubble_sort(li)
print(li)1.2 时间复杂度
- 最优时间复杂度:O(n) (表示遍历一次发现没有任何可以交换的元素,排序结束。)
- 最坏时间复杂度:O(n2)
- 稳定性:稳定
1.3 冒泡排序的演示
RUNOOB.com效果:
二、选择排序
选择排序(Selection sort)是一种简单直观的排序算法。它的工作原理如下。首先在未排序序列中找到最小(大)元素,存放到排序序列的起始位置,然后,再从剩余未排序元素中继续寻找最小(大)元素,然后放到已排序序列的末尾。以此类推,直到所有元素均排序完毕。
选择排序的主要优点与数据移动有关。如果某个元素位于正确的最终位置上,则它不会被移动。选择排序每次交换一对元素,它们当中至少有一个将被移到其最终位置上,因此对n个元素的表进行排序总共进行至多n-1次交换。在所有的完全依靠交换去移动元素的排序方法中,选择排序属于非常好的一种。
2.1 选择排序分析
排序过程:


红色表示当前最小值,黄色表示已排序序列,蓝色表示当前位置。
def selection_sort(alist):
n = len(alist)
# 需要进行n-1次选择操作
for i in range(n-1):
# 记录最小位置
min_index = i
# 从i+1位置到末尾选择出最小数据
for j in range(i+1, n):
if alist[j] < alist[min_index]:
min_index = j
# 如果选择出的数据不在正确位置,进行交换
if min_index != i:
alist[i], alist[min_index] = alist[min_index], alist[i]
alist = [54,226,93,17,77,31,44,55,20]
selection_sort(alist)
print(alist)2.2 时间复杂度
- 最优时间复杂度:O(n2)
- 最坏时间复杂度:O(n2)
- 稳定性:不稳定(考虑升序每次选择最大的情况)
2.3 选择排序演示
三、插入排序
插入排序(英语:Insertion Sort)是一种简单直观的排序算法。它的工作原理是通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入。插入排序在实现上,在从后向前扫描过程中,需要反复把已排序元素逐步向后挪位,为最新元素提供插入空间。
3.1 插入排序分析
def insert_sort(alist):
# 从第二个位置,即下标为1的元素开始向前插入
for i in range(1, len(alist)):
# 从第i个元素开始向前比较,如果小于前一个元素,交换位置
for j in range(i, 0, -1):
if alist[j] < alist[j-1]:
alist[j], alist[j-1] = alist[j-1], alist[j]
alist = [54,26,93,17,77,31,44,55,20]
insert_sort(alist)
print(alist)3.2 时间复杂度
- 最优时间复杂度:O(n) (升序排列,序列已经处于升序状态)
- 最坏时间复杂度:O(n2)
- 稳定性:稳定
3.3 插入排序演示
四、快速排序
快速排序(英语:Quicksort),又称划分交换排序(partition-exchange sort),通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比另外一部分的所有数据都要小,然后再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。
步骤为:
- 从数列中挑出一个元素,称为"基准"(pivot),
- 重新排序数列,所有元素比基准值小的摆放在基准前面,所有元素比基准值大的摆在基准的后面(相同的数可以到任一边)。在这个分区结束之后,该基准就处于数列的中间位置。这个称为分区(partition)操作。
- 递归地(recursive)把小于基准值元素的子数列和大于基准值元素的子数列排序。
递归的最底部情形,是数列的大小是零或一,也就是永远都已经被排序好了。虽然一直递归下去,但是这个算法总会结束,因为在每次的迭代(iteration)中,它至少会把一个元素摆到它最后的位置去。
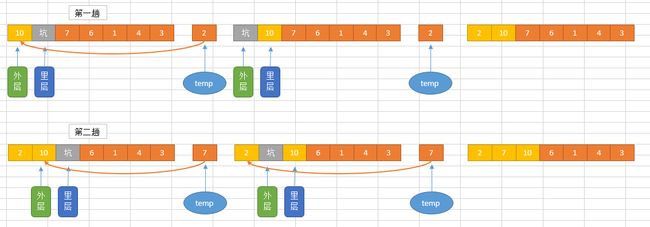
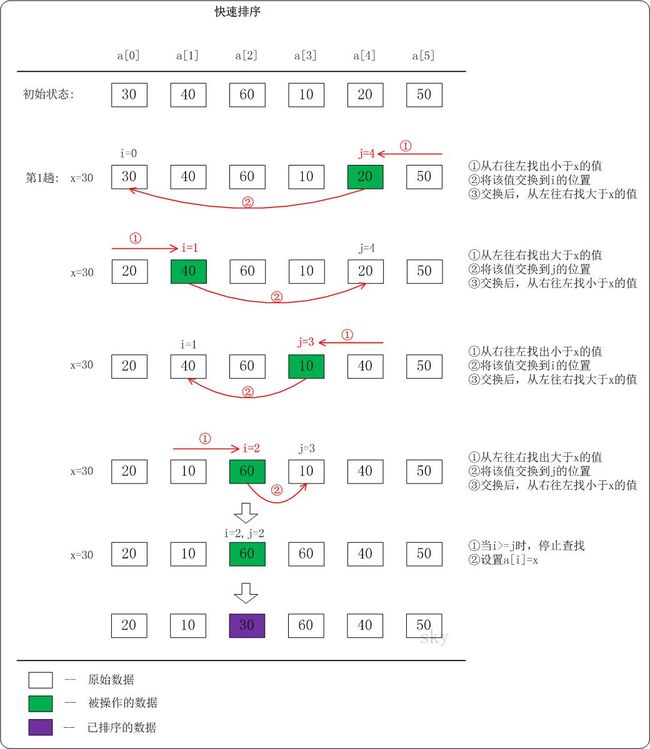
4.1 快速排序的分析
def quick_sort(alist, start, end):
"""快速排序"""
# 递归的退出条件
if start >= end:
return
# 设定起始元素为要寻找位置的基准元素
mid = alist[start]
# low为序列左边的由左向右移动的游标
low = start
# high为序列右边的由右向左移动的游标
high = end
while low < high:
# 如果low与high未重合,high指向的元素不比基准元素小,则high向左移动
while low < high and alist[high] >= mid:
high -= 1
# 将high指向的元素放到low的位置上
alist[low] = alist[high]
# 如果low与high未重合,low指向的元素比基准元素小,则low向右移动
while low < high and alist[low] < mid:
low += 1
# 将low指向的元素放到high的位置上
alist[high] = alist[low]
# 退出循环后,low与high重合,此时所指位置为基准元素的正确位置
# 将基准元素放到该位置
alist[low] = mid
# 对基准元素左边的子序列进行快速排序
quick_sort(alist, start, low-1)
# 对基准元素右边的子序列进行快速排序
quick_sort(alist, low+1, end)
alist = [54,26,93,17,77,31,44,55,20]
quick_sort(alist,0,len(alist)-1)
print(alist)4.2 时间复杂度
- 最优时间复杂度:O(nlogn)
- 最坏时间复杂度:O(n2)
- 稳定性:不稳定
从一开始快速排序平均需要花费O(n log n)时间的描述并不明显。但是不难观察到的是分区运算,数组的元素都会在每次循环中走访过一次,使用O(n)的时间。在使用结合(concatenation)的版本中,这项运算也是O(n)。
在最好的情况,每次我们运行一次分区,我们会把一个数列分为两个几近相等的片段。这个意思就是每次递归调用处理一半大小的数列。因此,在到达大小为一的数列前,我们只要作log n次嵌套的调用。这个意思就是调用树的深度是O(log n)。但是在同一层次结构的两个程序调用中,不会处理到原来数列的相同部分;因此,程序调用的每一层次结构总共全部仅需要O(n)的时间(每个调用有某些共同的额外耗费,但是因为在每一层次结构仅仅只有O(n)个调用,这些被归纳在O(n)系数中)。结果是这个算法仅需使用O(n log n)时间。
4.3 快速排序演示
五、希尔排序
希尔排序(Shell Sort)是插入排序的一种。也称缩小增量排序,是直接插入排序算法的一种更高效的改进版本。希尔排序是非稳定排序算法。该方法因DL.Shell于1959年提出而得名。 希尔排序是把记录按下标的一定增量分组,对每组使用直接插入排序算法排序;随着增量逐渐减少,每组包含的关键词越来越多,当增量减至1时,整个文件恰被分成一组,算法便终止。
5.1 希尔排序过程
希尔排序的基本思想是:将数组列在一个表中并对列分别进行插入排序,重复这过程,不过每次用更长的列(步长更长了,列数更少了)来进行。最后整个表就只有一列了。将数组转换至表是为了更好地理解这算法,算法本身还是使用数组进行排序。
例如,假设有这样一组数[ 13 14 94 33 82 25 59 94 65 23 45 27 73 25 39 10 ],如果我们以步长为5开始进行排序,我们可以通过将这列表放在有5列的表中来更好地描述算法,这样他们就应该看起来是这样(竖着的元素是步长组成):
13 14 94 33 82
25 59 94 65 23
45 27 73 25 39
10然后我们对每列进行排序:
10 14 73 25 23
13 27 94 33 39
25 59 94 65 82
45将上述四行数字,依序接在一起时我们得到:[ 10 14 73 25 23 13 27 94 33 39 25 59 94 65 82 45 ]。这时10已经移至正确位置了,然后再以3为步长进行排序:
10 14 73
25 23 13
27 94 33
39 25 59
94 65 82
45排序之后变为:
10 14 13
25 23 33
27 25 59
39 65 73
45 94 82
94最后以1步长进行排序(此时就是简单的插入排序了)
5.2 希尔排序的分析

def shell_sort(alist):
n = len(alist)
# 初始步长
gap = n / 2
while gap > 0:
# 按步长进行插入排序
for i in range(gap, n):
j = i
# 插入排序
while j>=gap and alist[j-gap] > alist[j]:
alist[j-gap], alist[j] = alist[j], alist[j-gap]
j -= gap
# 得到新的步长
gap = gap / 2
alist = [54,26,93,17,77,31,44,55,20]
shell_sort(alist)
print(alist)5.3 时间复杂度
- 最优时间复杂度:根据步长序列的不同而不同
- 最坏时间复杂度:O(n2)
- 稳定想:不稳定
5.4 希尔排序演示

六、归并排序
归并排序是采用分治法的一个非常典型的应用。归并排序的思想就是先递归分解数组,再合并数组。
将数组分解最小之后,然后合并两个有序数组,基本思路是比较两个数组的最前面的数,谁小就先取谁,取了后相应的指针就往后移一位。然后再比较,直至一个数组为空,最后把另一个数组的剩余部分复制过来即可。
6.1 归并排序的分析

def merge_sort(alist):
if len(alist) <= 1:
return alist
# 二分分解
num = len(alist)/2
left = merge_sort(alist[:num])
right = merge_sort(alist[num:])
# 合并
return merge(left,right)
def merge(left, right):
'''合并操作,将两个有序数组left[]和right[]合并成一个大的有序数组'''
#left与right的下标指针
l, r = 0, 0
result = []
while l6.2 时间复杂度
- 最优时间复杂度:O(nlogn)
- 最坏时间复杂度:O(nlogn)
- 稳定性:稳定
6.3 归并排序效果演示
七、常见排序算法效率比较

7.1 搜索
搜索是在一个项目集合中找到一个特定项目的算法过程。搜索通常的答案是真的或假的,因为该项目是否存在。 搜索的几种常见方法:顺序查找、二分法查找、二叉树查找、哈希查找
7.2 二分法查找
二分查找又称折半查找,优点是比较次数少,查找速度快,平均性能好;其缺点是要求待查表为有序表,且插入删除困难。因此,折半查找方法适用于不经常变动而查找频繁的有序列表。首先,假设表中元素是按升序排列,将表中间位置记录的关键字与查找关键字比较,如果两者相等,则查找成功;否则利用中间位置记录将表分成前、后两个子表,如果中间位置记录的关键字大于查找关键字,则进一步查找前一子表,否则进一步查找后一子表。重复以上过程,直到找到满足条件的记录,使查找成功,或直到子表不存在为止,使查找成功,或直到子表不存在为止,此时查找不成功。

二分法查找实现
7.3.1(非递归实现)
def binary_search(alist, item):
first = 0
last = len(alist)-1
while first<=last:
midpoint = (first + last)/2
if alist[midpoint] == item:
return True
elif item < alist[midpoint]:
last = midpoint-1
else:
first = midpoint+1
return False
testlist = [0, 1, 2, 8, 13, 17, 19, 32, 42,]
print(binary_search(testlist, 3))
print(binary_search(testlist, 13))7.3.2(递归实现)
def binary_search(alist, item):
if len(alist) == 0:
return False
else:
midpoint = len(alist)//2
if alist[midpoint]==item:
return True
else:
if item7.4 时间复杂度
- 最优时间复杂度:O(1)
- 最坏时间复杂度:O(logn)