主要程序参照CSDN上的文章《stm32主从模式定时器产生精确脉冲个数》进行修改,原文是以定时器4作为主模式输出PWM,定时器3作为从模式。在程序上测试后是可行的,只需要再加上定时器3的中断函数来关闭定时器使能即可。
由于项目需求,我这里是用高级定时器1作为主模式,高级定时器和通用定时器有一定的区别。
主要是下面两个设置不太相同:
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //重复计数,一定要=0!!!
TIM_CtrlPWMOutputs(TIM1, ENABLE); //高级定时器一定要加上,主输出使能
之前我没有加上TIM_CtrlPWMOutputs(TIM1, ENABLE)时程序一直没有输出波形,高级定时器中只有加这这句话才能有PWM输出。后来发现进入TIM2的中断函数的时机总是不对,比实际时间长很多,后来加上TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;后解决。
主定时器产生PWM
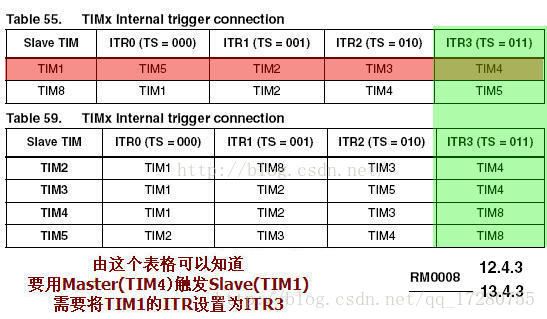
还有就是这里取的是ITR0。
/***定时器1主模式***/
void TIM1_config(u32 Cycle)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_TIM1 , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //TIM1_CH4 PA11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = Cycle-1;
TIM_TimeBaseStructure.TIM_Prescaler =71; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS= Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //重复计数,一定要=0!!!
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = Cycle/2-1; //设置待装入捕获寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
TIM_SelectMasterSlaveMode(TIM1, TIM_MasterSlaveMode_Enable);
TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update);
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
}
/***定时器2从模式***/
void TIM2_config(u32 PulseNum)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = PulseNum-1;
TIM_TimeBaseStructure.TIM_Prescaler =0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_SelectInputTrigger(TIM2, TIM_TS_ITR0);
//TIM_InternalClockConfig(TIM3);
TIM2->SMCR|=0x07; //设置从模式寄存器
//TIM_ITRxExternalClockConfig(TIM2, TIM_TS_ITR0);
//TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_ITConfig(TIM2,TIM_IT_Update,DISABLE);
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void Pulse_output(u32 Cycle,u32 PulseNum)
{
TIM2_config(PulseNum);
TIM_Cmd(TIM2, ENABLE);
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM1_config(Cycle);
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE); //高级定时器一定要加上,主输出使能
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) // TIM_IT_CC1
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除中断标志位
TIM_CtrlPWMOutputs(TIM1, DISABLE); //主输出使能
TIM_Cmd(TIM1, DISABLE); // 关闭定时器
TIM_Cmd(TIM2, DISABLE); // 关闭定时器
TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE);
}
}
#include "delay.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(); //延时函数初始化
uart_init(115200); //串口初始化为115200
Pulse_output(1000,8000);//1KHZ,8000个脉冲
while(1)
{
}
}
在示波器上1k的波形大概8秒后波形消失,符合预期。
输出一定数量PWM脉冲,
主要有几种方法:
1.单脉冲法,需要一个脉冲中断一次,中断次数多,影响效率,而且能保证每次的脉冲连续性么?
2.另一定时器进行中断计数,与1一样,需要频繁中断;
3.用主从定时器门控方式,比较繁琐;
4.高级定时器T1、T8的重复计数方式,RCR计数中断,看手册好像这种方式最简单,能满足一部分人要求,缺点是寄存器只有8位,最多实现255个脉冲计数输出。
参考文章:
(1)门控法
(2)http://www.openedv.com/posts/list/0/42117.htm
(3)高级定时器RCR计数中断,未测试通过!
(4)http://download.csdn.net/download/dreamharding/10168003