
10个工程师,3天造出一辆自动驾驶汽车。当然,他们是靠改装现成的。
如果了解过特斯拉下一阶段的蓝图,你对自动驾驶下的汽车共享前景一定不会陌生。
但打造这样的市场,似乎一直是巨头们游戏。
但Voyage公司的改装成果告诉我们,小团队依然能做出点什么,只要你有足够的热情。
想过有一天,你的爱车也可以实现无人驾驶吗?
这可不是神话!
Voyage公司的几名工程师已经成功用3天时间改造了一辆非常酷的无人驾驶汽车。
一辆典型的自动驾驶汽车主要靠许多不同类型的传感器提供动力。Voyage汽车的传感器选择包括雷达、激光雷达和相机等。有了这些传感器,汽车就能像人类一样感知并浏览周围的世界。
我们有非常强大且多样化的传感器,所以一辆自动驾驶汽车有可能变身一个Superman,代替人类应对各种各样的危险。
在Voyage公司,我们首先需要买一辆福特Fusion,然后使用下列传感器对不同位置进行改装,最终使其成为一辆自动驾驶汽车。
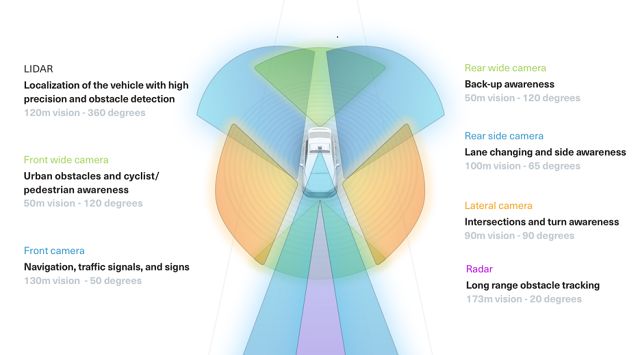
图片翻译:
|激光雷达:高精度的车辆的定位功能和障碍物探测功能,120米视野-360范围。
|前置宽视野摄像头:能够感知城市障碍物和骑自行车者/行人,50米视野-120°范围。
|前置摄像头:导航、交通信号灯和标志,130米视野-50°范围。
|后置宽视野摄像头:察觉后面情况,50米视野-120°范围。
|后侧摄像头:车道变化和察觉侧面情况, 100米视野-65°范围。
|两侧摄像头:交叉路口和转向意识,90米视野-90°范围。
|雷达:远程障碍物跟踪,173米视野-20°范围。
在这次改装试验中,我们总共花了三天时间,是不是不可思议?
Day 1
第一天我们要做的是拆卸和相关准备工作。


首先要拆除福特Fusion的前后保险杠,以便于安装雷达,同时需要对计划安装的激光雷达装置进行测量,以确保我们能够地找到它的位置。
整个团队对我们新定制设计的激光雷达装置感到非常兴奋,这款激光雷达装置由来自APROE公司的优秀人才设计。我们以前尝试的自制装置(home-brew mounts)是不稳定的。我们的Velodyne HDL-64E激光雷达将会让我们拥有一个更新、更精确的荷马(Homer)。
Day 2
如果说第一天主要是准备工作,那么第二天就是安装工作了!

首先要安装雷达。荷马(Homer)的设置总共包括五个雷达单元。

第一个是远程雷达,它的优势在于让驾驶者在浓雾和雨水等恶劣天气条件下,也能看到前方200米的障碍。我们也有四个短程雷达,分别安装在汽车的各个角落,主要用于十字路口和其他复杂的交通导航。
The Bar
前视雷达中存在着一个有趣的挑战:在前保险杠下面没有固定的位置来安装雷达。我们可以把读取雷达隐藏在保险杠下面,但前提是我们必须做出选择:
直接在汽车主体部分安装读取雷达。
在汽车上建立一个特定的装置,然后在该装置上安装读取雷达单元。
将雷达放到汽车主体部分当然是一劳永逸的。但放置位置和传感器类型的选择会丧失一定的灵活性(并非所有雷达单元的大小都相同)。我们最终选择了第二个方法,即在汽车上建立一个特定的装置(称为“栅(Bar)”),该装置由APROE公司设计。在我们看到这个装置的第一眼时就爱上了它!

The Bar
下一步:安装我们宝贵的Velodyne HDL-64E激光雷达!


在改造我们以前的车型林肯MKZ时,我们组装了自制的激光雷达装置((think Home Depot DIY))。虽然它便于我们快速移动,同时也允许安装Velodyne HDL-32E(比HDL-64E更小、更轻),但它的稳定性不强。这种情况下,激光雷达传感器经常发生轻微移动,非常令人沮丧。
简言之,我们必须把这个雷达安装好,特别是当考虑到HDL-64E的沉重程度时。

是不是很漂亮?
Day 3
第三天是我们在APROE公司的最后一天,主要任务是将所有的传感器连接起来,使它们相互接触。


到这里,一辆自动驾驶汽车的改装就完成了,是不是很兴奋?
原文链接
AI100致力于打造人工智能技术和产业社区。为人工智能开发者提供信息和技术交流的平台;为人工智能创业者提供行业数据及智能应用的商业场景;为行业提供人工智能化的技术商业应用。
