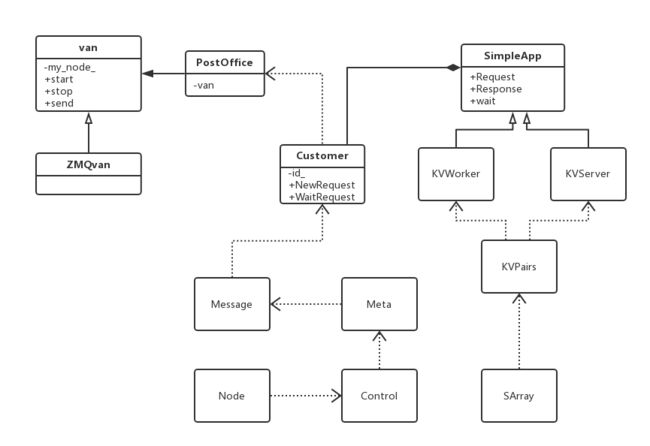
简单看一下各个类以及它们之间的关系
- Postoffice是全局管理类,单例模式创建。管理当前节点角色、其他节点的连接、心跳信息、配置信息。
- Van是负责通信的类,是Postoffice的成员。Van中std::unordered_map
- Customer用来通信,跟踪request和response。每一个连接对应一个Customer实例,连接对方的id和Customer实例的id相同。
- SimpleApp是一个基类;提供了发送接收int型的head和string型的body消息,以及注册消息处理函数。它有2个派生类。
- KVServer是SimpleApp的派生类,用来保存key-values数据。
- KVWorker是SimpleApp的派生类,用来想Server Push/Pull key-value数据。
- KVPairs封装了Key-Value结构,还包含了一个长度选项。
- SArray是Shared array,像智能指针一样共享数据,接口类似vector。
- Node封装了节点的信息,例如角色、ip、端口、是否是恢复节点。
- Control封装了控制信息,例如命令类型、目的节点、barrier_group的id、签名。
- Meta封装了元数据,发送者、接受者、时间戳、请求还是相应等。
- Message是要发送的信息,除了元数据外,还包括发送的数据。除了传递参数的数据消息外,各个节点之间控制信息有 EMPTY、TERMINATE、ADD_NODE、BARRIER、ACK、HEARTBEAT 共 6 种。EMPTY 类型不该出现,ACK 类型只有启用了 Resender 类才会出现。
Van
Van用于向各个节点发送消息。Van类负责建立链接、使用receiving thread监听收到的message,Van只定义接口,具体实现是依赖ZMQVan(源码只允许使用zmqvan)
/**
* Van用于向各个节点发送远程消息
* 如果设置变量PS_RESEND=1,van就会对超过PS_RESEND_TIMEOUT毫秒还未收到ACK的消息进行重发
*/
class Van {
public:
// 工厂方法
static Van *Create(const std::string &type);
/** 构造函数 */
Van() {}
/**析构函数 */
virtual ~Van() {}
// 启动van。调用Send方法前必须调用Start方法,该方法会初始化对其它节点的连接,启动接收线程
// 接收线程会持续接收消息。如果是系统控制消息,会把消息转交给postoffice,其它消息会转交给对应的app
virtual void Start(int customer_id);
// 发送消息,该方法是线程安全的,返回发送的字节数,如果发送失败则返回-1
int Send(const Message &msg);
// 返回当前节点
inline const Node &my_node() const {
CHECK(ready_) << "call Start() first";
return my_node_;
}
// 停止接收线程
virtual void Stop();
// 获取下一个可用的时间戳,该方法是线程安全的
inline int GetTimestamp() { return timestamp_++; }
// 是否准备好发送消息
inline bool IsReady() { return ready_; }
protected:
// 连接到指定节点
virtual void Connect(const Node &node) = 0;
// 与当前节点的端口绑定
virtual int Bind(const Node &node, int max_retry) = 0;
// 该方法会阻塞,直到接收大消息,并返回收到到的字节数,如果接收失败或超时,则返回-1
virtual int RecvMsg(Message *msg) = 0;
// 发送消息并返回字节数
virtual int SendMsg(const Message &msg) = 0;
// 将元数据转成字符串
void PackMeta(const Meta &meta, char **meta_buf, int *buf_size);
// 将字符串转成元数据
void UnpackMeta(const char *meta_buf, int buf_size, Meta *meta);
Node scheduler_;
Node my_node_;
bool is_scheduler_;
std::mutex start_mu_;
};
} // namespace ps
#endif // PS_INTERNAL_VAN_H_
Resender
Resender主要用于实现消息重发,如果在指定时间内没有收到ACK消息,则对消息进行重发
在分布式系统中,通信也是不可靠的,丢包、延时都是必须考虑的场景。PS Lite 设计了 Resender 类来提高通信的可靠性,它引入了 ACK 机制。即:
- 每一个节点,对于收到的非 ACK/TERMINATE 消息,必须响应一个 ACK 消息。
- 每一个节点,对于发送的每一个非 ACK/TERMINATE 消息,必须在本地缓存下来。存储的数据结构是一个 MAP,根据消息的内容生产唯一的键。
- 每一个节点,对于收到的 ACK 消息,必须根据反馈的键从本地缓存中移除对应的消息。
- 每一个节点运行一个监控线程,每隔 PS_RESEND_TIMEOUT 毫秒检查一下本地缓存。根据每个消息的发送时间戳和当前时间,找出超时的消息进行重发,并累加其重试次数。
Postoffice
Postoffice是全局管理类,单例模式创建。管理当前节点角色、其他节点的连接、心跳信息、配置信息。顾名思义,Postoffice类会维护了一张全局的“地址簿”,记录了所有节点的信息。
class Postoffice {
public:
// 返回单例
static Postoffice* Get() {
static Postoffice e; return &e;
}
// 获取Van实例
Van* van() { return van_; }
// 启动系统。该方法会被阻塞,直到所有的节点都启动
void Start(int customer_id, const char* argv0, const bool do_barrier);
// 停止系统。所有的节点在退出时都需要调用该方法
void Finalize(const int customer_id, const bool do_barrier = true);
// 添加消费者
void AddCustomer(Customer* customer);
// 移除消费者
void RemoveCustomer(Customer* customer);
// 获取指定的消费者
Customer* GetCustomer(int app_id, int customer_id, int timeout = 0) const;
/**
* \brief get the id of a node (group), threadsafe
*
* if it is a node group, return the list of node ids in this
* group. otherwise, return {node_id}
*/
const std::vector& GetNodeIDs(int node_id) const {
const auto it = node_ids_.find(node_id);
CHECK(it != node_ids_.cend()) << "node " << node_id << " doesn't exist";
return it->second;
}
// 获取所有节点key的范围
const std::vector& GetServerKeyRanges();
/**
* \brief the template of a callback
*/
using Callback = std::function;
/**
* \brief Register a callback to the system which is called after Finalize()
*
* The following codes are equal
* \code {cpp}
* RegisterExitCallback(cb);
* Finalize();
* \endcode
*
* \code {cpp}
* Finalize();
* cb();
* \endcode
* \param cb the callback function
*/
void RegisterExitCallback(const Callback& cb) {
exit_callback_ = cb;
}
/**
* \brief convert from a worker rank into a node id
* \param rank the worker rank
*/
static inline int WorkerRankToID(int rank) {
return rank * 2 + 9;
}
/**
* \brief convert from a server rank into a node id
* \param rank the server rank
*/
static inline int ServerRankToID(int rank) {
return rank * 2 + 8;
}
/**
* \brief convert from a node id into a server or worker rank
* \param id the node id
*/
static inline int IDtoRank(int id) {
/** 返回worker节点数量 */
int num_workers() const { return num_workers_; }
/** 返回server节点数量 */
int num_servers() const { return num_servers_; }
/** \brief Returns the rank of this node in its group
*
* Each worker will have a unique rank within [0, NumWorkers()). So are
* servers. This function is available only after \ref Start has been called.
*/
int my_rank() const { return IDtoRank(van_->my_node().id); }
/** 如果当前节点是worker节点,则返回true */
int is_worker() const { return is_worker_; }
/**如果当前节点是server节点,则返回true */
int is_server() const { return is_server_; }
/** 如果当前节点是scheduler节点,则返回true */
int is_scheduler() const { return is_scheduler_; }
/** \brief Returns the verbose level. */
int verbose() const { return verbose_; }
/** \brief Return whether this node is a recovery node */
bool is_recovery() const { return van_->my_node().is_recovery; }
/**
* \brief barrier
* \param node_id the barrier group id
*/
void Barrier(int customer_id, int node_group);
// 处理控制消息,van收到控制消息后会调用该方法
void Manage(const Message& recv);
// 更新心跳记录
void UpdateHeartbeat(int node_id, time_t t) {
std::lock_guard lk(heartbeat_mu_);
heartbeats_[node_id] = t;
}
// 获取一定时间内未报告心跳消息的节点ID
std::vector GetDeadNodes(int t = 60);
};
Customer
Customer用来通信,跟踪request和response。每一个连接对应一个Customer实例,连接对方的id和Customer实例的id相同。
/**
* \brief The object for communication.
*
* As a sender, a customer tracks the responses for each request sent.
*
* It has its own receiving thread which is able to process any message received
* from a remote node with `msg.meta.customer_id` equal to this customer's id
*/
class Customer {
public:
/**
* \brief the handle for a received message
* \param recved the received message
*/
using RecvHandle = std::function;
/**
* \brief constructor
* \param app_id the globally unique id indicating the application the postoffice
* serving for
* \param customer_id the locally unique id indicating the customer of a postoffice
* \param recv_handle the functino for processing a received message
*/
Customer(int app_id, int customer_id, const RecvHandle& recv_handle);
/**
* \brief desconstructor
*/
~Customer();
/**
* \brief return the globally unique application id
*/
inline int app_id() { return app_id_; }
/**
* \brief return the locally unique customer id
*/
inline int customer_id() { return customer_id_; }
/**
* \brief get a timestamp for a new request. threadsafe
* \param recver the receive node id of this request
* \return the timestamp of this request
*/
int NewRequest(int recver);
/**
* \brief wait until the request is finished. threadsafe
* \param timestamp the timestamp of the request
*/
void WaitRequest(int timestamp);
/**
* \brief return the number of responses received for the request. threadsafe
* \param timestamp the timestamp of the request
*/
int NumResponse(int timestamp);
/**
* \brief add a number of responses to timestamp
*/
void AddResponse(int timestamp, int num = 1);
/**
* \brief accept a received message from \ref Van. threadsafe
* \param recved the received the message
*/
inline void Accept(const Message& recved) {
recv_queue_.Push(recved);
}
};
心跳机制
为了记录网络的可达性,PS Lite 设计了心跳机制。具体而言:
- 每一个 Worker/Server 节点,每隔 PS_HEARTBEAT_INTERVAL 秒向 Scheduler 发送一条 HEARTBEAT 消息;Scheduler 节点收到后,响应一个 HEARTBEAT 消息。
- 每一个节点的 PostOffice 单例中维护了一个 MAP 结构,存储了心跳关联的节点的活跃信息。键为节点编号,值为上次收到其 HEARTBEAT 消息的时间戳。
- Worker/Server 只记录 Scheduler 的心跳,Scheduler 则记录所有节点的心跳。基于时间戳和心跳超时,可以输出所有的死亡节点。
路由
在多 Server 架构下,一个很重要的问题是如何分布多个参数。换句话说,给定一个参数的键,如何确定其存储在哪一台 Server 上。路由功能直接影响到 Worker 在 Push/Pull 阶段的通信。
PS Lite 将路由逻辑放置在 Worker 端,采用范围划分的策略,即每一个 Server 有自己固定负责的键的范围。这个范围是在 Worker 启动的时候确定的。具体代码参见方法 Postoffice::GetServerKeyRanges(),细节如下:
- 根据编译 PS Lite 时是否设定的宏 USE_KEY32 来决定参数的键的数据类型,要么是 32 位无符号整数,要么是 64 位的。
- 根据键的数据类型,确定其值域的上界。例如 uint32_t 的上界是 4294967295。
- 根据键域的上界和启动时获取的 Server 数量(即环境变量 DMLC_NUM_SERVER 的值)来划分范围。
- 给定上界 MAX 和 Server 数量 N,第 i 个 Server 负责的范围是 [MAX/Ni, MAX/N(i+1))。
需要注意的是,在不能刚好整除的情况下,键域上界的一小段被丢弃了。
调试
在系统运行中,我们经常希望能打印一些收到的消息来方便定位问题。PS Lite 通过环境变量 PS_DROP_MSG 提供了这一功能,其值代表输出消息的概率(不含百分号)。
例如,我们启动某个 Server 前,配置了环境变量 PS_DROP_MSG=70。那么该 Server 进程会按照 70% 的概率随机打印其收到的消息。
参考资料
MXNet之ps-lite及parameter server原理
PS-Lite源码分析
ps-lite源码剖析