- yaml deployment rs rc(pod控制器)
一个技术
更多内容查看我的gitbookhttps://misa.gitbook.io/k8s-ocp-yaml/deployment(pod控制器)deployment针对无状态服务,为当前最常用的pod控制器,可以实现滚动升级与回滚。ReplicaSet用来取代ReplicationController,ReplicaSet支持集合式的selector。虽然ReplicaSet可以独立使用,但一般还是建
- MISA中设备的层级结构
ww4u
3层结构层级结构设备:设备提供了物理电机通路robo:局部的关节robo:整体查看git远程分支gitremote-a
- 【蚂蚁】比用户更懂自己的自然语言客服系统
Midorra
原文标题:《蚂蚁金服MISA:比用户更懂自己的自然语言客服系统》原文作者:机器之心——邱陆陆原文链接:http://china.36kr.com/p/5133701?column=TECHNOLOGY【声明】仅供技术学习和科学研究使用,如有侵权请联系删除当手机取代了钱包,支付宝甚至比现金更常用,与蚂蚁金服的产品端一同忙碌起来的还有公司的服务端。95188服务热线就是其中之一。然而当我们谈起客服电话
- kubernetes dashboard 开启http 免密登陆
一个技术
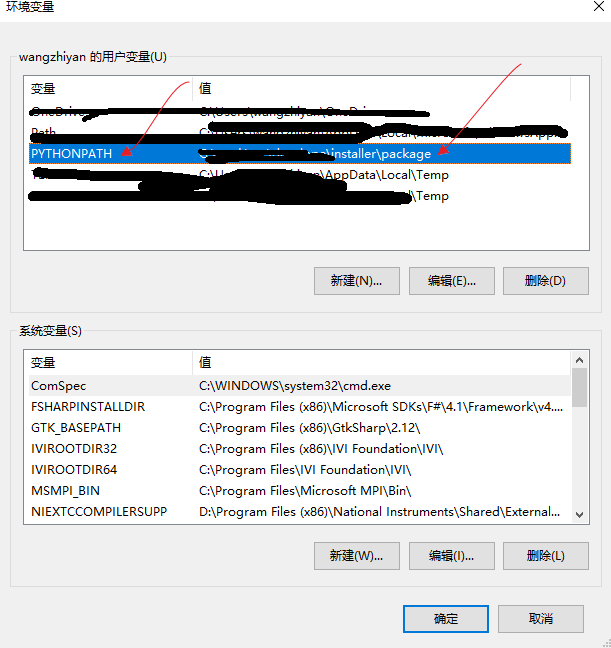
我的gitbook地址https://misa.gitbook.io/k8s-ocp-yaml/后续更新都会同步到gitbookkubernetesdashboard官方原版默认开启的https及认证,在个人环境或者私有环境中可以使用http及关闭认证,方便登陆。文本介绍修改dashboardyaml方法,在1.9以及1.10验证通过。https://raw.githubusercontent.c
- yaml文件来源
一个技术
更多内容查看我的gitbookhttps://misa.gitbook.io/k8s-ocp-yaml/yaml文件导入导出与书写规则为什么采用yaml,视觉上更直观,但是必须处理好缩进/对齐。通过yaml文件创建应用等资源,最好基于已有的文件修改,不要自己手动书写,容易出错。下面介绍yaml文件的常用查询途径及导入导出方法。yaml文件来源本文档哈,文中写出的基本都是经过验证的。kubernet
- RISC-V特权级寄存器及指令文档
CookPandar
操作系统risc-v
RISC-V特权级寄存器及指令文档M态寄存器1.ISA寄存器misa(read-write)base域:1.编码了内部支持的ISA宽度.2.当重置时,总是设置为支持的最宽ISAextensions域:功能:1.编码了现有的标准扩展。依照每个字母一位的方式,第0位代表A,第25位代表Z。保留位总返回02.重置时为最大的扩展集合2.mstatus寄存器XLEN-bitread/writeregiste
- SSR (misa + primer3 ) 设计SSR引物
奔跑的Forrest
先下载primer3和misa相关文件#下载primer3condasearchprimer3condainstall-yprimer3#misa相关的文件下载百度云里面的,其他网站的好像都不能用,自己改了一下之前的脚本可以正常运行misa相关文件放在百度云链接:https://pan.baidu.com/s/1C4eU30yyLr7iNGiuGEmPtg提取码:dypg文件包括misa.ini(
- 未来的产品
LIUSHIJIU
Misa老师在课程中介绍科技的四个特点以及对应的商业启示和他们的做法,最后提出了把科技关起来的新的想法,整个商业的逻辑是有一种东西是刚需、就是不被社会抛弃、科技是冷冰冰的、会抛弃很多的人,我们的Misa老师致力与更多的人不被抛弃,这就是老师的刚需,通过四个方面阐述自己公司打造产品和用户之间的关系,最后用一个小故事感动了很多人,小朋友的一句谢谢,瞬间‘若琪’的角色活了起来,赋予了产品心目中完美的角色
- MISA对于C,C#的支持
ww4u
c,c#的支持基于VISA需要安装visaruntime目录{megarobostudio}/package/misa/c{megarobostudio}/package/misa/c#Cvisa_adaptermidevicemrqC_MRQ编译到你的系统将misa/c中的.h,.c加入你的工程添加对于visa.h的引用路径添加对于visa32.lib的依赖路径miOpen打开设备使用vi调用a
- SSR位点的挖掘软件
EZ
除了misa可以试试其他的,krait图形界面,更简便些,且有之后关于不同ssr位点的数据统计,且可在软件里直接进行引物设计,更适合基因组这种较大数据序列的ssr位点查找misa的话,其产生的数据统计较简单,且有引物设计较麻烦。krait结果更有可读性,不需要自己投入太多精力去统计位点分布情况,软件会自动生成,且设计引物也比较方便image.pngimage.png图片引用自LianmingDu,
- 分享一款适合孩子的笔记方式,简单易有趣,让孩子学出创造力
百凌爱读书
怎么样才能把笔记做得有趣又容易被记住呢?有不少人针对这个问题进行研究,并且创造了一些独特的笔记方式,以帮助我们更好地学习。比如“葱鲔火锅式”笔记法、子弹笔记法、思维导图笔记法等等。不过,这些笔记方式大多是教给大人的,今天我要介绍一种比较适合孩子的笔记方式,那就是Misa老师的亲子折叠笔记。Misa老师是旅居海外的育儿和笔记达人,擅长用生动的视觉表达进行儿童启蒙教育。她在线上开发了一系列笔记课程,获
- Misa的2020
大青小芊
2020年是非常特殊的一年。但即使这样,也收获了很多。无论是寒假之后的线上课还是疫情之后的线下课,你都做到了相对自律和自我约束。49天没有下楼,从开始的烦燥不安到后来的习以为常,在家除了上课、看书,还学会了一些DIY美食。一场疫情,把很多人都变成了美食爱好者,做得好与不好我觉得不重要,享受的是过程,收获的是成长和经验。朱永新老师说:成长比成功更重要,成人比成才更重要。DIY苹果派网课期间,最期盼的
- 2020_ACM MM_MISA: Modality-Invariant and -Specific Representations for Multimodal Sentiment Analysis
CityD
论文深度学习
MISA:Modality-Invariantand-SpecificRepresentationsforMultimodalSentimentAnalysis论文地址:https://dl.acm.org/doi/abs/10.1145/3394171.3413678?casa_token=oI8VnZ8Eg10AAAAA:mVUbDA0AZiAXcDxiDmV9-ooRH4PxzlSMXkBC
- liveness readiness 健康检查 yaml文件解读
老菜_misa
更多内容查看我的gitbookhttps://misa.gitbook.io/k8s-ocp-yaml/livenessreadiness健康检查为了更好的检测容器是否存活及能否对外提供服务。通常在正式运行的应用中都会配置这两个参数来保障应用的正常运行。livenessprobe存活探针,来确定容器何时重启(注意是重启容器,不是杀了pod重来)。一旦探针检测失败次数达到设定值,就会重启容器。在ku
- 用户自定义功能的封装
ww4u
需求自定义应用Api用于实现特定的功能支持参数调整应用api运行在控制器端理解对应用过程进行抽象流程是固定的,但流程中进行的内容是不一样的“瓶子是固定的,但瓶子可以装水也可以装酒...”实现--Iimage.png用户开发script一个script就是一个完整的py文件script可以带有输入在script中进行流程实现用户script的重点是流程MISA的重点是设备控制image.png将这个
- 酒
玉南舟
把酒言欢却不知酒中隐藏的是七年的感情与以后在也不能相见的诀别致misa图片发自App
- 有一种刚需,叫做不想被社会抛弃
慕白_简
祝铭明.png有一种东西是刚需,就是不被社会抛弃。科技是冷冰冰的,会抛弃很多人,你让更多的人不被技术抛弃,难道不是更好的需求吗?——祝铭明Rokid创始人兼CEO背景介绍:祝铭明,连续创业的天才极客,业界称他为Misa.他创立的猛犸科技2010年被阿里巴巴全资收购,并且成为阿里M工作室的领头人。2014年他离职创立了人工智能体验公司Rokid,推出智能家庭机器人若琪,从2016年首次亮相CES便惊
- 全长转录本SSR预测
宗肃書
SSR-简单重复序列预测(MISA)MISA是使用perl编写的一支程序,能识别出序列中的微卫星和复合微卫星(两个微卫星之间由由不多于100bp的碱基对隔开),并给出其所在位点按照前人的经验,他们给出的下载地址为(http://pgrc.ipk-gatersleben.de/misa/misa.html)点击DownloadSourcecode上传至服务器运行前将misa.ini与fasta文件放
- 使用misa查找ssr位点
EZ
1.下载基因组文件,ftp://ftp.ncbi.nlm.nih.gov/genomes/all/GCA/002/864/125/GCA_002864125.1_ASM286412v1/GCA_002864125.1_ASM286412v1_genomic.fna.gz使用misa.pl查找ssr位点生成的misa文件有wc-ltsh_wgs.fna.misa127131tsh_wgs.fna.m
- 混沌大学《AI时代下人机关系出现新局面》课后练习
翱翔丶者
根据老师所讲内容,选择一款你最近使用的科技产品(或者一种历史上的科技),分析它是否符合老师介绍的逻辑,如符合,该如何改善它从而增加更多商机。Misa老师在课程中介绍科技的四个特点以及对应的商业机会:(1)科技的过剩:科技本身的能力是过剩的,在理性市场中任何功能过剩的产品,对于买单的消费者都是一种浪费,最终一定会被更好的、更理性的、更优秀的竞争者所取代。好的产品设计就是在做减法。(2)科技的不完善:
- 思维导图和视觉笔记践行100天☞day40
up方方
一、最近好像是长胖了呢……图片发自App图片发自App二、人物组成是由头、身、手、腿四部分构成,画的时候注意肘关节和膝盖的转折,以及人物的比例。今天跟misa老师学火柴人哦!图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App
- 混沌大学-祝铭明 Misa Zhu:AI时代下人机关系出现新局面-课后练习
SimonDeng
根据老师所讲内容,选择一款你最近使用的科技产品(或者一种历史上的科技),分析它是否符合老师介绍的逻辑,如符合,该如何改善它从而增加更多商机。Misa老师在课程中介绍科技的四个特点以及对应的商业机会:(1)科技的过剩:科技本身的能力是过剩的,在理性市场中任何功能过剩的产品,对于买单的消费者都是一种浪费,最终一定会被更好的、更理性的、更优秀的竞争者所取代。好的产品设计就是在做减法。(2)科技的不完善:
- 2020 ChinaJoy | 我就说三点,大家记一下
京东商城
è°èè§èèéèééèè°¤§é§é¨è¨ééèbuff¤¤éèèèééè褧谰01¤2020ChinaJoy¨¤CJèèèè°é±è·JDEsportsèé·¤§¤§è°éè§ééé¤èé±è¨é°°°è°02·¨èè¤è°CJéé±°E4-06B褰èèèéé¨3é5SRPG3èPro騱°éèè°JOY¨°¤èé03èèè°èè¤é±é°§éMisa褧°¨·§°éèéèCJ±
- 8张图理解Java
zzjjiandan
java
8张图理解Java本文由ImportNew-era_misa翻译自programcreek。欢迎加入Java小组。转载请参见文章末尾的要求。一图胜千言,下面图解均来自ProgramCreek网站的Java教程,目前它们拥有最多的票选。如果图解没有阐明问题,那么你可以借助它的标题来一窥究竟。1、字符串不变性下面这张图展示了这段代码做了什么12Strings="abcd";s=s.concat("ef
- Rokid 创始人 Misa
haima1998
startup
转自:http://www.leiphone.com/news/201603/QwLfWJ4ZjpY7rrQz.html那个在CES2016获奖的Rokid,其创始人也是个“浮游在边缘的人“2016-03-0410:01察日苏5条评论按:作者察日苏,舜宇光学科技集团战略发展中心战略分析师。杭州的第一场雪,我约了两位朋友终于去了Rokid位于杭州的全球研发中心,见了Misa-Yoda。我们是在Mis
- From 简书 转帖一下如何安装k8s1.10 改天做下实验. https://www.jianshu.com/p/9c7e1c957752...
weixin_30907523
centos7.3kubernetes/k8s1.10离线安装老菜_misa关注2018.04.2523:57字数1243阅读266评论1喜欢3本文介绍在centos7.3使用kubeadm快速离线安装kubernetes1.10。采用单master,单node(可以多node),占用资源较少,方便在笔记本或学习环境快速部署,不适用于生产环境。转载注明出处。所需文件百度盘连接链接:https://
- 教你三招,秒变职场演讲“老司机”
出口陈璋
职场演讲如何入门?有没有轻松快速上手的小妙招?下面三招,将帮助大家从“演讲小白”秒变职场演讲“老司机”。图/Misa第一招,说话声音大两倍。也就是说,在上台演讲的时候,不能再用你原先正常说话的声音大小了,要把你的音量提高到你平时正常说话的两倍。为什么呢?你想想看,平时私底下说话,大部分场合,都是一对一,面对面的说话,所以只要自然放松的声音就好。但是到了台上来以后,不管是工作汇报,还是开会发言,很有
- misa和primer3结合快速设计SSR引物
灵动的小猪
文件下载下载misa,同时将misa.ini放在misa的同一个文件夹下,然后下载三个perl脚本get_set_trimmer.pl、p3_in.pl和p3_out.pl,建议下载到同一个文件夹下。介绍misa.ini:配置文件p3_in.pl:输入misa.pl的输出结果(file.fasta.misa),将引物设计的参数文件(模板,产物长度,目标区域等)导入到一个以“p3in”为后缀的文件中
- 64号#个人成长集训营#D19风险管理日作业 简单版
莹莹微光
今天是我们个人成长集训营的第十九天——风险管理日今天的作业有两个版本,大家可以自行选择。鼓励大家多多挑战自我哟!作业内容如下简单版充分准备一份学习资源,让自己能在等车/坐车的情况下学习。学习资源包括:书本,音频,视频等一、随身带一本纸质书,坐地铁,等飞机,等人时适用。二、手机学习资源:①薄荷阅读音频+讲义②电子书@百度云盘+微信读书。③趁早视频课:跟Misa学视觉笔记将爱情进行到底从零开始玩转手机
- 2017年12月 pd实践月
西朵er
本月参加了一次接力,用日常习惯的呼吸方式很快嗓子腾到不行,立马改用泡不的鼻子吸气嘴呼气,因为停跑两个多月,第二条大腿小腿特别棒酸疼。真的是跑不能停。本月参加了莫雨竹老师的sed训练营,见识了最顶级的运营是啥样,这次课程是我付费课程里面最超值的一门。本月还和misa老师建立了链接,帮助老师一起招生,还宣传了一把趁早,把自己一直不敢下手的思维导图捡了起来。2018年1月:1.好几个课程需要复盘总结,很
- Java常用排序算法/程序员必须掌握的8大排序算法
cugfy
java
分类:
1)插入排序(直接插入排序、希尔排序)
2)交换排序(冒泡排序、快速排序)
3)选择排序(直接选择排序、堆排序)
4)归并排序
5)分配排序(基数排序)
所需辅助空间最多:归并排序
所需辅助空间最少:堆排序
平均速度最快:快速排序
不稳定:快速排序,希尔排序,堆排序。
先来看看8种排序之间的关系:
1.直接插入排序
(1
- 【Spark102】Spark存储模块BlockManager剖析
bit1129
manager
Spark围绕着BlockManager构建了存储模块,包括RDD,Shuffle,Broadcast的存储都使用了BlockManager。而BlockManager在实现上是一个针对每个应用的Master/Executor结构,即Driver上BlockManager充当了Master角色,而各个Slave上(具体到应用范围,就是Executor)的BlockManager充当了Slave角色
- linux 查看端口被占用情况详解
daizj
linux端口占用netstatlsof
经常在启动一个程序会碰到端口被占用,这里讲一下怎么查看端口是否被占用,及哪个程序占用,怎么Kill掉已占用端口的程序
1、lsof -i:port
port为端口号
[root@slave /data/spark-1.4.0-bin-cdh4]# lsof -i:8080
COMMAND PID USER FD TY
- Hosts文件使用
周凡杨
hostslocahost
一切都要从localhost说起,经常在tomcat容器起动后,访问页面时输入http://localhost:8088/index.jsp,大家都知道localhost代表本机地址,如果本机IP是10.10.134.21,那就相当于http://10.10.134.21:8088/index.jsp,有时候也会看到http: 127.0.0.1:
- java excel工具
g21121
Java excel
直接上代码,一看就懂,利用的是jxl:
import java.io.File;
import java.io.IOException;
import jxl.Cell;
import jxl.Sheet;
import jxl.Workbook;
import jxl.read.biff.BiffException;
import jxl.write.Label;
import
- web报表工具finereport常用函数的用法总结(数组函数)
老A不折腾
finereportweb报表函数总结
ADD2ARRAY
ADDARRAY(array,insertArray, start):在数组第start个位置插入insertArray中的所有元素,再返回该数组。
示例:
ADDARRAY([3,4, 1, 5, 7], [23, 43, 22], 3)返回[3, 4, 23, 43, 22, 1, 5, 7].
ADDARRAY([3,4, 1, 5, 7], "测试&q
- 游戏服务器网络带宽负载计算
墙头上一根草
服务器
家庭所安装的4M,8M宽带。其中M是指,Mbits/S
其中要提前说明的是:
8bits = 1Byte
即8位等于1字节。我们硬盘大小50G。意思是50*1024M字节,约为 50000多字节。但是网宽是以“位”为单位的,所以,8Mbits就是1M字节。是容积体积的单位。
8Mbits/s后面的S是秒。8Mbits/s意思是 每秒8M位,即每秒1M字节。
我是在计算我们网络流量时想到的
- 我的spring学习笔记2-IoC(反向控制 依赖注入)
aijuans
Spring 3 系列
IoC(反向控制 依赖注入)这是Spring提出来了,这也是Spring一大特色。这里我不用多说,我们看Spring教程就可以了解。当然我们不用Spring也可以用IoC,下面我将介绍不用Spring的IoC。
IoC不是框架,她是java的技术,如今大多数轻量级的容器都会用到IoC技术。这里我就用一个例子来说明:
如:程序中有 Mysql.calss 、Oracle.class 、SqlSe
- 高性能mysql 之 选择存储引擎(一)
annan211
mysqlInnoDBMySQL引擎存储引擎
1 没有特殊情况,应尽可能使用InnoDB存储引擎。 原因:InnoDB 和 MYIsAM 是mysql 最常用、使用最普遍的存储引擎。其中InnoDB是最重要、最广泛的存储引擎。她 被设计用来处理大量的短期事务。短期事务大部分情况下是正常提交的,很少有回滚的情况。InnoDB的性能和自动崩溃 恢复特性使得她在非事务型存储的需求中也非常流行,除非有非常
- UDP网络编程
百合不是茶
UDP编程局域网组播
UDP是基于无连接的,不可靠的传输 与TCP/IP相反
UDP实现私聊,发送方式客户端,接受方式服务器
package netUDP_sc;
import java.net.DatagramPacket;
import java.net.DatagramSocket;
import java.net.Ine
- JQuery对象的val()方法执行结果分析
bijian1013
JavaScriptjsjquery
JavaScript中,如果id对应的标签不存在(同理JAVA中,如果对象不存在),则调用它的方法会报错或抛异常。在实际开发中,发现JQuery在id对应的标签不存在时,调其val()方法不会报错,结果是undefined。
- http请求测试实例(采用json-lib解析)
bijian1013
jsonhttp
由于fastjson只支持JDK1.5版本,因些对于JDK1.4的项目,可以采用json-lib来解析JSON数据。如下是http请求的另外一种写法,仅供参考。
package com;
import java.util.HashMap;
import java.util.Map;
import
- 【RPC框架Hessian四】Hessian与Spring集成
bit1129
hessian
在【RPC框架Hessian二】Hessian 对象序列化和反序列化一文中介绍了基于Hessian的RPC服务的实现步骤,在那里使用Hessian提供的API完成基于Hessian的RPC服务开发和客户端调用,本文使用Spring对Hessian的集成来实现Hessian的RPC调用。
定义模型、接口和服务器端代码
|---Model
&nb
- 【Mahout三】基于Mahout CBayes算法的20newsgroup流程分析
bit1129
Mahout
1.Mahout环境搭建
1.下载Mahout
http://mirror.bit.edu.cn/apache/mahout/0.10.0/mahout-distribution-0.10.0.tar.gz
2.解压Mahout
3. 配置环境变量
vim /etc/profile
export HADOOP_HOME=/home
- nginx负载tomcat遇非80时的转发问题
ronin47
nginx负载后端容器是tomcat(其它容器如WAS,JBOSS暂没发现这个问题)非80端口,遇到跳转异常问题。解决的思路是:$host:port
详细如下:
该问题是最先发现的,由于之前对nginx不是特别的熟悉所以该问题是个入门级别的:
? 1 2 3 4 5
- java-17-在一个字符串中找到第一个只出现一次的字符
bylijinnan
java
public class FirstShowOnlyOnceElement {
/**Q17.在一个字符串中找到第一个只出现一次的字符。如输入abaccdeff,则输出b
* 1.int[] count:count[i]表示i对应字符出现的次数
* 2.将26个英文字母映射:a-z <--> 0-25
* 3.假设全部字母都是小写
*/
pu
- mongoDB 复制集
开窍的石头
mongodb
mongo的复制集就像mysql的主从数据库,当你往其中的主复制集(primary)写数据的时候,副复制集(secondary)会自动同步主复制集(Primary)的数据,当主复制集挂掉以后其中的一个副复制集会自动成为主复制集。提供服务器的可用性。和防止当机问题
mo
- [宇宙与天文]宇宙时代的经济学
comsci
经济
宇宙尺度的交通工具一般都体型巨大,造价高昂。。。。。
在宇宙中进行航行,近程采用反作用力类型的发动机,需要消耗少量矿石燃料,中远程航行要采用量子或者聚变反应堆发动机,进行超空间跳跃,要消耗大量高纯度水晶体能源
以目前地球上国家的经济发展水平来讲,
- Git忽略文件
Cwind
git
有很多文件不必使用git管理。例如Eclipse或其他IDE生成的项目文件,编译生成的各种目标或临时文件等。使用git status时,会在Untracked files里面看到这些文件列表,在一次需要添加的文件比较多时(使用git add . / git add -u),会把这些所有的未跟踪文件添加进索引。
==== ==== ==== 一些牢骚
- MySQL连接数据库的必须配置
dashuaifu
mysql连接数据库配置
MySQL连接数据库的必须配置
1.driverClass:com.mysql.jdbc.Driver
2.jdbcUrl:jdbc:mysql://localhost:3306/dbname
3.user:username
4.password:password
其中1是驱动名;2是url,这里的‘dbna
- 一生要养成的60个习惯
dcj3sjt126com
习惯
一生要养成的60个习惯
第1篇 让你更受大家欢迎的习惯
1 守时,不准时赴约,让别人等,会失去很多机会。
如何做到:
①该起床时就起床,
②养成任何事情都提前15分钟的习惯。
③带本可以随时阅读的书,如果早了就拿出来读读。
④有条理,生活没条理最容易耽误时间。
⑤提前计划:将重要和不重要的事情岔开。
⑥今天就准备好明天要穿的衣服。
⑦按时睡觉,这会让按时起床更容易。
2 注重
- [介绍]Yii 是什么
dcj3sjt126com
PHPyii2
Yii 是一个高性能,基于组件的 PHP 框架,用于快速开发现代 Web 应用程序。名字 Yii (读作 易)在中文里有“极致简单与不断演变”两重含义,也可看作 Yes It Is! 的缩写。
Yii 最适合做什么?
Yii 是一个通用的 Web 编程框架,即可以用于开发各种用 PHP 构建的 Web 应用。因为基于组件的框架结构和设计精巧的缓存支持,它特别适合开发大型应
- Linux SSH常用总结
eksliang
linux sshSSHD
转载请出自出处:http://eksliang.iteye.com/blog/2186931 一、连接到远程主机
格式:
ssh name@remoteserver
例如:
ssh
[email protected]
二、连接到远程主机指定的端口
格式:
ssh name@remoteserver -p 22
例如:
ssh i
- 快速上传头像到服务端工具类FaceUtil
gundumw100
android
快速迭代用
import java.io.DataOutputStream;
import java.io.File;
import java.io.FileInputStream;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOExceptio
- jQuery入门之怎么使用
ini
JavaScripthtmljqueryWebcss
jQuery的强大我何问起(个人主页:hovertree.com)就不用多说了,那么怎么使用jQuery呢?
首先,下载jquery。下载地址:http://hovertree.com/hvtart/bjae/b8627323101a4994.htm,一个是压缩版本,一个是未压缩版本,如果在开发测试阶段,可以使用未压缩版本,实际应用一般使用压缩版本(min)。然后就在页面上引用。
- 带filter的hbase查询优化
kane_xie
查询优化hbaseRandomRowFilter
问题描述
hbase scan数据缓慢,server端出现LeaseException。hbase写入缓慢。
问题原因
直接原因是: hbase client端每次和regionserver交互的时候,都会在服务器端生成一个Lease,Lease的有效期由参数hbase.regionserver.lease.period确定。如果hbase scan需
- java设计模式-单例模式
men4661273
java单例枚举反射IOC
单例模式1,饿汉模式
//饿汉式单例类.在类初始化时,已经自行实例化
public class Singleton1 {
//私有的默认构造函数
private Singleton1() {}
//已经自行实例化
private static final Singleton1 singl
- mongodb 查询某一天所有信息的3种方法,根据日期查询
qiaolevip
每天进步一点点学习永无止境mongodb纵观千象
// mongodb的查询真让人难以琢磨,就查询单天信息,都需要花费一番功夫才行。
// 第一种方式:
coll.aggregate([
{$project:{sendDate: {$substr: ['$sendTime', 0, 10]}, sendTime: 1, content:1}},
{$match:{sendDate: '2015-
- 二维数组转换成JSON
tangqi609567707
java二维数组json
原文出处:http://blog.csdn.net/springsen/article/details/7833596
public class Demo {
public static void main(String[] args) { String[][] blogL
- erlang supervisor
wudixiaotie
erlang
定义supervisor时,如果是监控celuesimple_one_for_one则删除children的时候就用supervisor:terminate_child (SupModuleName, ChildPid),如果shutdown策略选择的是brutal_kill,那么supervisor会调用exit(ChildPid, kill),这样的话如果Child的behavior是gen_
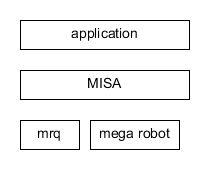 MISA
MISA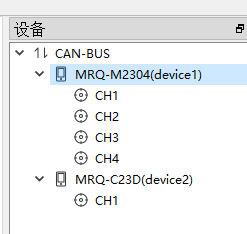 设备管理器
设备管理器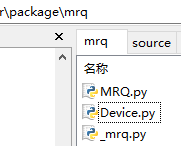 包里的源文件
包里的源文件
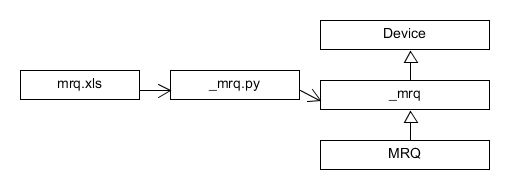
 PYTHONPATH
PYTHONPATH