从2004年到2007年,DARPA组织的三届无人驾驶挑战赛,从第一届无一个团队完成比赛,到第二届几乎所有决赛团队都超越了第一届的最好成绩,再到第三届在更加苛刻的规则下依然有团队完成比赛,短短的3年的时间,成功奠定了当代无人驾驶的技术路线,培养了大批无人驾驶相关的人才。2007年城市挑战赛结束后,DARPA局长表示:以后不会再有比赛了,DARPA的使命已经完成,接下来就要看资本的力量了。
是的,Google的人已经带着钱来了。
Google无人驾驶发展之路
1)拉里·佩奇的无人驾驶梦
如果要问为什么是Google最早做出来无人驾驶?答案是:因为拉里·佩奇(Larry Page)在。或者说,只要佩奇在,就算不是无人驾驶,也会是其他什么改变世界的发明。
佩奇的父母都是密歇根大学的计算机教授,他的本科也在密歇根大学度过。密歇根大学为美国培养了大量的汽车人才,也给佩奇研究无人车种下了种子。
1995年,年仅22岁的佩奇考上了斯坦福大学的博士,他当时列出了一张他想要研究的清单:如何利用超链接改变互联网搜索,以及自动驾驶汽车。导师建议他选择搜索方向,Google,就是一家博士论文答辩诞生的公司。
但佩奇从来不想把梦想局限在互联网里,他对新事物充满兴趣。DARPA挑战赛这样的新鲜事,当然也引起了佩奇的注意。在这几次的比赛中,Google两位创始人拉里·佩奇(Larry Page)和谢尔盖·布林(Sergey Brin)都在全程观战,他们会戴着帽子和大墨镜以防别人认出他们。尤其是佩奇,对无人驾驶是真感兴趣,他还会去斯坦福找人讨论比赛方案。就连很多参赛的人都对真正实现无人驾驶抱有怀疑,但佩奇却异常坚定。

谷歌创始人拉里·佩奇(Larry Page)
2)Google 街景项目
Sebastian Thrun领导的斯坦福大学团队与Stanley一起赢得了第二届DARPA挑战赛,Stanley是一辆改装的2004款大众途锐(Toureg)。在准备这次比赛的过程中,他们在车顶上安装了多个摄像头,以便每当出现问题时都能重现发生了什么。意识到仅仅是浏览照片就很有趣,所以Thrun指派了一名本科生Joakim Arfvidsson来创建一个程序,将所有的剪辑粘合在一起,形成无缝的视图。基于这个创意,Thrun和他的博士生Hendrik Dahlkamp(为Stanley开发了计算机视觉)与2006年10月创立了一个名叫VuTool的公司——通过使用移动车辆上安装的多部摄像机拍摄城市街道的图片,然后将图片拼接成360度全景图像,并利用GPS将全景图像和街道位置信息对应起来,这样坐在电脑前就可以看到街道上的高清景象。这种实景地图技术,可以获得从人的视角的地图浏览体验。
在2005年的比赛上,Anthony Levandowski的作品Ghostrider成功引起了斯坦福大学的教授Sebastian Thrun的注意。2006年,Thurn 邀请 Levandowski 加入VuTool,Levandowski雇佣了一支车队,花两周时间拍摄整个旧金山,并创建了一个演示,希望将初创公司卖给风投资本。
Thrun团队所作的事情听起来有点像“街景”哈?没错,当时Google也在做一个类似的项目,名字就叫Street View,即街景。所以,2007年年初,Google收购了VuTool以避免陷入与风险投资的竞争,Thrun和VuTool团队成员正式进入Google,据说当时团队里每个成员都拿到了100万美元的奖金!2007年5月30日,Google正式推出街景服务,人们犹记得第一次使用Google街景时的兴奋,“放佛全世界都摆在了我的面前”。下图为Google街景图。

Google街景
2007年11月,Thrun团队有开启了一个叫Ground Truth的项目,目的是整合政府机构,以及自己通过街景和卫星图像(利用计算机视觉算法)收集的数据,有时还需要进行一些手工操作来纠正错误并添加原本无法获得的信息,以便获得更精确的地图数据。
Google街景和Ground Truth项目为Google开发无人驾驶积累了一定的基础,因为Google街景采景车的硬件在一定程度上和无人车的硬件是一样的;另一方面精确的地图能满足无人驾驶定位、路径规划、环境感知和控制等需要,并在每个环节发挥着直观重要的作用。下图为街景采景车,配备有15个摄像头和Velodyne激光雷达。

Google街景采景车
3)“Project Chauffeur”项目启动
早在2005年Thrun带领Stanford团队夺得了挑战赛的冠军后,佩奇就找过 Thrun,希望Thrun帮他造一辆能在加州街道上行驶的无人车。Thrun 拒绝了他,原因是当时 Thrun 自己也不相信无人车能跑在大街上。
2007 年,Thrun 的Junior在第三届 DARPA 城市挑战赛中获得第二名,惜败于 CMU 车队,但是 Thrun 还是被谷歌的两位创始人盯上。加上,Thrun团队在Google街景项目上出色的表现,震撼了佩奇。不久,拉里·佩奇和谢尔盖·布林邀请 Thrun 帮忙建立一个神秘实验室,这个实验室主要用来研究Moonshot项目(即疯狂的想法或不大可能实现的大胆创新项目),这个实验室就是Google X,特伦成为了Google X的第一任掌门人。谷歌的自动驾驶项目,就发端于这个神秘的 GoogleX 实验室。
Google X实验室办公区域
在Thrun加盟谷歌之前,佩奇还对他承诺:“在这里,你可以做你感兴趣的任何事情,钱不是问题。”对一个科学家来说,有这么好的老板,夫复何求?Thrun接受了佩奇的邀请,出任Google副总裁。刚开始Thrun并没有瞄准他赖以成名的自动驾驶技术。但在2009年初的一天,佩奇找到Thrun问:“你能不能帮我们打造一款可以在加州的任何道路上都自由地行驶的自动驾驶汽车?”
佩奇这个大胆的畅想,让Thrun被吓了一跳。
尽管Thrun团队在之前的两次DARPA挑战赛上都取得了出类拔萃的成绩,但2005年那次是在沙漠中进行的,在路障很少的情况下也只跑了132英里;而2007年那次,虽然是在城市举行,但也只跑了60英里,并且,车上还有安全驾驶员。在此之后,Thrun团队的自动驾驶汽车最好的成绩是“在一座空城里跑了280英里”。确切地说,当时的自动驾驶技术,拿来做Demo也显得有点寒碜。Thrun深知将一个Demo项目升级为“可在加州的任何道路上自由行使”的商业化项目有多难,因此,他不敢接招。于是,他对佩奇说:“这个,没法实现。"
Thrun在多年后接受Business Insider采访时回忆说:对我这样一个“世界级专家”来说,那是我职业生涯中最尴尬的一刻。Thrun想当然地认为,这事儿不会有“下文”了。但佩奇是一个不达目的誓不甘休的人,次日,他又来找到Thrun:“你是专家,我相信你说的‘不能实现’是有理由的。那么,你得从技术的角度给我一个理由,说说为什么这个想法无法实现。这样,我也好给谢尔盖.布林一个交代啊。”
然而,Thrun在想了好久之后,依然没找到一个拒绝佩奇的理由。接着佩奇套用了史蒂夫·乔布斯的方法,佩奇鼓励Thrun说:“再说,你不能仅仅把自己定位一个现有技术方面的’专家‘,你应该把自己定位为一个能创造未来的人。也许诚如你所说,这个想法无法实现,但如果有10%成功的可能性呢?梦想还是要有的,万一实现了呢?” 佩奇告诉特伦:只要在加利福利亚开上1000英里,就算完成任务。经过这番洗脑后,Thrun决定挑战一下自己的能力极限。
在Thrun的带领下,Google的无人驾驶开始起步,这个神秘的项目还有一个内部代号“Project Chauffeur”。
2009年1月17日,Google的自动驾驶项目Project Chauffeur正式启动。Thrun邀请了一些参加过DARPA挑战赛的重量级人物:Chris Urmson(2007年城市挑战赛CMU技术总监)负责软件、Mike Montemerlo(DARPA挑战赛斯坦福软件负责人)负责电子地图、Anthony Levandowski负责硬件、Hendrik Dahlkamp负责雷达感知。他还挑选了其他的人:律师、界面设计师等等。每周,都会有几十位Google工程师参与自动驾驶汽车的测试,填写用户调查。
Project Chauffeur项目的第一代测试车是由丰田Prius改造而来的。工程师们在丰田 Prius 车型上的前保险杠外壳和前翼子板上挖孔,安装了用于准确测距和测速的毫米波雷达;车顶上安装的是Velodyne 64线激光雷达;在左后轮上安装了外接的轮速传感器,以获取更高精度的轮速信息;在挡风玻璃下安装摄像头,用以识别红绿灯。下图为Google高层和第一辆自动驾驶测试车合影。
从左至右:Eric Schmidt,Larry Page 和Sergey BrinGoogle与自动驾驶测试车(Prius 改装)合影
测试除了要验证无人驾驶车辆系统、传感器性能,还有一个核心重点是定位,无人驾驶车辆的定位精度需要达到厘米甚至毫米级,这样可以更好地了解周围路况,做到防患于未然,Thrun 团队通过将激光雷达、3D 相机、GNSS-RTK和惯性导航系统等技术数据融合,来描述周边自行车、行人、车辆的情况。Thrun 团队还开发了新技术来追踪所有的物体、行人、汽车、自行车来往穿梭的运动态势,以便更好理解交通信号灯和周围交通环境的变化。上述成果一起实现了将车辆周围环境数字化。
4)测试泄密,遭遇合法性挑战
刚开始,路测进行得很神秘,外人很难知悉。这些外观奇怪的车辆是怎样在众目睽睽之下被藏起来的呢?一些原因是,这些车通常是夜间外出测试的,看到它们的人通常会错把这些车当成Google街景的采景车。
Google的自动驾驶汽车项目第一次为外人所知悉,是在2009年12月4日。那天,一个与自动驾驶版的丰田普锐斯擦肩而过的路人注意到了这辆车的“异样”之处——车顶上的激光雷达实在太引人注目了。恰好,这位路人是个计算机专家,他对自驾驶有所了解。于是当天一段题为“First video of Google's self-driving car “的视频出现在了视频网站上。不过,由于这个账户的粉丝数实在太少,这则视频在当时并没有引起多少关注。到2009年底,Google的第一代自动驾驶汽车Prius 完成了100英里的无人接管自动驾驶任务。
Google做自动驾驶这件事第一次广为人知,始于《纽约时报》在2010年10月的一次公开报道。虽然Google对自动驾驶项目采取了严格的保密措施,但百密一疏——Google雇佣的安全测试员是个“临时工”(长期以来,Google为了降低成本,都对一些不那么重要的岗位做劳务外包),尽管可能也签订了保密协议,但毕竟,临时工的责任心、忠诚度很难达到“正式职工”的水平。恰好,这位临时工的一位高中同学在纽约时报上班,有一次两人一起喝酒吹牛逼,这哥们儿一不小心就把Google自动驾驶项目的秘密给泄露了出去。
根据《纽约时报》那篇报道,当时,谷歌已有7辆测试车辆跑了14万英里,但总共只发生过一次追尾事件。其中有一辆车曾在没有任何人工干预的情况下跑了1000英里。当时,美国各州关于机动车辆的现有法律,是基于人类驾驶的车辆的,以这些法律的标准来衡量,自动驾驶汽车就是一个非法的存在,在封闭场地上做测试是可以的,但要想光明正大地开上公开道路,则连门都没有。
在被《纽约时报》爆料出来之后,原本偷偷摸摸进行的路测就无法持续了。如果想要继续进行测试,必须游说政府部门立法,获得测试牌照。Google在政府游说专家David Goldwater的协助下,2011年9月,内华达州的自动驾驶法案通过审批,成为美国第一个允许自动驾驶上路测试的州。
不过,当谷歌在游说地方立法机关的时候,由通用、宝马和丰田等12家汽车制造商组成的美国汽车制造商联盟发出了强烈的反对声。该联盟的发言人Dan Gage表示:允许公司和个人用自动驾驶技术改装现有的汽车,这样做可能会引发故障,而且汽车制造商们在由此引发的诉讼案中无法获得法律保护。那些汽车不是由Google制造的,Google会用非预期的方式对汽车进行改装。
针对这些困难,Google的对策是:走上层路线,先搞定NHTSA(美国高速公路安全管理局简称,是美国汽车安全的最高主管机关),然后跟NHTSA的官员联合起来,向各州的立法机构施加影响。Google甚至挖走了NHTSA的一位副局长来担任其自动驾驶部门的首席安全官,此后至少又有五名交通运输部官员离职加入Google,代表Google游说自己在各地立法机构里的“人脉”。经过一系列运作之后,到了2012年5月7日,Google获得了内华达州颁发的第一张自动驾驶汽车测试牌照。这一年,在一些议员们试乘过谷歌的自动驾驶汽车后,佛罗里达州、夏威夷州和加州的立法机关也通过了允许自动驾驶汽车上路的法律。其中,时任加州州长Jerry Brown是坐着Google的无人车来到Google山景城总部,在Google的办公大楼里签署了那条允许Google的无人车在加州上路的法案。
2012 年,Google的无人驾驶车型改为Lexus Rx450h SUV,该车型为四驱版,续航里程较Prius长,但传感器配置与第一代车型相同,下图为第二代测试车型。这一年,自动驾驶 Lexus RX450h 车队在高速公路上,累计完成了超过300,000英里(约480,000公里)的测试里程。

Google第二代无人驾驶测试车型(Lexus RX450h)
5)Urmson接棒Thrun,Google推出完全自动驾驶汽车
随着自动驾驶技术的发展,为了更好的对自动驾驶产业进行监督和管理,2013年,NHTSA率先发布了自动驾驶汽车的分级标准,其对车辆自动化的描述共有4个级别,如下图所示。
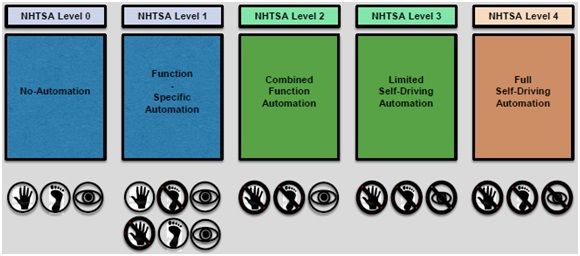
NHTSA自动驾驶分级标准
2014年,SAE(国际自动机工程师学会,原译美国汽车工程师学会)也制定了一套自动驾驶汽车分级标准SAE J3016《标准道路机动车驾驶系统分类与定义》,其中对自动化描述为5个等级。最新的标准如下图所示,标准把L0、L1、L2划为驾驶辅助功能,也就是ADAS;把L3、L4、L5划为自动驾驶功能,也就是AD。
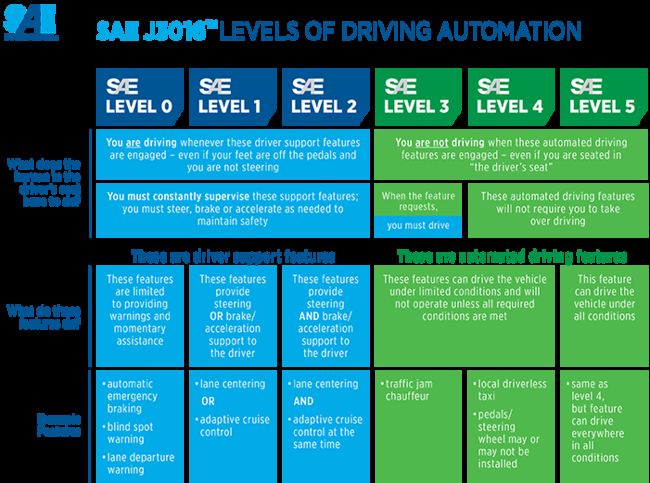
SAE自动驾驶分级标准
NHTSA的标准与SAE在某种程度上比较相似,但用语更加简单,没有进行过多的详细说明。相比之下,SAE的说明更加具体,同时也参考了不同公司在自动驾驶研发上的发展趋势。因此,美国交通部在2016年9月20号发布了针对自动驾驶汽车的首项联邦指导方针。该方针旨在引导自动驾驶技术进步、促进自动驾驶技术合理布局的政策抛弃了NHTSA之前提出的分级标准,宣布将采用在世界范围应用更加广泛的SAE分级标注。当然SAE标准也有不足之处,在2014年发布之后,SAE J3016分别于2016年9月、2018年6月进行了两次更新。
加州通过的自动驾驶汽车法案中有一条“车上必须配备驾驶员,以便在紧急情况下接管车辆”。在这条精神的指导下,Google在2013年推出了一款半自动驾驶系统AutoPilot(L2)。但当这款L2级自动驾驶系统上车测试时,Google发现了一个严重的问题。Google将这款车提供给少数几个长途通勤的员工使用,并反复提醒他们:1.必须时刻注意并始终注视着道路;2.双手可以偶尔脱离方向盘,但必须保持警惕;3.公司会通过车内的摄像头对其进行监视,如果不遵守这些规定,系统会被关闭。尽管已有公司的再三提醒,但这些员工在上了这款半自动驾驶汽车之后,发短信、化妆、使用笔记本电脑等各种乱七八糟的动作应有尽有。更离谱的是,在车辆时速55英里的高速上,竟然有一位“驾驶员”睡着了!看到这些用户的表现后,Google自动驾驶部门的工程师们慌了。这个项目只持续了几个星期便被关停。此后,Google打算只做“完全不需要人类参与”的全自动驾驶汽车。
2013 年,Thrun 从Google离职,离开了他一手打造的无人车帝国。离职具体原因不详,有一种说法是他醉心教育,希望将更多精力投入到另一个创业项目 Udacity(在线技术学习平台)上,为业界培养更多的无人驾驶相关的人才。
Thrun 走后,带领技术团队的重担落在了 Chris Urmson 身上。不过在 Levandowski 看来,这个位置应该自己来最合适,因此他与 Urmson 关系变得相当紧张。后来佩奇也证实了这一点,Urmson 与 Levandowski 一直在明争暗斗,这甚至成为Google管理层的心病之一。
Urmson 上任后,确立了不要方向盘、不要刹车,开发完全自动驾驶的技术路线。2014年5月27日,Google推出了一款全新设计的,不带方向盘、刹车和油门踏板的纯电动全自动驾驶汽车,即“Firefly”,这款车借鉴PodCar原型,由Google X 自动驾驶项目团队负责外观、结构和动力系统设计,由密歇根汽车制造商Roush Enterprises负责组装。该车还整合了Google地图和云服务等优势资源,增强人机交互体验,更加关注行人安全。

Google Firefly 无人驾驶车
为了确保安全,Firefly 原型车的最高速度被限制在 25英里/小时(1英里约1.6公里)。这对于城市出行通勤来说,并不是一个很理想的速度。Firefly上路后,由于开得太慢了,经常影响后车的正常行驶(在美国,限速25英里/小时的道路上,很多车会开到35英里/小时),因此,多次被投诉。2014年8月22日,加州更是出台了一项新的法规,禁止不带方向盘的无人车上路,新规将于9月16日生效。随后,谷歌紧急启动了一个妥协版的方案:对车辆进行改造,加装临时方向盘、刹车和油门踏板,待将来法律许可时再重新撤掉这些人工操控器件。这个改造后的新版本于当年12月份推出。
2015 年 10 月 20 日,一位叫 Steve Mahan 的盲人乘客,坐在没有人为干预控制以及安全司机的Firefly中通过奥斯汀市区,如下图所示。这一真正意义上的无人驾驶也被认为是自动驾驶技术的一次里程碑事件。

盲人Steve Mahan乘坐Google Firefly无人驾驶车
推出Firefly无人驾驶车,从技术开发角度来看,这无疑是Google无人驾驶团队一次成功的尝试, 为团队积累了不少造车经验。但从产品角度来说Firefly是不成功的,一方面该车设计时速太低,相较于采用改装丰田普锐斯、Lexus RX450h 等车型采集到的数据存在数量级上的差异,这在团队内部引发了分歧:是改装现有车型,快速收集数据,还是设计无人驾驶整车,控制更多硬件?自动驾驶团队内的看法并不统一;另一方面由于整个团队长期隶属于 Google X 实验室,没有直接的商业化压力,该车尺寸小,只能乘坐两个人,商业价值不高;再者,造车这件事并不是Google无人驾驶团队所擅长的,无法有效控制成本和风险。
基于上述原因,Google决定放弃自己造车,希望能找一家“真正的汽车制造商合作”。但Firefly的对外发布,给底特律明确传达了一个信号:硅谷有能力与之一争高下。这对于传统汽车厂商来说,它们显然更希望看到一个实力超强的无人驾驶技术提供商,而不是一个竞争对手。因此,2017年Google宣布Firefly退役,该车型总共生产了大约100辆。
6)硅谷与汽车厂商寻求合作
2010年纽约时报披露了Google无人驾驶汽车的秘密,Google开始宣传其汽车项目的细节,并尝试和汽车制造商们洽谈合作。从这时底特律与硅谷之间的误解就变得司空见惯。汽车高管对于Google从DARPA举办的自驾驶汽车比赛招来的工程师不屑一顾。与此同时,Google的工程师在寻求快速将自驾驶汽车技术推向道路的过程中,也对底特律嗤之以鼻。
2011年,Google自动驾驶团队的成员曾受邀参加了通用汽车的相关活动。在封闭赛道的驾驶期间,其中一个Google工程师在转弯时有意地展示了其漂移技巧,但漂移过程中,车辆撞到了安全锥筒。当时,愤怒的通用汽车公司经理将这名谷歌工程师赶出了现场。
不过,这种尴尬场面并未能让Google知难而退。2012年,Anthony Levandowski带着Chris Urmson亲自去底特律溜了一圈。他们此行,是去找各家汽车制造商们谈合作的。俩人满心以为,那些“什么都不懂”的传统车企的Boss们会像见到救命恩人一样“跪舔”他们这些硅谷精英。谁知,当时,通用、福特等完全对Google的自动驾驶技术不屑一顾。
底特律的高管们担心,如果跟Google合作,一旦自动驾驶汽车出了安全事故,则他们将不得不替Google背锅,如此一来,自己不仅声誉会受到极大的损害,而且还得承担巨额的召回成本。在一家汽车制造商的办公室里,Google的代表们拍胸脯说:“你们应该知道,通过车辆传感器所收集的数据,我们很容易判定事故的责任方是谁。如果责任在我们,我们当然会勇敢地承担起责任来的。”
然而,对方的回答却是:“看来,你们完全是外行。汽车制造商们关注的重点从来不是责任该由谁来承担,这是律师、法官和陪审团的事情。我们要的是安全、安全、安全,你们懂吗?"
不过,随着Google自动驾驶进展的曝光越来越多,关注这项技术的人也越来越多,一些制造商的态度开始有所转变。
2014年5月28日,即谷歌发布“Firefly”的次日,通用全球产品开发主管Mark Reuss(在2019年1月份晋升为通用总裁)接受了彭博社的采访。当时,这位通用高管说:对汽车制造商们来说,谷歌可能会变成一个相当厉害的竞争对手。这是通用第一次公开将谷歌列为竞争对手。
对比起在一年前,Mark Reuss的一位下属当场对谷歌的工作人员说“没看出你们的无人车有何厉害之处”,真是时移世易啊。
不过,Mark Reuss又不甘心服输。他酸溜溜地补了一句:“其实,这也不是什么大不了的事情,只要肯花钱,谁都可以做出来。”在此前2014年第一季度末,谷歌手里有现金储备166.4亿美元,而通用手里的现金储备则有294亿美元。
其实,通用也在开发自动驾驶技术了。不过,不同于谷歌从2013年就放弃了L2级自动驾驶,直接做L4不同的是,通用的计划是,从L2逐步向L4迭代。然而,这一路线却遭到谷歌的diss。
那段时间,Google也去找过丰田,但被拒了。一方面,他们担心Google不愿分享技术;另一方面,他们担心自己会沦为Google的代工厂。
2014年之后,汽车制造商们开始近距离观察Google,并试图理解Google的意图和雄心。他们已经比较确定,Google的自动驾驶技术将对汽车产业带来巨大的冲击。
2015年1月份,Urmson在接受路透社采访时,说:“很遗憾,那几家最大的汽车制造商都不愿意坐下来跟我们谈,他们都有悠久的历史,如果我们告诉他们‘我们可以做得更好’,他们会觉得被冒犯了。”为了能顺利合作,Urmson甚至违心地说了一些向制造商们示好的话:“其实,底特律远比外人想象的更具有创新精神。”
Urmson的那几句话,通过路透社记者之口传到了通用高管的耳朵里,在同一期采访中,通用汽车CTO Jon Lauckner通过路透社的正面回应了Google:通用对跟Google合作开发自动驾驶汽车持开放态度。
但是在2015年5月份的一次TED演讲中,在不久前还希望能跟通用合作的Chris Urmson戏谑道:相信一款自动驾驶辅助系统只要不断迭代,就可以越做越好,最终达到完全的自动驾驶水平,这就相当于说“只要我努力地练习跳跃,迟早有一天,我就会飞起来”。

这是硅谷对底特律的经典鄙视。这一狂言,显然激怒了通用的高管们。要知道,Chris Umson领导的卡内基梅陇大学队在摘得2007年DARPA自动驾驶挑战赛上的冠军之前,曾拿到通用数百万美元的资助。Chirs Umson在通用的资助下成名,再回来diss通用,这太不厚道了。但当时,通用的同仁们只能隐忍不发——彼时,谷歌市值3800亿美元,而通用则只有570亿美元,并且,通用的利润率还不到谷歌的一半。因此,通用没有足够的气魄跟Google拍桌子。
此时的通用,需要韬光养晦。
2015年10月底,在一年半之前就预测到Google会成为“强劲的竞争对手”的通用全球产品开发主管Mark Reuss再次接受了彭博社的采访。这次,在谈及自动驾驶将对汽车产业带来的冲击时,Mark Reuss坦言“如果通用继续保持其当前的汽车销售模式,我们将会出局。”
同时,Mark Reuss又毫不含蓄地表达了通用希望跟Google合作的意思:“他们拥有强大的自动驾驶技术能力,但我们知道如何造车,我对两家公司如何协同合作非常感兴趣。我喜欢与他们合作,我相信,他们应该也有同样的感觉。”
这使通用成为第一家公开建议与Google合作开发自动驾驶汽车的大型汽车制造商。
通用汽车曾探索与Google建立合作。但通用的高层对于谷歌只想要通用提供汽车感到非常不满;Google认为自己是占据主动权的一方,通用汽车除了与它合作以外没有别的选择。
Google与日本汽车厂商的谈判也不成功。本田硅谷办事处主管 Nick Sugimoto 表示,Google 2014 年以前与本田的磋商没有取得进展。”他们很固执,不清楚自己想要什么。“
实际上,Google的自动驾驶项目在独立出来之前曾接触了包括沃尔沃在内的 12 家汽车厂商,为其自动驾驶技术寻求制造伙伴。但最终都无疾而终。
随着 2015 年 8 月Google业务重组,Google新任首席财务官 Ruth Porat 上任,开始控制各项目资金,并制定商业计划,Urmson 承受着成本控制与商业化双重压力。
鉴于硅谷科技行业与汽车行业在发展无人驾驶技术合作的僵持与不信任,Google的创始人佩奇和布林认为他们需要找一个在汽车行业有影响的人,这个人熟悉汽车生态系统的规则,能够很好的将硅谷科技行业与汽车行业连接起来。
这个人就是John Krafcik。John Krafcik 理解硅谷,也理解传统汽车行业:他毕业于斯坦福大学,在硅谷工作过两年,伺候在福特和现代汽车有着漫长的职业生涯,而且也表现出了出色的管理的能力:在福特,他一路做到总工程师的位置;在现代汽车,他作为北美 CEO,在其他汽车公司与 2008 年的金融危机濒临破产时,却实现了现代汽车的收入增长。

Google 2015年9月任命John Krafcik为其自动驾驶/无人驾驶汽车项目CEO,以加快该项目商业化进程。Krafcik 能否将两个行业连接起来,在很大程度上决定了机器汽车市场未来的形态,同时决定了谁能从中获益。
历史上,一个由技术驱动的项目要实现商业化常常会付出这样的代价——团队分崩离析与人员大换血。Google的自动驾驶项目也不例外。
7)Google无人驾驶核心人员集体出走
随着职业经理人Krafcik加盟,组织架构调整,加上成本控制,这使得以 Urmson 为首的技术派已经不再是权力中心。
进入谷歌后,Krafcik 直接谈了笔大业务,在他的主导下谷歌差点与福特(Krafcik 的老东家)达成合作。不过,时任福特 CEO 的 Mark Fields 到谷歌总部吃了一顿饭后,合作泡汤了。据悉,两家巨头最终谈崩主要是因为 Fields 定的时间线太快了。Krafcik 表示,这次合作最终告吹是因为福特定的条款有失公平。“对我们来说这可不是个好协议。”他说道。“自动驾驶技术本就有风险,在车辆规格上我们也是考虑多年。福特在协议上撇清了自己的风险,一旦出了问题,我们得独自面对重大的资金风险。”不过对于此事,福特发言人拒绝发表评论。
在Google,八面玲珑的 Krafick 也嗅到了Google无人驾驶团队内部的不和气氛。作为Google自动驾驶项目的创始工程师,Anthony Levandowski 与当时的项目负责人 Chris Urmson 积怨已久,而Krafcik 来这里就是当“和事佬”。不过,Krafcik 也没能解决两人的矛盾,Levandowski 最终选择离职创业,临走他还给 Page 发了一封电邮批评了 Krafcik(涉及与福特的合作和自动驾驶汽车团队的分拆)。
后来的事大家都清楚,Levandowski 创立 Otto 后又曲线加入 Uber,最终他因盗窃商业机密的罪名被老东家告上法庭。在巨大的压力下,Levandowski 只能选择辞职,而 Uber 也不得不赔偿 2.45 亿美元和解了事。
2016 年1月,紧随Levandowski之后,大批参与Google无人驾驶项目的核心人员离职,时任Google地图原负责人 Lior Ron、硬件研发主管 Bryan Salesky、机器视觉技术专家 Dave Ferguson 和朱佳俊等其他十几位工程师也一起离开。
笼络福特未果后,Krafcik 终于说服了菲亚特-克莱斯勒。不过,这个兴奋劲还没过, Urmson 就宣布辞职(2016 年8 月)。
关于 Urmson 的离职动机,《纽约时报》给出了两点猜测:
John Krafcik 担任自动驾驶车辆负责人,可能是让 Urmson 萌生去意的导火线;Urmson 在数月前与 佩奇在私底下针对Google自动驾驶车辆的发展方向有过争吵。Urmson 当时对自动驾驶的技术前景及商业化预期与创始人佩奇不一致,发生争执之后负气出走。
争执背后,很大程度上,是佩奇对自动驾驶商业化进度不满。
理念不合或许成为谷自动驾驶项目人才流失的一个催化剂。但也有分析人士认为背后更深层的重要原因是:Google付给这群工程师的报酬太高了。
Google汽车项目的早期员工享受了一套不同寻常的薪酬制度,可以根据项目价值获得高额薪水。对此知情人士透露,Google这一不算正统的薪酬激励体系开始于2010年,Google当时的目的是为了将员工的命运与项目表现连为一体,而不必受制于Google广告业务。
除了现金工资外,一些员工还能获得奖金和股权,并将其保留在一个特殊实体内。经过几年之后,Google在这笔奖励上增加一个乘数,然后将其中的部分或全部资金支付给员工。具体的乘数取决于该部门的周期性估值。
知情人士透露,这种做法的部分问题在于,在达到关键的节点后,即便最终的项目目标“通过商业服务面向公众提供全自动驾驶汽车”,还有好几年才能达到,但员工薪水却会像滚雪球一样越滚越大。
2015 年,Google的自动驾驶项目达到了早年约定的研发进度,当时Google自动驾驶项目估值 85 亿美元,薪资乘数在2015年末大幅扩大,Google拿出 45 亿美元当作奖金。2015 年 12 月,Levandowski 从Google拿走了 5000 万美元奖金,比 Urmson 几乎高了一倍(2800 万美元)。这种高额的奖金使得其中一些老员工已经不再面临职业安全问题,因而可以更加开放地接受其他工作机会。
谷歌发放这笔奖金的时间节点是在 2015 年底。在拿到巨额奖金后,这些核心工程师都相继离职了。
一方面,其中一些员工对自动驾驶汽车项目的进展感到失望,而且对新的领导者 John Krafcik 的能力并不信任;另一方面,还有员工想创建自己的自动驾驶汽车公司。而高额的报酬加剧了这种情况,因为团队成员缺少继续留下来的财务激励。
从今天再回过头看,当年离职的这一批人,大都走上了创业的道路,并都已是这一领域的独角兽:
Google自动驾驶项目前负责人 Chris Urmson 、特斯拉 Autopilot 项目前负责人 Sterling Anderson 和 Uber ATC 自动驾驶前负责人 Drew Bagnell 创立的 Aurora,如今估值 25 亿美金;
Levandowski 与 Ron 创办的 Otto 后被 Uber 以 6.8 亿美金价格收购;
Dave Ferguson 和朱佳俊创办的 Nuro,在拿到软银愿景基金 9.4 亿投资后,如今估值 27 亿美金;
Bryan Salesky 创办的 Argo 被福特买下,有传闻大众将投资 Argo,估值 40 亿美金。
可以说,Google的自动驾驶项目,才是自动驾驶界的“西点军校”,人才流动催熟了整个自动驾驶行业的蓬勃发展。
在 Urmson 走后,Dmitri Dolgov 就接管了技术团队。他成为了这支团队的首席技术执行官,也是软件工程部的主管。

Dmitri Dolgov
Dolgov 原本有机会成为成为这个部门的一把手,但他还是将位置让给了“空降兵”John Krafcik。“空降兵”和管理者 Krafcik 与 工程师 Dolgov 有着天然鸿沟。Dolgov 虽然不满 Krafcik 总是无条件赞成佩奇与布林对项目的指挥,以及“缺乏对自动驾驶系统的技术知识”。但好在 Krafick 有足够的能力来管理这个顶尖技术团队。
Dolgov 是莫斯科物理与技术学院的硕士,在密歇根大学拿到了计算机科学博士学位。随后他又在斯坦福获得博士后学位。整个职业生涯中,Dolgov 已经拿到了超过 90 项重大专利。与早期核心员工一样,Dolgov 的履历上也有 DARPA 自动驾驶挑战赛这个经历,参与该项目时他是 Sebastian Thrun 团队(斯坦福大学)的重要一员。在结束了自己的学生生涯后,他加入丰田研究所任高级科学家,不过 2009 年他被 Thrun 引荐到了谷歌自动驾驶汽车部门。这位出生于俄罗斯的高级工程师,被现任与前任同事描述为“一位异常认真,却又心态平和,且对痛苦有着高容忍度的领导者”。这个形容,意味着他有能力忍受技术阻碍与官僚大山的双重挑战。
自 Urmson 离开后,Dolgov 在团队内部发挥了更加积极的作用,扮演着一个典型的公众角色。在某种意义上,Dolgov 是整个谷歌自动驾驶团队(即后来的 Waymo)的“运作中枢”。尽管 2016 年前后 Google 自动驾驶项目曾流失若干位顶级工程师,但大多数人都留在了公司,与 Dolgov 进行研发合作。内部员工曾经这么评价他:“他是那个地方把各个部门串起来的粘合剂。”
8)成立Waymo,让自动驾驶汽车走向商用
Google无人驾驶项目核心团队成员的离职,并未造成自动驾驶项目就此停滞不前。从另一个角度看,在每一个特殊的时间节点上,一些重要成员的离职或入职,都意味着Google的自动驾驶项目又走上了一个新的征程。
关于Krafcik 被雇佣的原因,有两位知情人士曾披露:Krafcik 被聘用是因为布林和佩奇对 Chauffeur 项目的推进不再抱有希望(异常失望)。当初在决定要招“空降兵”时,他们就曾设立了一个目标——要在 2016 年底推出无人车的商用服务。
Chauffeur项目不能永远停留在Google X实验室,需要尽快落地应用。
2016 年 12 月,谷歌母公司 Alphabet 宣布Google自动驾驶项目将作为公司内部一个名为“Waymo”的独立实体存在,Waymo所代表的意思是:"A new way forward in mobility"(未来新的移动方式),这也代表着 Waymo 对未来出行的愿景。Krafcik出任Waymo CEO, Dolgov出任CTO。
在Waymo成立的同时,还伴随着另外一种声音:Waymo 正在重蹈上世纪七十年代施乐(Xerox)的覆辙。施乐发明了现代个人电脑,却未能有效地将其商业化——原因在于成本高昂,没有足以吸引付费客户的最简产品。
尽管面临类似的商业化困境,但Krafcik决定先从几个困惑大家的问题开始着手。
第一,Google是不是一定要坚持放弃方向盘技术路线?
第二,Google是不是一定要自己造车?
第三,Google如何解决和传统汽车厂商的关系?
关于放弃方向盘的技术路线,如果想和传统汽车厂商合作,同时获得更多监管机构的批准认可,那么保留传统方向盘和踏板控制器就成了Google无法回避的选择。佩奇和 CFO Ruth Porat 后来终于转变观念,从实际合作的角度出发,多次对外表示Google放弃方向盘的设计有些“不切实际”。
关于造车的问题。自动驾驶项目内部人员也在争辩Google该不该从头至尾地打造一辆自己的自动驾驶汽车。自己造硬件?或者与其他品牌合作?这种困境和Google在手机上的遭遇一模一样。作为手机软件,安卓无疑是成功的,大量的手机品牌都在使用安卓操作系统。但是,与苹果在智能手机上的战斗让谷歌学到了不少教训:Google就是自己生产手机,研发手机系统,然后成功了。但是,造车显然要难得多,特别是面临着老牌汽车厂商的竞争。另一方面,Waymo 的工程师们也不懂汽车行业,这导致双方合作并不愉快。如与大部分车企(福特、通用、本田等)的分道扬镳。Waymo 在尝试整车制造(已经退役的 Firefly)后,已经明白自己是一家擅长软件的公司,它涉足整车制造是不切实际的。因此 Waymo 需要做的,就是寻找汽车厂商进行合作。
既然Google不造车,那就要寻求与汽车公司的合作,但是Waymo 与传统车企的关系并不友好。实际上,硅谷瞧不起没什么科技含量的普通制造工作。底特律担心沦为代工厂,给科技公司做嫁衣。而且,在硅谷,这里的研究人员往往倾向于以高人一等的态度对待底特律或者其它地方的传统汽车研发人员。他们认为,如果未来的汽车本质上是一台有轮子的超级计算机,谁能比计算机科学家更适合去设计它呢?类似这样的根深蒂固的观念,是需要解决和疏通的,硅谷科技公司与传统汽车行业的裂痕需要修复。而Krafcik就是那个在合适不过的人了,他会说两种“语言”:汽车之城底特律和硅谷的语言。在他加入 Waymo 之后,则在试图修补与汽车厂商的关系。他会从传统汽车厂商的角度想问题,找到更好的商业模式来促使它们与 Waymo 进行合作。尽管没有撮合福特、现代与 Waymo 的合作,但在他的主导下,Waymo 成功与菲亚特-克莱斯勒、捷豹路虎以及租车公司 Avis、Lyft 的合作,都在推动这项技术向商业产品转化。
通过解决这些问题,Waymo 终于找准自己的定位了,用 John Krafcik 的话来说:“我们是一家自动驾驶技术公司,不是一家汽车公司,关于这点存在很多的误解,Waymo 的业务并不是为了制造更好的汽车,而是为了创造更好的司机。”超过 10 年的经验教训,终于让 Waymo 摸清了河里的石头,造就了其在自动驾驶领域的标杆地位。
2018 年,摩根斯坦利给出 Waymo 1750 亿美元的估值。而在前一年,摩根斯坦利对 Waymo 给出的估值仅为 700 亿美元。一年时间,Waymo 估值从 700 亿美元飙升至 1750 亿美元,恐怕要拜 Waymo CEO John Krafcik 宏大的市场化策略所赐。
Krafcik 说 Waymo 打造的软硬件一体化自动驾驶系统最终应用在四个领域:
1、叫车服务;
2、无人驾驶卡车物流;
3、将无人驾驶技术授权给汽车厂商开发私家车;
4、最后一公里服务,即运送乘客去公共交通站。
可以这么说,Waymo 不但要做自动驾驶打车服务,还要在物流/递送服务和技术授权上发力。
摩根斯坦利在对 Waymo 进行估值时考虑到了这三大块业务:
第一块业务:自动驾驶出租车,其估值为 800 亿美元。
摩根斯坦利在报告中写道:
首先,我们相信 Waymo 今年有能力在凤凰城推出自动驾驶打车服务。
此前我们已经对这块业务进行过详细分析,而在最新的模型中,即假设 Waymo 出租车未来 20 年内每英里收费为 0.9 美元,且达到全球出租车运营里程的 4%(不包括中国市场)。那么,这部分业务就值 800 亿美元。
第二块业务:物流/递送服务,它比自动驾驶出租车前途更广,估值达 900 亿美元。
在摩根斯坦利看来,运货比运人更能创造价值。“自动驾驶汽车最终将带来更快且更为廉价的最后一公里递送解决方案,它能在 1 小时之内完成本地商店到用户家门口的递送服务,这比中央仓储配送的模式体验更好,还能缩减线上线下的利润差距。Waymo 甚至能帮助传统零售商更好地抗衡亚马逊(从成本和服务角度)”。
再加上自动驾驶技术为长途运输带来的革命,摩根斯坦利认为这部分业务估值 900 亿美元完全没有水分。
第三块业务:软件和技术授权,值 70 亿美元。
以 Waymo 和菲亚特-克莱斯勒和路虎捷豹现在的关系来看,未来肯定会有一部分传统汽车厂商从 Waymo 手中购买自动驾驶软件和技术的授权。
“在我们看来,随着算法的不断改进,Waymo 能拿出最智能和最安全的自动驾驶产品。”摩根斯坦利在报告中解释。“如果 Waymo 技术驱动的 Level 4/Level 5 级别自动驾驶在 2040 年能达到保有总量的 7%,70 亿美元落袋肯定没问题。”
摩根斯坦利的这份报告也让我们看到:原来软件和技术授权的市场价值并不如自动驾驶出租车和物流/递送服务。这也不得不引发思考:软件和技术授权对初创公司而言,是不是一条商业化的好路子?
当然,直奔 2000 亿美元的体量也让我们不得不重新审视 Waymo 这家公司。
种种迹象表明,Waymo 自动驾驶商业化运营呼之欲出。从外部看,2018 年,Waymo 砸巨资直接从菲亚特-克莱斯勒订购了 6.2 万辆 Pacifica,又从捷豹订购了 2 万辆 I-Pace。未来这 8.2 万辆 Pacifica 将成为其自动驾驶打车服务的中流砥柱。

Waymo与菲亚特-克莱斯勒合作的Pacifica,将用于自动驾驶打车服务
2018 年 12 月,Waymo 自动驾驶打车服务的产品 Waymo One 正式上线。你可以将 Waymo One 看作是 Uber、滴滴或是 Lyft 的竞争者,只不过驾驶员换成了机器而已。
从内部看,2017年底,Deborah Hersman 加入 Waymo,担任 Waymo 首位首席安全官。Hersman 并非等闲之辈。在加入 Waymo 前,她曾是美国国家交通安全委员会主席和国家安全理事会 CEO。
进入 2019 年,Waymo 更是动作不断。
1 月8日,Waymo 与包括奥迪、Aurora、Cruise、通用汽车、Mobileye、英伟达、丰田和 Zoox 在内的多家汽车厂商、科技公司和与汽车有关的机构组建了 PAVE 联盟。PAVE 的目标是向公众和决策者宣传自动驾驶汽车的潜力。“公众认识”是联盟成立诉求,而这点诉求恰恰又是自动驾驶能够顺利实现商业化走向市场的重要因素。
1月22日,Waymo 宣布在密歇根建设组装厂来生产自动驾驶汽车,全球首个专注于量产 L4 级别自动驾驶车辆的工厂上线。
2月中旬,美国加州车辆管理所(DMV)公布了2018年度的自动驾驶路测数据。在提交报告的48家企业中,Waymo以127万英里的里程数一马当先。
2月21号,2月21日,Waymo公布了一个视频,展示了其自动驾驶汽车可听从交警的信号的能力。
3月6日,Waymo宣布,将开始向其他公司出售其用在自动驾驶汽车上的定制激光雷达传感器。
3月11日,据The Information网站报道,Waymo或将以Cruise至少几倍的估价首次寻求外部投资。
5月29日,Waymo在推特上宣布,阔别一段时间之后,该公司的完全自动驾驶卡车测试项目将重返亚利桑那州的凤凰城都会区。Waymo将其自动驾驶系统集成到8级卡车中,并于2017年8月在亚利桑那州开始测试。2017年底,该公司停止了在亚利桑那州公共道路的测试,原因不明。
6月17日,有人发现一辆配备了安全驾驶员的自动驾驶捷豹I-Pace汽车正在公共道路上行驶,而且Waymo也已经确认测试已经开始。Waymo还计划于2020年将I-PACE汽车纳入到自动驾驶网约车车队中,正式开始商业化自动驾驶出行服务。
6月20日,Waymo与雷诺-日产-三菱联盟签署了一份自动驾驶汽车商业化服务协议。
7月,Waymo对外公布了所达成的最新里程碑:模拟自动驾驶测试总里程已经达到了100亿英里(约合160亿公里),而去年9月份这一数字为50亿英里(约合80亿公里)。Waymo认为,这是一个十分重要的节点,因为模拟测试里程在自动驾驶软件的完善过程当中将会发挥重要的作用,为软件的训练提供重要的经验。
7月,为了确保自动驾驶车辆能够应付多种不同的天气条件,Waymo开始在弗罗里达州进行自动驾驶雨天测试,Waymo此前已经开始在加利福尼亚州之外的地方进行测试工作。例如,已经在密歇根州进行了冬季测试。
7月,Waymo宣布开源其训练自动驾驶汽车算法的部分数据集Waymo Open Dataset,以促进自动驾驶汽车场景理解和行为预测研究。
8月29日,Waymo敦促美国国家公路交通安全管理局(NHTSA) “迅速”消除对无人驾驶汽车(没有方向盘和刹车踏板)的规则障碍。目前,汽车制造商必须达到近75条自动驾驶汽车的安全标准,而其中许多标准都是基于执照司机使用传统控制系统控制汽车的假设。
10月左右,Waymo的自动驾驶汽车克莱斯勒Pacifica又开进了另一个测试城市:加州洛杉矶。Waymo表示,已经开始在洛杉矶绘制道路地图,以建立自动驾驶汽车所需的数据库。这是该公司继扩张至诺维、柯克兰、华盛顿、旧金山、菲克尼斯和迈阿密等城市后的最新一次扩张。
10月下旬,Waymo首席执行官John Krafcik正式确认,公司旗下完全无人驾驶出租车已经在美国亚利桑那州部分地区上线。美国当地时间10月28日,一位网友也在道路上拍到了正在运行中的Waymo无人驾驶出租车,车内已经没有安全员。
12月,Waymo的自动驾驶服务在凤凰城地区上线一年之后,该公司推出了这项服务的iOS版应用,标志着该公司距离自动驾驶大规模商用又前进了一步。现在凤凰车的居民可以在iPhone上下载Waymo应用,注册后在手机上直接呼叫自动驾驶出租车。
12月,Waymo收购了一家从牛津大学(Oxford University)剥离出来的初创公司Latent Logic意图加强自己的仿真技术,后者研发了一个“模仿学习”系统,它通过“模仿学习”的方式对人类行为进行仿真,可以用于车辆测试。
。。。。。。
10 年的发展,已经使 Waymo 具备了赢得自动驾驶这场比赛的技术、市场以及资金。
可以说,论自动驾驶技术的领先或是经验的积累程度,Waymo 目前的成绩都是鲜有公司能够企及。
尽管 Waymo 在自动驾驶方面已经取得了巨大进步,但 Waymo 软件工程总监 Sacha Arnoud 使用了 90-90 法则的变体来描述 Waymo。
他说,从 Waymo 的经验来看,前 90% 的技术工作量只占总工作时间 10%,而要完成最后的 10% 的工作,需要再花 10 倍的气力。
Krafcik 也承认,“这是一个相当漫长的过程,自动驾驶技术挑战性十足,我们可能需要花一定的时间才能实现真正的自动驾驶。”
显然,自动驾驶汽车的研发是一场马拉松,而不是百米冲刺。就阶段而言,Waymo 依然是当之无愧的自动驾驶之王。
Waymo的精彩还将继续。