1、原理
图象边缘就是图像颜色快速变化的位置,对于灰度图像来说,也就是灰度值有明显变化的位置。图像边缘信息主要集中在高频段,图像锐化或检测边缘实质就是高通滤波。数值微分可以求变化率,在图像上离散值求梯度,图像处理中有多种边缘检测(梯度)算子,常用的包括普通一阶差分,Robert算子(交叉差分),Sobel算子,二阶拉普拉斯算子等等,是基于寻找梯度强度。
Canny 边缘检测算法是John F. Canny 于1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的 最优算法, 最优边缘检测的三个主要评价标准是:
低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
最小响应: 图像中的边缘只能标识一次。
Canny算子求边缘点具体算法步骤如下:
1. 用高斯滤波器平滑图像.
2. 用一阶偏导有限差分计算梯度幅值和方向.
3. 对梯度幅值进行非极大值抑制.
4. 用双阈值算法检测和连接边缘.
2、实现步骤
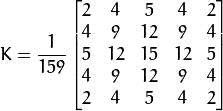
2.1、消除噪声
使用高斯平滑滤波器卷积降噪。下面显示了一个 size = 5 的高斯内核示例:
2.2、计算梯度幅值和方向
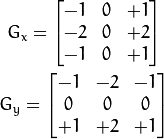
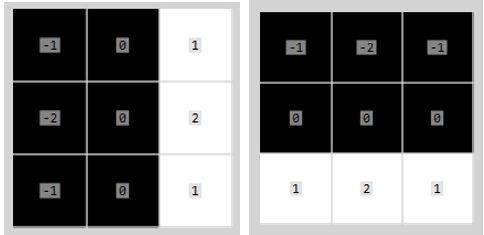
按照Sobel滤波器的步骤,计算水平和垂直方向的差分Gx和Gy:
在vs中可以看到sobel像素值和形状:
梯度幅值和方向为:
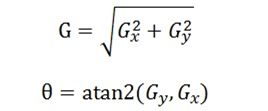
梯度方向近似到四个可能角度之一(一般 0, 45, 90, 135)。
2.3、非极大值抑制
非极大值抑制是指寻找像素点局部最大值。sobel算子检测出来的边缘太粗了,我们需要抑制那些梯度不够大的像素点,只保留最大的梯度,从而达到瘦边的目的。沿着梯度方向,比较它前面和后面的梯度值,梯度不够大的像素点很可能是某一条边缘的过渡点,排除非边缘像素,最后保留了一些细线。
在John Canny提出的Canny算子的论文中,非最大值抑制就只是在0、90、45、135四个梯度方向上进行的,每个像素点梯度方向按照相近程度用这四个方向来代替。梯度向量的每个四分之一圆被45°线分成两种情况,一种情况是倾向于水平,另一种倾向于竖直,一共 8 个方向。这种情况下,非最大值抑制所比较的相邻两个像素就是:
1) 0:左边 和 右边
2) 45:右上 和 左下
3) 90:上边 和 下边
4)135:左上 和 右下
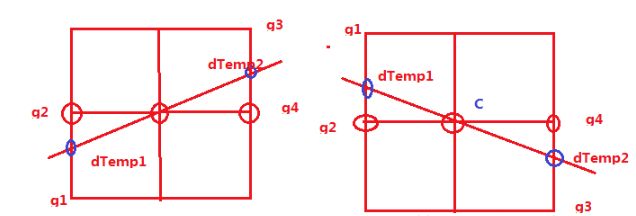
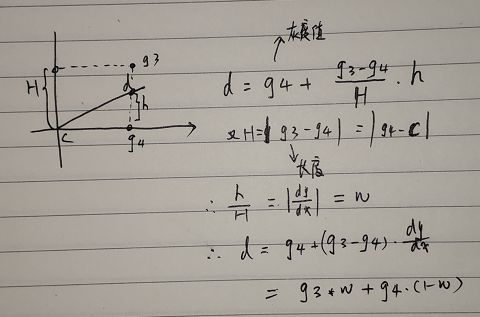
这样做的好处是简单,但是这种简化的方法无法达到最好的效果,因为自然图像中的边缘梯度方向不一定是沿着这四个方向的,即梯度方向的线并没有落在8邻域坐标点上。因此,就有很大的必要进行插值,找出在一个像素点上最能吻合其所在梯度方向的两侧的像素值。
如果|gx|>|gy|,这说明该点的梯度方向更靠近X轴方向,所以g2和g4则在C的左右,我们可以用下面来说明这两种情况(方向相同和方向不同):
可以使用插值计算出真实梯度值:
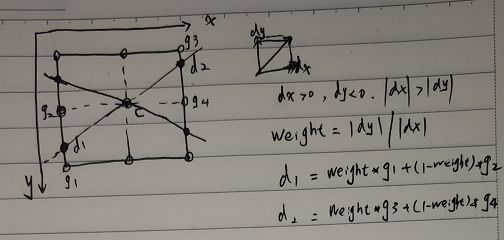
其中,插值计算方式为:dTemp1 = weight*g1 + (1-weight)*g2; dTemp2 = weight*g3 + (1-weight)*g4;
Matlab使用非常有技巧的方式来计算方向,如下不仅做了dx、dy的大小判断还做了方向的判定。
witch direction case 1 idx = find((iy<=0 & ix>-iy) | (iy>=0 & ix<-iy)); case 2 idx = find((ix>0 & -iy>=ix) | (ix<0 & -iy<=ix)); case 3 idx = find((ix<=0 & ix>iy) | (ix>=0 & ix<iy)); case 4 idx = find((iy<0 & ix<=iy) | (iy>0 & ix>=iy)); end
2.4、双阈值检测和区域连通
最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值)。如果边缘像素的梯度值高于高阈值,则将其标记为强边缘像素;如果边缘像素的梯度值小于高阈值并且大于低阈值,则将其标记为弱边缘像素;如果边缘像素的梯度值小于低阈值,则会被抑制。阈值的选择取决于给定输入图像的内容。Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
3、代码实现
3.1 计算梯度
/* * Sobel 梯度计算 */ Mat gradients(Mat &img, Mat &sobel) { int W = img.cols; int H = img.rows; Mat dx = Mat_<int>(img.size()); int border = (int)sobel.rows / 2; for (int r = border; r < H - border; r++) { for (int c = border; c < W - border; c++) { float tmp = 0; for (int i = -border; i <= border; i++) { for (int j = -border; j <= border; j++) { tmp += (int)img.data[(r + i)*W + c + j] * sobel.at<int>(i + border, j + border); } } dx.at<int>(r, c) = tmp; } } return dx; }
3.2计算非极大值抑制(详细推导过程见参考文献文章)
/* fucntion: non-maximum suppression input: pMag: pointer to Magnitude, pGradX: gradient of x-direction pGradY: gradient of y-direction sz: size of pMag (width = size.cx, height = size.cy) limit: limitation output: pNSRst: result of non-maximum suppression */ void NonMaxSuppress(int *pMag, int * pGradX, int *pGradY, Size sz, int *pNSRst) { long x, y; int nPos; // the component of the gradient int gx, gy; // the temp varialbe int g1, g2, g3, g4; double weight; double dTemp, dTemp1, dTemp2; //设置图像边缘为不可能的分界点 for (x = 0; x < sz.width; x++) { pNSRst[x] = 0; pNSRst[(sz.height - 1)*sz.width + x] = 0; } for (y = 0; y < sz.height; y++) { pNSRst[y*sz.width] = 0; pNSRst[y*sz.width + sz.width - 1] = 0; } for (y = 1; y < sz.height - 1; y++) { for (x = 1; x < sz.width - 1; x++) { nPos = y * sz.width + x; // if pMag[nPos]==0, then nPos is not the edge point if (pMag[nPos] == 0) { pNSRst[nPos] = 0; } else { // the gradient of current point dTemp = pMag[nPos]; // x,y 方向导数 gx = pGradX[nPos]; gy = pGradY[nPos]; //如果方向导数y分量比x分量大,说明导数方向趋向于y分量 if (abs(gy) > abs(gx)) { // calculate the factor of interplation weight = fabs(gx) / fabs(gy); g2 = pMag[nPos - sz.width]; // 上一行 g4 = pMag[nPos + sz.width]; // 下一行 //如果x,y两个方向导数的符号相同 //C 为当前像素,与g1-g4 的位置关系为: //g1 g2 // C // g4 g3 if (gx*gy > 0) { g1 = pMag[nPos - sz.width - 1]; g3 = pMag[nPos + sz.width + 1]; } //如果x,y两个方向的方向导数方向相反 //C是当前像素,与g1-g4的关系为: // g2 g1 // C // g3 g4 else { g1 = pMag[nPos - sz.width + 1]; g3 = pMag[nPos + sz.width - 1]; } } else { //插值比例 weight = fabs(gy) / fabs(gx); g2 = pMag[nPos + 1]; //后一列 g4 = pMag[nPos - 1]; // 前一列 //如果x,y两个方向的方向导数符号相同 //当前像素C与 g1-g4的关系为 // g3 // g4 C g2 // g1 if (gx * gy > 0) { g1 = pMag[nPos + sz.width + 1]; g3 = pMag[nPos - sz.width - 1]; } //如果x,y两个方向导数的方向相反 // C与g1-g4的关系为 // g1 // g4 C g2 // g3 else { g1 = pMag[nPos - sz.width + 1]; g3 = pMag[nPos + sz.width - 1]; } } dTemp1 = weight * g1 + (1 - weight)*g2; dTemp2 = weight * g3 + (1 - weight)*g4; if(dTemp ) //当前像素的梯度是局部的最大值 //该点可能是边界点 if (dTemp >= dTemp1 && dTemp >= dTemp2) { pNSRst[nPos] = dTemp; } else { //不可能是边界点 pNSRst[nPos] = 0; } } } } }
3.3双阈值检测和边缘连接
void duble_threshold(Mat &pMag, Mat &pThreadImg, float threshold) { double maxv; int * img_ptr = pMag.ptr<int>(0); uchar * dst_ptr = pThreadImg.ptr(0); minMaxLoc(pMag, 0, &maxv, 0, 0); cout << "max" << maxv << endl; int TL = 0.333 * threshold *maxv; // 1/3 of TH int TH = threshold *maxv; int w = pMag.cols; int h = pMag.rows; for (int r = 1; r < pMag.rows; r++) { for (int c = 1; c < pMag.cols; c++) { int tmp = img_ptr[r*w + c]; if (tmp < TL) { dst_ptr[r*w + c] = 0; } else if (tmp >= TH) { dst_ptr[r*w + c] = 255; } else { bool connect = false; for(int i=-1; i<=1 && connect == false; i++) for (int j = -1; j <= 1 && connect == false; j++) { if (img_ptr[r + i, c + j] >= TH) { dst_ptr[r*w + c] = 255; connect = true; break; } else dst_ptr[r*w + c] = 0; } } } } }
4、测试结论
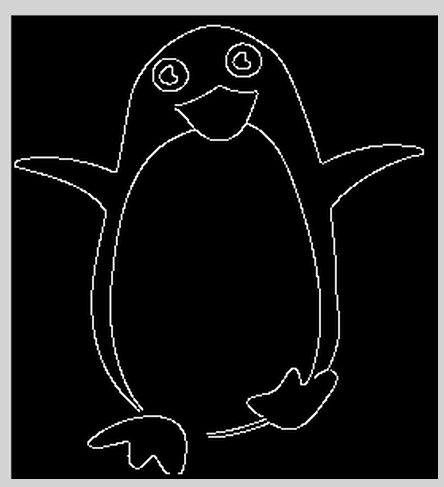
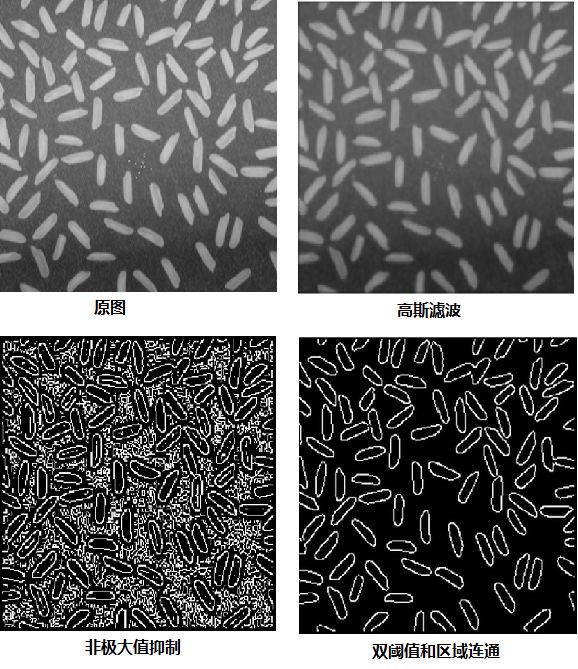
测试1:左侧是原图,右侧是进行了sobel梯度计算和非极大值抑制后的图。
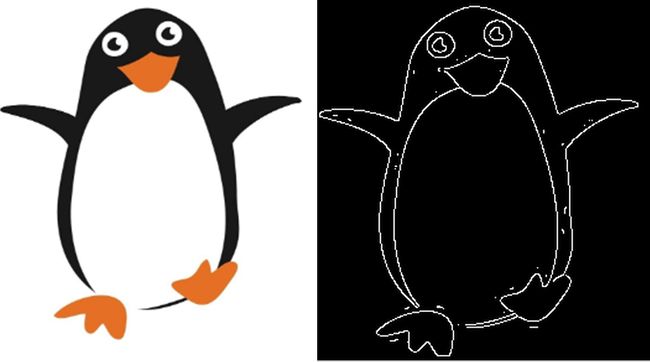
可见右图,在企鹅轮廓内部还有孤立的点,放大后如下图。
使用双阈值限定后如下图,内部点消失了。
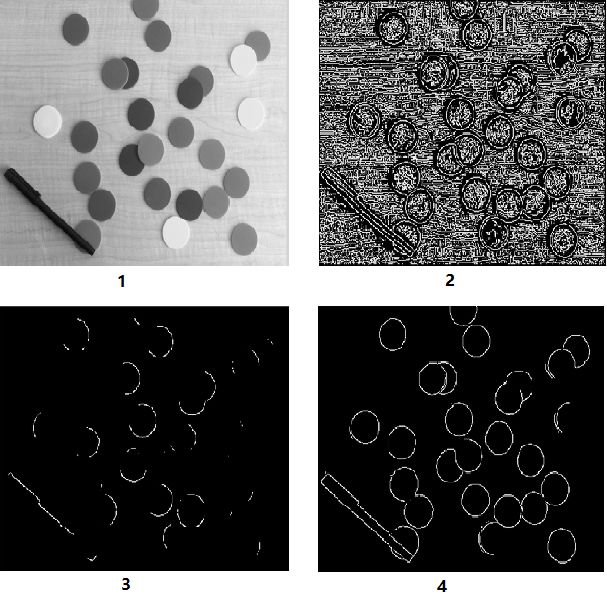
测试2:选择合适的阈值,图像中心的白色噪点可以消除。
测试3:
如下图,图2的双阈值计算梯度后最大梯度360,图3使用0.5倍高阈值,轮廓不连贯,可见阈值过高。改为0.2倍高阈值,结果如图4,改善了轮廓缺失问题。
 5、参考文献
5、参考文献
1、《数字图像处理与机器视觉》,第二版。 张铮、徐超、任淑霞、韩海玲等编著。
2、Canny 边缘检测
http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/imgtrans/canny_detector/canny_detector.html
3、Sobel算子的数学基础
http://blog.sciencenet.cn/blog-425437-1139187.html
4、Canny边缘检测
https://www.cnblogs.com/mmmmc/p/10524640.html
5、Canny算子中的非极大值抑制(Non-Maximum Suppression)分析
https://blog.csdn.net/kezunhai/article/details/11620357
6、一种改进非极大值抑制的Canny边缘检测算法
https://www.doc88.com/p-5174766661571.html
个人博客,转载请注明。
https://www.cnblogs.com/pingwen/p/12489703.html