中值滤波原理通过一张图就可以看明白:
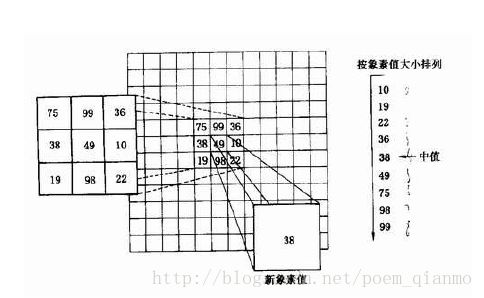
简言之中值滤波就是把函数框(如图中的3 X 3)内的灰度值按顺序排列,然后中值取代函数框中心的灰度值。所以一般采用奇数点的邻域来计算中值,但如果像素点数为偶数,中值就取排序像素中间两点的平均值。
中值滤波在一定的条件下可以克服常见线性滤波器如方框滤波器、均值滤波等带来的图像细节模糊,而且对滤除脉冲干扰及图像扫描噪声非常有效,也常用于保护边缘信息, 保存边缘的特性使它在不希望出现边缘模糊的场合也很有用,是非常经典的平滑噪声处理方法。
但是中值滤波的缺点也很明显,因为要进行排序操作,所以处理的时间长,是均值滤波的5倍以上。
中值滤波在OpenCV中用medianBlur函数实现,下面是函数声明:
voidmedianBlur(InputArray src,OutputArray dst,intksize);
参数很简单,就是输入图像src,输出图像dst,以及核的大小ksize。注意这里的ksize必须为正奇数1,3,5,7……否则程序会出错。
三、双边滤波
双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。具有简单、非迭代、局部的特点。
双边滤波器的好处是可以做边缘保存(edge preserving),一般用高斯滤波去降噪,会较明显地模糊边缘,对于高频细节的保护效果并不明显。双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,它是基于空间分布的高斯滤波函数,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存。但是由于保存了过多的高频信息,对于彩色图像里的高频噪声,双边滤波器不能够干净的滤掉,只能够对于低频信息进行较好的滤波。
下图是双边滤波的原理示意图:
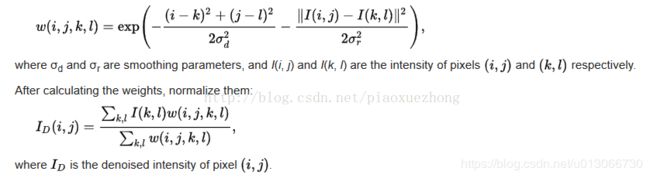
在双边滤波器中,输出像素的值依赖于邻域像素值的加权值组合:
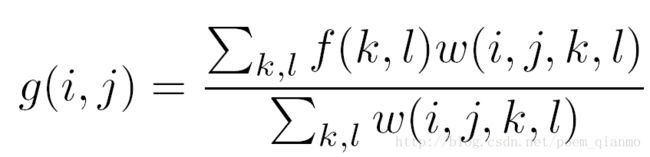
而加权系数w(i,j,k,l)取决于空域核和值域核的乘积。
(i,j),(k,l)分别指两个像素点的坐标。
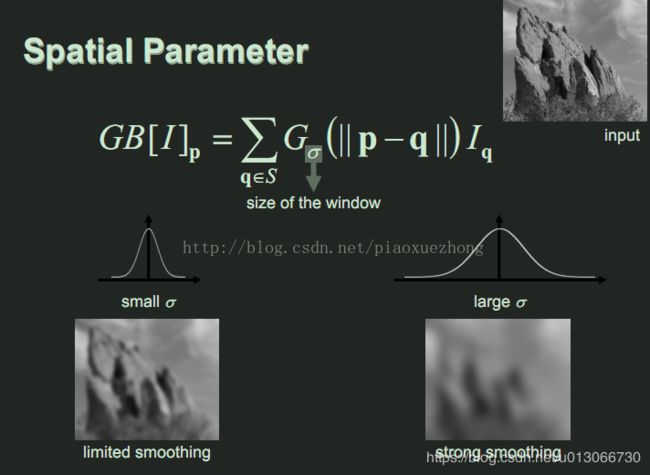
其中空域核表示如下(如图):

值域核表示为:

两者相乘后,就会产生依赖于数据的双边滤波权重函数:

d函数是根据像素距离选择权重,距离越近权重越大,这一点和方框滤波,高斯滤波方式相同。而r函数则是根据像素的差异来分配权值。如果两个像素值越接近,即使相距较远,也比差异大而距离近的像素点权重大。正是r函数的作用,使得边缘,即相距近但差异大的像素点的特性得以保留。
OpenCV中用medianBlur函数实现双边滤波。
函数声明:
voidbilateralFilter(InputArray src,OutputArray dst,intd,doublesigmaColor,doublesigmaSpace,intborderType=BORDER_DEFAULT);
参数:
第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。
第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。
第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。
第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。
四、示例代码:
#include"opencv2/core/core.hpp
"#include"opencv2/highgui/highgui.hpp
"#include
#include
using namespace cv;
intmain()
{
Mat img=imread("dog.jpg");//据说丑女经过双边滤波用有美颜效果哦,有兴趣的同学可以试试
Mat out1,out2,out3;
medianBlur(img,out1,35);
bilateralFilter(img,out2,25,25*2,25/2);
namedWindow("中值滤波",2);
imshow("中值滤波",out1);
namedWindow("双边滤波",2);
imshow("双边滤波",out2);
waitKey(0);
return0;
}

双边滤波算法原理
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。和其他滤波原理一样,双边滤波也是采用加权平均的方法,用周边像素亮度值的加权平均代表某个像素的强度,所用的加权平均基于高斯分布[1]。最重要的是,双边滤波的权重不仅考虑了像素的欧氏距离(如普通的高斯低通滤波,只考虑了位置对中心像素的影响),还考虑了像素范围域中的辐射差异(例如卷积核中像素与中心像素之间相似程度、颜色强度,深度距离等),在计算中心像素的时候同时考虑这两个权重。 公式1a,1b给出了双边滤过的操作,Iq为输入图像,Ipbf为滤波后图像:

mark下双边滤波里的两个权重域的概念:空间域(spatial domain S)和像素范围域(range domain R),这个是它跟高斯滤波等方法的最大不同点。下面是我找到的对比说明,更好地理解双边滤波,首先是高斯滤波的情况:
然后对比再看一下双边滤波的过程:
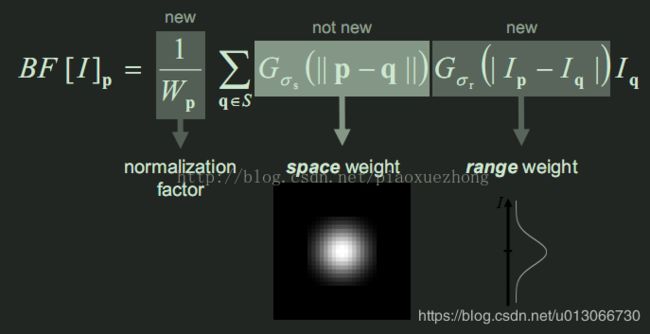
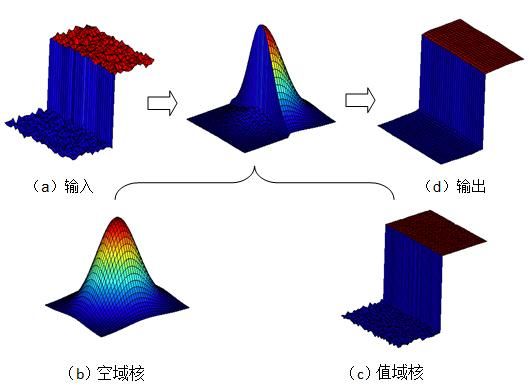
双边滤波的核函数是空间域核与像素范围域核的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
为了更加形象的说明两个权重的影响,作者还给出了二维图像的直观说明:

双边滤波算法实现
在原理部分,从双边滤波的公式就可以得到该算法的实现途径。由于直接的编码实现上述过程,其时间复杂度为O(σs2) ,比较耗时,所以后来出现了一些改进算法,比较经典的有:论文《Fast O(1) bilateral filtering using trigonometric range kernels》,提出了用Raised cosines函数来逼近高斯值域函数,并利用一些特性把值域函数分解为一些列函数的叠加,从而实现函数的加速[5,8]。
这里只对原始方法进行实现,从而有助于更加清楚的了解算法的原理。
matlab实现方法,这里也附一下核心代码:
functionoutput = bilateralFilter( data, edge, sigmaSpatial, sigmaRange, ...
samplingSpatial, samplingRange )
if~exist('edge', 'var' ),
edge = data;
end
inputHeight = size( data,1);
inputWidth = size( data,2);
if~exist('sigmaSpatial', 'var' ),
sigmaSpatial = min( inputWidth, inputHeight ) /16;
end
edgeMin = min( edge( : ) );
edgeMax = max( edge( : ) );
edgeDelta = edgeMax - edgeMin;
if~exist('sigmaRange', 'var' ),
sigmaRange =0.1* edgeDelta;
end
if~exist('samplingSpatial', 'var' ),
samplingSpatial = sigmaSpatial;
end
if~exist('samplingRange', 'var' ),
samplingRange = sigmaRange;
end
ifsize( data ) ~= size( edge ),
error('data and edge must be of the same size' );
end
% parameters
derivedSigmaSpatial = sigmaSpatial / samplingSpatial;
derivedSigmaRange = sigmaRange / samplingRange;
paddingXY = floor(2* derivedSigmaSpatial ) +1;
paddingZ = floor(2* derivedSigmaRange ) +1;
% allocate3D grid
downsampledWidth = floor( ( inputWidth -1) / samplingSpatial ) +1+2* paddingXY;
downsampledHeight = floor( ( inputHeight -1) / samplingSpatial ) +1+2* paddingXY;
downsampledDepth = floor( edgeDelta / samplingRange ) +1+2* paddingZ;
gridData = zeros( downsampledHeight, downsampledWidth, downsampledDepth );
gridWeights = zeros( downsampledHeight, downsampledWidth, downsampledDepth );
% compute downsampled indices
[ jj, ii ] = meshgrid(0: inputWidth -1,0: inputHeight -1);
di = round( ii / samplingSpatial ) + paddingXY +1;
dj = round( jj / samplingSpatial ) + paddingXY +1;
dz = round( ( edge - edgeMin ) / samplingRange ) + paddingZ +1;
% perform scatter (there's probably a faster way than this)
% normally woulddodownsampledWeights( di, dj, dk ) =1, but we haveto
% perform a summationtodobox downsampling
fork =1: numel( dz ),
dataZ = data( k ); % traverses the image column wise, sameasdi( k )
if~isnan( dataZ ),
dik = di( k );
djk = dj( k );
dzk = dz( k );
gridData( dik, djk, dzk ) = gridData( dik, djk, dzk ) + dataZ;
gridWeights( dik, djk, dzk ) = gridWeights( dik, djk, dzk ) +1;
end
end
% make gaussian kernel
kernelWidth =2* derivedSigmaSpatial +1;
kernelHeight = kernelWidth;
kernelDepth =2* derivedSigmaRange +1;
halfKernelWidth = floor( kernelWidth /2);
halfKernelHeight = floor( kernelHeight /2);
halfKernelDepth = floor( kernelDepth /2);
[gridX, gridY, gridZ] = meshgrid(0: kernelWidth -1,0: kernelHeight -1,0: kernelDepth -1);
gridX = gridX - halfKernelWidth;
gridY = gridY - halfKernelHeight;
gridZ = gridZ - halfKernelDepth;
gridRSquared = ( gridX .* gridX + gridY .* gridY ) / ( derivedSigmaSpatial * derivedSigmaSpatial ) + ( gridZ .* gridZ ) / ( derivedSigmaRange * derivedSigmaRange );
kernel = exp(-0.5* gridRSquared );
% convolve
blurredGridData = convn( gridData, kernel,'same' );
blurredGridWeights = convn( gridWeights, kernel,'same' );
% divide
blurredGridWeights( blurredGridWeights ==0) =-2; % avoid divideby0, won't read there anyway
normalizedBlurredGrid = blurredGridData ./ blurredGridWeights;
normalizedBlurredGrid( blurredGridWeights <-1) =0; % put0swhereit's undefined
blurredGridWeights( blurredGridWeights <-1) =0; % put zeros back
% upsample
[ jj, ii ] = meshgrid(0: inputWidth -1,0: inputHeight -1); % meshgrid does x,theny, so output arguments needtobe reversed
% no rounding
di = ( ii / samplingSpatial ) + paddingXY +1;
dj = ( jj / samplingSpatial ) + paddingXY +1;
dz = ( edge - edgeMin ) / samplingRange + paddingZ +1;
% interpn takes rows,thencols, etc
% i.e. size(v,1),thensize(v,2), ...
output = interpn( normalizedBlurredGrid, di, dj, dz );
双边滤波算法实例:
%% 测试函数,其中参数设置请参见函数注释
clc,clear all,close all;
ori=imread('D:\proMatlab\vessel_edge_extration\image\3.jpg');
ori=double(rgb2gray(ori))/255.0;
[width, height]=size(ori);
sigmaSpatial = min( width, height ) /30;
samplingSpatial=sigmaSpatial;
sigmaRange = ( max( ori( : ) ) - min( ori( : ) ) ) /30;
samplingRange= sigmaRange;
output = bilateralFilter( ori, ori, sigmaSpatial, sigmaRange, ...
samplingSpatial, samplingRange );
figure,
subplot(1,2,1),imshow(ori,[]);title('input image');
subplot(1,2,2),imshow(output,[]);title('output image');

论文参考:
https://jianshu.com/p/8d11e26c9665
https://blog.csdn.net/u013066730/article/details/87859184