/###################################################################
任务目标 :通过定时器产生任务切换,其中swi来实现多个任务之间切换
实验平台 : 本实验是基于S3C2440上实现
/####################################################################
工作原理 :
在运行任务程序的时候通过定时器产生中断,进入任务优先级调度,选择优先级最高的任务去执行;其中各个任务之间通过SWI软中断来实现相互切换。
难点:在中断模式和SVC模式下任务栈信息保存及恢复,同时在SVC模式下把将要运行的任务栈信息从该任务栈里恢复到寄存器中,最后跳转到用户态执行任务。
基本流程:
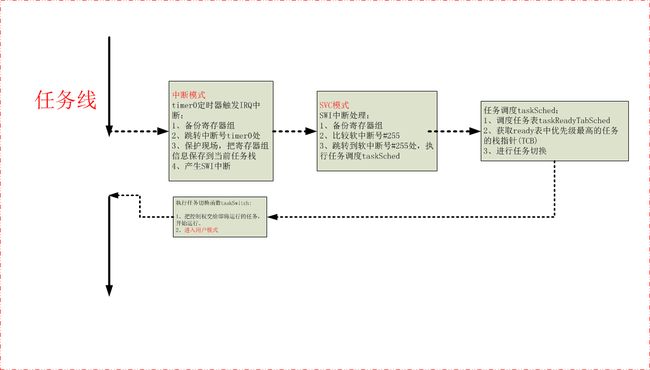
图片.png
实现步骤:
请参考微内核之任务切换。http://www.jianshu.com/p/7792cdc4fd5f
增加与修改部分bug:
主要增加定时器中断以及任务函数寄存器信息完整保存,使每次任务执行时被中断后能正确恢复该任务的信息,各个任务被中断还能从中断点继续执行。
1、IRQ模式下任务栈信息保存
*IRQ模式中断处理函数
/*#####################################################
* IRQ中断被监测到,则下面行为被执行:
* R14_irq = 将被执行的下一条指令地址+4;
* SPSR_irq = CPSR
* CPSR[4:0] = 0b10010 ; Enter Supervisor mode
* CPSR[5] = 0 ; Execute in ARM state
* CPSR[6] is unchanged
* CPSR[7] = 1 ;Disable normal interrupts
* CPSR[8] = 1 ; Disable Imprecise Data Aborts (v6 only)
* CPSR[9] = CP15_reg1_EEbit ; Endianness on exception entry
* 执行irq处理函数后返回原程序,可以使用如下指令:
* SUBS PC,R14,#4 ; SPSR_irq中的值自动存储到CPSR中
#######################################################*/
HandleIRQ:
SUB LR, LR, #4 /* 计算返回地址,中断模式LR保存被中断指令的下一条指令 */
STMDB SP!, { LR } /* 被中断模式下的指令下一条指令 */
STMDB SP!, { R0-R14}^ /* ^表示保存user模式下R0-R14,只针对usr模式 */
LDR R0,=IRQ_STACK /* 保存irq模式下的SP栈,用于切换到SVC模式下*/
STR SP, [R0] /* 恢复保存的寄存器值,用于调试 */
LDR R0, =LR_VAR /* 保存IRQ模式下的LR,用于调试 */
STR R14, [R0]
LDR R0, =pCurTcb /* 获取当前任务栈的起始地址 */
LDR R2, [R0]
MRS R0, SPSR
STR R0,[R2],#4 /* SPSR存进当前任务栈里 */
STR R0,[R2],#4 /* CPSR存进当前任务栈里 */
MOV R1, SP
MOV R3,#16 /* 把IRQ模式下保存寄存器数量R0-R14 */
/* 把IRQ模式下保存寄存器数量R0-R15复制到当前任务栈里 */
IRQ_STACK_COPY:
LDR R0,[R1],#4
STR R0,[R2],#4
SUBS R3,R3,#1
BNE IRQ_STACK_COPY
LDR LR, =int_return /* 设置调用ISR即EINT_Handle函数后的返回地址
LDR PC, =ISR_Handle /* 调用中断服务函数,在interrupt.c中 */
int_return:
LDMIA SP!, { R0-R14 }^ /* ^表示把中断模式下SP栈里寄存器恢复到usr模式下对应的寄存器中 */
LDMIA SP!, { PC }^ /* 中断返回, ^表示将spsr的值复制到cpsr */
2、SVC模式下任务栈信息保存
*SVC模式中断处理函数
/******************************************************************************
* SWI中断进入到SVC(超级用户模式),当SWI被执行时,下面行为被执行:
* R14_svc = SWI指令的下一条指令;
* SPSR_svc = CPSR
* CPSR[4:0] = 0b10011 ; Enter Supervisor mode
* CPSR[5] = 0 ; Execute in ARM state
* CPSR[6] is unchanged
* CPSR[7] = 1 ;Disable normal interrupts
* CPSR[8] is unchanged
* CPSR[9] = CP15_reg1_EEbit ; Endianness on exception entry
* 执行SWI函数后返回原程序,可以使用如下指令:
* MOVS PC,R14 ; SPSR_svc中的值自动存储到CPSR中
******************************************************************************/
HandleSWI:
STMDB sp!, {R14} /* svc模式下R14(LR)保存user模式下的下一条指令地址PC; */
LDR R0, =LR_VAR /* 保存SVC模式下的LR,用于调试 */
STR R14, [R0]
STMDB sp!, { r0-r14}^ /* ^表示user模式下的R0-R14到SVC模式的SP中,只针对user模式 */
MRS R0, SPSR /* 不同模式之间切换,cpsr被保存在SPSR中 */
STMDB sp!, {R0} /* CPSR位置 */
STMDB sp!, {R0} /* SPSR位置 */
LDR R0, =SVC_STACK /* 保存SVC模式下的SP栈,用于恢复和调试 */
STR sp, [R0]
/******************************************************************************
* 下面代码用于监测irq中断触发的SWI中断,以便跳转到taskSched函数执行最高优先级任务
******************************************************************************/
sub R0, R14, #4 /* lr -4 为指令SWI XXX的地址,低24位是软件中断号 */
nop
ldr R1,[R0,#0] /* lr -4 为指令SWI XXX的地址,低24位是软件中断号 */
nop
bic R1,R1,#0XFF000000 /* 取得arm指令的低24位立即数 */
cmp R1,#255 /* 判断24位立即数,如果是255,调用timer0_taskSched函数 */
beq timer0_taskSched
/******************************************************************************
* 把寄存器值保存到当前任务栈里,把SVC模式下保存的当前任务栈信息保存到当前任务栈
* tasknTcb中。以备下次调用时在恢复该任务的栈信息,是否可以直接存在栈里呢?
******************************************************************************/
LDR R0, =pCurTcb /* 获取当前任务栈的起始地址 */
LDR R1, [R0]
CMP R1,#0 /* 把pCurTcb值==0;说明是taskStart函数;跳转到taskBefore处执行 */
BEQ taskBefore
LDR R0,=SVC_STACK /* 恢复异常时保存SVC模式下的SP栈指针到R2 */
LDR R2,[R0]
MOV R3,#18 /* 把SVC模式下栈信息保存到当前任务栈地址,保存SPSR/CPSR/R0-R14寄存器 */
STACK_COPY:
LDR R0,[R2],#4
STR R0,[R1],#4
SUBS R3,R3,#1
BNE STACK_COPY
taskBefore:
sub lr, lr, #4 /* lr -4 为指令SWI XXX的地址,低24位是软件中断号 */
ldr R3,[lr,#0] /* lr -4 为指令SWI XXX的地址,低24位是软件中断号 */
bic R3,R3,#0XFF000000 /* 取得arm指令的低24位立即数 */
cmp R3,#0 /* 判断24位立即数,如果是0,调用usrModeSpSetup函数 */
beq usrModeSpSetup
cmp R3,#1 /* 判断24位立即数,如果是1,调用task1Tcb函数 */
ldr R0,=task1Tcb
ldr R0,[R0]
beq taskTcbSwitch
cmp R3,#2 /* 判断24位立即数,如果是2,调用task2Tcb函数 */
ldr R0,=task2Tcb
ldr R0,[R0]
beq taskTcbSwitch
cmp R3,#3 /* 判断24位立即数,如果是3,调用task3Tcb函数 */
ldr R0,=task3Tcb
ldr R0,[R0]
beq taskTcbSwitch
bne END
taskTcbSwitch:
ldr pc, =taskSwitch
/******************************************************************************
* 建立用户模式栈空间
******************************************************************************/
usrModeSpSetup:
mrs R0, CPSR /* Read the CPSR */
bic R0, R0, #0xdF /* Clear the mode irq fiq bits */
orr R0, R0, #0x10 /* Set the mode bits to FIQ mode */
msr cpsr_c, R0 /* 进入用户态,并设置用户态的SP,使能中断 */
ldr sp, =0x33e00000 /* 设置用户栈指针起始值 */
ldr R0, =USER_STACK /* 保存IRQ模式下的LR,用于调试 */
str sp, [R0]
ldr pc, =rootTask /* rootTask开始用户模式 */
timer0_taskSched:
ldr pc, =taskSched /* 在SVC模式下进入taskSched函数调度函数 */
END:
movne R0, #-1 /* 没有该软中断对应函数,出错返回-1 */
3、任务切换函数taskswitch修改
/***********************************************************************************
函数功能: 实现任务切换,调用新得任务执行,并把控制权交给新任务.
入口参数: pTcb: 即将运行的任务的TCB指针.
返 回 值: none.
***********************************************************************************/
int taskSwitch(TCB * pTcb)
{
/******************************************************************************
* 即将运行任务的寄存器组地址, 汇编语言通过这个变量恢复寄存器
******************************************************************************/
nextTaskSp = &pTcb->strStackReg;
/* 即将运行任务的TCB指针 */
pCurTcb = pTcb;
__asm__(
/******************************************************************************
* 获取将要运行任务的栈信息并运行新任务
******************************************************************************/
" LDR R0, =nextTaskSp \n\t"
" LDR R1, [R0] \n\t"
" LDMIA R1!, {R0} \n\t" /* Spsr位置 */
" MSR SPSR, R0 \n\t"
" LDMIA R1!, {R0} \n\t" /* cpsr位置 */
" MOV R13, R1 \n\t" /* 开始恢复原用户态任务栈信息 */
" LDMIA R13!, {R0-R12}^ \n\t" /* ^表示把任务栈里R0-R14恢复到user模式下的R0-R14中,只针对用户模式哦 */
" ADD R13,R13,#0x4 \n\t" /* 跳过恢复用户态的R13 */
" LDMIA R13!, {R14}^ \n\t" /* ^表示把任务栈里R0-R14恢复到user模式下的R0-R14中,只针对用户模式哦 */
" nop \n\t"
" LDMIA R13!, {R14} \n\t" /* ^表示把任务栈里R15恢复到SVC模式下的R14中,只针对用户模式哦 */
" nop \n\t"
" LDR R13, =SVC_STACK \n\t" /* 保存SVC模式下的SP栈,用于恢复和调试 */
" LDR R13, [R13] \n\t"
" ADD R13,R13,#0x48 \n\t" /* 恢复SVC模式下的SP栈;这里可以释放掉SVC模式SP栈,因为要跳到用户模式 */
" MOVS R15, R14 \n\t" /* 进入用户模式, SVC模式下的SPSR值恢复到USR模式下的CPSR中 */
);
return 0;
}