参考:https://www.futurelearn.com/courses/statistical-shape-modelling/2/steps/120487 (个人建议:直接看原文,讲的很详细。有一个缺点:全英文的,很多东西需要重新理解)
参考二:https://www.cnblogs.com/nsnow/p/4745730.html?spm=a1zcr.8293797.0.0.384d6385N78jwi (大家也可以参考这篇博客,但我没有细看)
下面是个人理解:
1、预备知识:
1)计算机图形学中,有一种变换称为:“仿射变换”,这种变换应用非常广泛。
2)“仿射变换” 中的基本变换有这样四种: 平移(translation);旋转(rotation);缩放(scale);剪切. Tips: 记住英文很重要。
从图像角度看:其中,三种变换即(如图):

其中,对于Rotation,我们需要知道旋转矩阵的知识:(如图)
(大家可以看博客链接,也可以直接看总结,个人认为知道下面写的应该就差不多了)详细博客链接:https://blog.csdn.net/csxiaoshui/article/details/65446125


2、对“普氏变换(普氏对齐)”的简要总结:
如果今天我们被给定了一个shape,(我理解为形状),比如手的图片。那么,我们想基于这个形状(图片)去重建手的模型,是非常方便的,我们可以直接计算。(这里方法不限,比如通过神经网络进行回归)。但,这个形状,比如这张图片,你要重建手的模型,那么,你肯定只会去考虑,这个手在旋转(rotation)和平移(translation)之前的实际形状,比如一只手有五个手指。你不会去考虑这张图片上的手,他经过了平移或者旋转,才得到你看到的这个角度。因此,(我的理解)这里称变形场也有shape的平移和旋转的分量。
那么,我们想要做优化,肯定是要考虑到这个问题的(也可以不考虑)。那就需要进行“普氏对齐”,完成如下的一种图片转换。

( 到上面的话,我觉得知道意思就 够了。下面是一点点偏数学的表达,懒得打公式了,直接截图。(2D、3D方法类似),其他的还有广义普氏变换,需要了解的同学,可以去,本博客第一行 参考网址详细理解。)
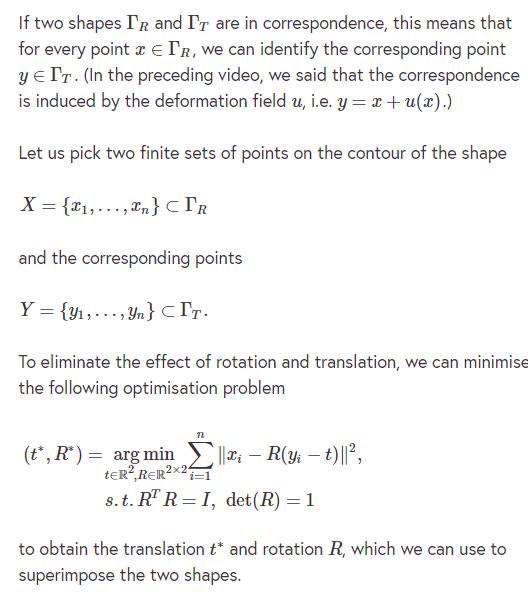
下面大体的意思是:有两个点集,分别为X,Y。 同时,X中每个点都能通过仿射变换得到Y。那么,为了消除/或得到 其中具体的仿射变换,可以通过最小化 Y经过我们假设的逆仿射变换得到的 预测X’,与实际X之间的差值来进行优化。(个人理解。希望得到指正!!!)