代数几何:点,线,抛物线,圆,球,弧度和角度
一, 笛卡尔坐标系
笛卡尔坐标系是数学中的坐标系,而计算机中则采用屏幕坐标系统.
而三维坐标系则没有一个工业标准,分别有 Y轴向上(y-up)的坐标系, Z轴向上(z-up)的坐标系, 右手坐标系(right-handed coordinate system), 左手坐标系(left-handed coordinate system).
下面的是y-up left-handed coordinate system
数学中通常以括号加住的方式,如P(x,y,z)来表示点, 而程序中通常使用p<x,y,z>或p[x,y,z]表示点.代码片段:
function Point2D(x, y){ this.x = x this.y = y } function Point3D(x, y, z){ this.x = x this.y = y this.z = z }
二, 线
1. 求两点之间的距离
勾股定理: a2 + b2 = c2
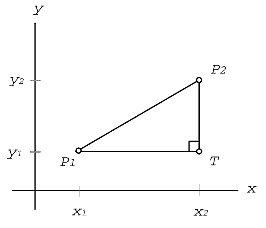
2D场景中, 假设要获取P1(x1, y1)与P2(x2, y2)之间的距离d, 计算公式:

/* *@param {Point2D} p1 *@param {Point2D} p2 *@return {number} */ function distance2D(p1, p2){ var dX = p1.x - p2.x , dY = p1.y - p2.y return Math.sqrt(Math.pow(dX, 2) + Math.pow(dY, 2)) }
3D场景中,假设要获取P1(x1, y1, z1)与P2(x2, y2, z2)之间的距离d, 计算公式:

/* *@param {Point3D} p1 *@param {Point3D} p2 *@return {number} */ function distance3D(p1, p2){ var dX = p1.x - p2.x , dY = p1.y - p2.y , dZ = p1.z - p2.z return Math.sqrt(Math.pow(dX, 2) + Math.pow(dY, 2) + Math.pow(dZ, 2)) }
2. 斜率
数学公式: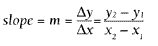 , slope为正数则直线横穿第一和第三像限, 为负数则直线横穿第二和第四像限.
, slope为正数则直线横穿第一和第三像限, 为负数则直线横穿第二和第四像限.
直线公式: y = slope * x + b , b为直线与Y轴交点离原点的偏移量.
假设直线A为y1 = slope1 * x1 + b1, 而直线B为y2 = slope2 * x2 + b2
if (slope1 === slope2){ console.log("A与B平行") if (b1 === b2) console.log("A与B重合") } else{ console.log("A与B相交") if (-1 === slope1 * slope2) console.log("A与B相互垂直") }
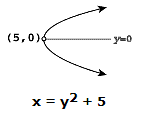
三, 抛物线
抛物线分为4个方向
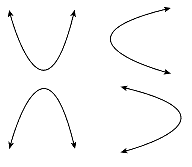
假设抛物线定点P(x1,y1)
Y轴对称的抛物线: y = a(x - x1)2 + y1 , a为正数则开口向上, a为负数则开口向下.
X轴对称的抛物线: x = a(y - y1)2 + x1, a为正数则开口向右, a为负数则开口向左.
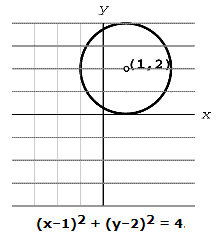
四, 圆
假设圆心坐标P(x1, y1), 半径为r.
公式: (x - x1)2 + (y - y1)2 = r2
/* * @constructor * @param {Point2D} point 圆心坐标 * @param {number} r 半径 */ function Circle(point, r){ this.point = point this.r = r }
碰撞算法基础: 两圆相切或相交
公式: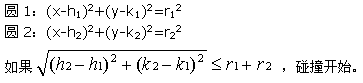
/* *@param {Circle} c1 *@param {Circle} c2 *@return {boolean} */ function isHit(c1, c2){ var dCenter = Math.sqrt(Math.pow(c1.center.x - c2.center.x, 2) + Math.pow(c1.center.y - c2.center.y, 2)) var totalRadius = c1.r + c2.r return dCenter <= totalRadius }
五, 球(3D)
假设球心坐标P(x1,y1,z1), 半径为r
公式: (x - x1)2 + (y - y1)2 + (z - z1)2 = r2
/* *@param {Point3D} center *@param {number} r */ function Sphere(center, r){ this.center = center this.radius = r }
碰撞算法基础: 两球相切或相交

/* *@param {Sphere} c1 *@param {Sphere} c2 *@return {boolean} */ function isHit(c1, c2){ var dCenter = Math.sqrt(Math.pow(c1.center.x - c2.center.x, 2) + Math.pow(c1.center.y - c2.center.y, 2) + Math.pow(c1.center.z - c2.center.z, 2)) var totalRadius = c1.r + c2.r return dCenter <= totalRadius }
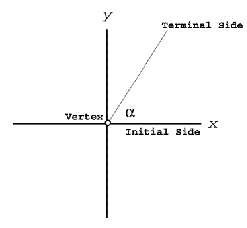
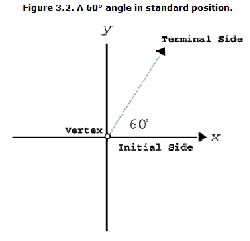
六, 弧度和角度
以笛卡尔坐标系的P(0,0)作为角点. 初始边为X轴的正半轴, 终边与初始边构成一个夹角.
初始边逆时针旋转得到的夹角度数为正值, 顺时针旋转得到的夹角度数为负值.
π≈3.141592654
角度:degree=radian*180/π
弧度:radian=degree*π/180
function getDegree(radian){ return radian * 180 / Math.PI } function getRadian(degree){ return degree * Math.PI / 180 }
参考: http://www.cnblogs.com/HelloCG/