Sharp_GP2Y0A 红外测距传感器 Arduino读取
Sharp_GP2Y0A
GP2Y0A02YK0F, GP2Y0A710K0F Arduino 程序
GP2Y0A02YK0F

传感器参数:
- 20~150cm Analog output type.
- 4.5 to 5.5V, 33mA
- Block diagram

- Timing Chart
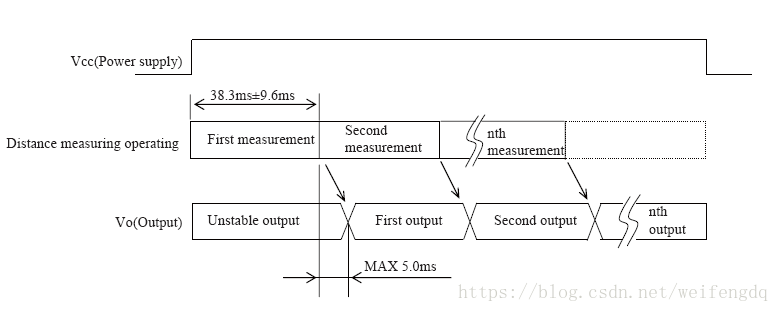
- Output
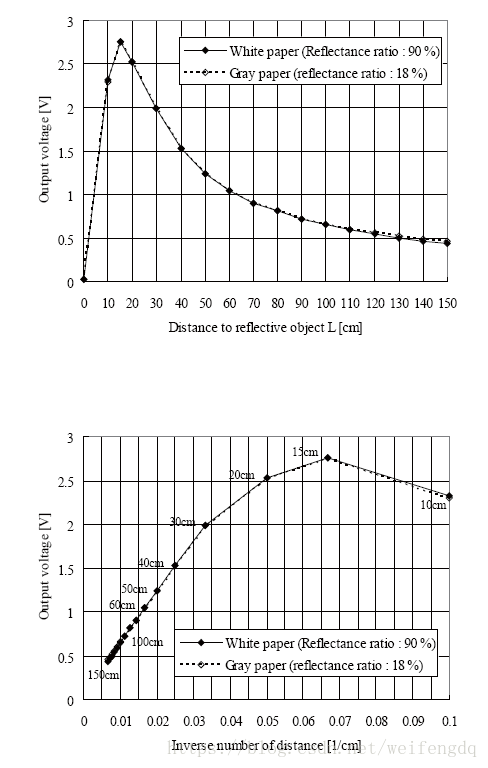
参考V-cm图, 用查表法, 连接Vout到Arduino的A0引脚, 测量频率20Hz.
//SHARP GP2Y0A02
//Yellow Vout
//Black GND
//Red 5V
float distance[] = {20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140, 150};
float voltage[14] = {2.5, 2, 1.55, 1.25, 1.1, 0.85, 0.8, 0.73, 0.7, 0.65, 0.6, 0.5, 0.45, 0.4};
typedef struct {
float maxDistance; //cm
float minDistance; //cm
float offset; //cm
float distance; //cm,
int frequency; //Hz
int pin;
}SHARP;
SHARP Sharp = {150, 20, 0, 0, 20, A0};
void getDistance(SHARP* Sharp) {
float v = analogRead(Sharp->pin);
v = v / 1024.0 * 5;
int index = 0;
for(index = 0; index < 14; index++) {
if(v >= voltage[index]) {
break;
}
}
if(index == 0) {
Sharp->distance = 20;
} else if(index == 14) {
Sharp->distance = 150;
} else {
Sharp->distance = map(v, voltage[index], voltage[index-1], distance[index], distance[index-1]);
}
}
void setup() {
Serial.begin(115200);
}
void loop() {
static unsigned long lastTime = millis();
if(millis() - lastTime > 1000/Sharp.frequency) {
lastTime = millis();
getDistance(&Sharp);
Serial.println(Sharp.distance);
// int v = analogRead(Sharp.pin);
// Serial.println(v);
}
}GP2Y0A710K0F

传感器参数:
- 100~550cm Analog output type
- 4.5~5.5V, 30mA
- Block diagram

- timing chart
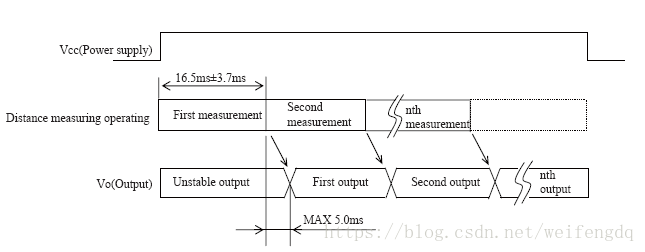
- Output

一开始用的公式法, 参考的是V-1/cm图, 结果测出来数据有点糟糕, 跳来跳去. 后来用查表法. 连接Vout到Arduino的A0引脚, 测量频率40Hz.
Github
代码参考我的Github: Sharp_GP2Y0A