百度Apollo无人车车道线检测挑战赛(二)
百度Apollo车道线分割比赛二(模型搭建)
百度Apollo车道线分割比赛一(数据处理)
百度Apollo车道线分割比赛三(模型训练)
本实现暂时实现两种常见的分割模型Unet,deeplabv3plus,最后在实现两个模型的融合(百度比赛主要看分割的miou不侧重模型的实时性),其中Unet的backbone采用resnet101,deeplabv3plus采用的backbone为Xcepthon65。backbone可以灵活选择,而且pytorch中有预训练好的权重,可以加载实现快速的训练。
一.Unet
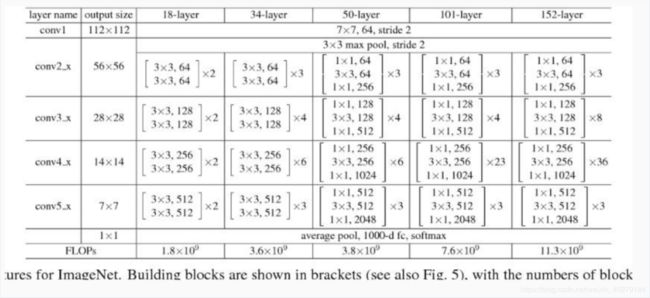
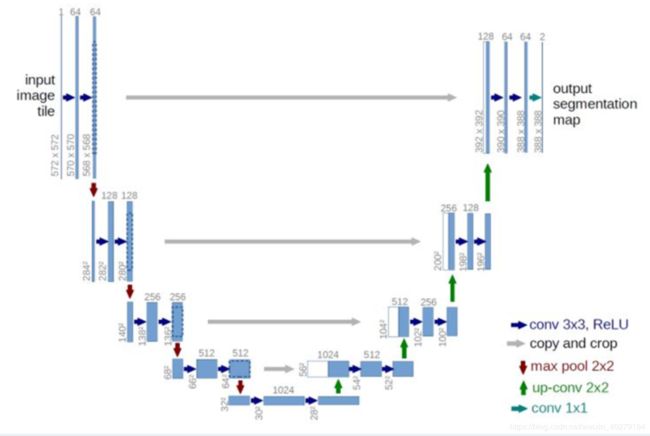
Resnet系列参数如下图,在Unet模型分为 encoder block 和decoder block ,resnet去掉最后的全连接层作为Unet的backbone。另外decoder block上采样采用转置卷积,上采样止原图的1/4大小,最后计算loss时需要将最后输出双线性插值到原图大小再和label做loss。
resnet系列:
Unet结构:
处理文件为models.Unet_ResNet101.py,代码如下:
#coding:utf-8
#@author: Jiangnan He
#@date:2019.12.10 18:21
'''
resnet101-unet
1.上采样 还是采用 转置卷积
2.进行高低层特征融合时使用了torch.cat() 替换了 FCN 中的 "+"
3.resnet101 下采样1/32 所以进行了 5次下采样 本实现进行了 3次高低层特征融合 最后得到heatmap为原图的1/4
4.与label做loss 时直接将输出 heatmap 上采样到image尺寸
layer0 input
↓
layer1 conv3x3 ch=64 (1/2)
↓
layer2 reslayer(maxpool) ch=256 (1/4) --------------------------- 256+256---conv3 ch=256
↓ ↑upconv2
layer3 reslayer ch=512 (1/8) ------------------------------ 512+512---conv3 ch=512
↓ ↑upconv2
layer4 reslayer ch=1024 (1/16)---------------------------------- 1024+1024--conv3 ch=1024
↓ ↑upconv2
layer5 reslaeyr ch=2048 (1/32)-----------------------------------------
'''
import torch
import torch.nn as nn
from torch.autograd import Variable
from torchsummary import summary
from torch.nn import functional as F
class Block(nn.Module):
def __init__(self,in_ch,out_ch,ksize=3,stride=1,padding=1):
super(Block,self).__init__()
self.conv1=nn.Conv2d(in_ch,out_ch,kernel_size=ksize,stride=stride,padding=padding)
self.bn=nn.BatchNorm2d(out_ch)
self.relu=nn.ReLU(inplace=True)
def forward(self, x):
return self.relu(self.bn(self.conv1(x)))
def make_layers(in_channels, layer_list):
layers = []
for v in layer_list:
layers += [Block(in_channels, v)]
in_channels = v
return nn.Sequential(*layers)
#层
class Layer(nn.Module):
def __init__(self, in_channels, layer_list):
super(Layer, self).__init__()
self.layer = make_layers(in_channels, layer_list)
def forward(self, x):
out = self.layer(x)
return out
#残差块
class ResBlock(nn.Module):
def __init__(self,ch_list,downsample,Res):# ch_list=[in_ch,ch,out_ch]
super(ResBlock,self).__init__()
self.res=Res# 残差块 还是 瓶颈块的标志位
self.ds = downsample # 残差块时 是否下采样
#第一个1x1 卷积
self.firconv1x1=Block(ch_list[0],ch_list[1],1,1,0) #第一个1x1卷积 不下采样
self.firconv1x1d = Block(ch_list[0],ch_list[1], 1,2,0) #第一个1x1卷积 下采样
# 3x3卷积
self.conv3x3=Block(ch_list[1],ch_list[1],3,1,1)
#第二个1x1卷积
self.secconv1x1=Block(ch_list[1],ch_list[2],1,1,0)
#skip 卷积操作
self.resconv1x1d=Block(ch_list[0],ch_list[2],1,2,0) #skip下采样的1x1卷积
self.resconv1x1=Block(ch_list[0],ch_list[2],1,1,0) #skip下采样的1x1卷积
def forward(self,x):
if self.res==True:#此时为残差块
if self.ds==True:#skip有卷积操作需要下采样
residual=self.resconv1x1d(x)
f1=self.firconv1x1d(x)
else:#skip有卷积操作不需要下采样
residual = self.resconv1x1(x)
f1 = self.firconv1x1(x)
else:# 瓶颈块sikp无卷积操作
residual=x
f1 = self.firconv1x1(x)
f2=self.conv3x3(f1)
f3=self.secconv1x1(f2)
f3+=residual
return f3
#Res层
class ResLayer(nn.Module):
def __init__(self,ch_list1,ch_list2,downsample,numBotBlock):
super(ResLayer,self).__init__()
self.num = numBotBlock
self.resb=ResBlock(ch_list1,downsample,True)
self.botb=ResBlock(ch_list2,downsample,False)
self.BoB=self.make_layers()
def make_layers(self):
layers=[]
for i in range(self.num):
layers+=[self.botb]
return nn.Sequential(*layers)
def forward(self,x):
res=self.resb(x)
return self.BoB(res)
#resnet101
class ResNet101(nn.Module):
def __init__(self):
super(ResNet101,self).__init__()
self.conv0=nn.Conv2d(3,64,kernel_size=3,stride=1,padding=1)
self.conv1=nn.Conv2d(64,64,kernel_size=3,stride=2,padding=1) #1/2
self.pool=nn.MaxPool2d(kernel_size=2,stride=2) #1/4
self.layer1=ResLayer([64,64,256],[256,64,256],False,4)
self.layer2=ResLayer([256,128,512],[512,128,512],True,3) #1/8 ch= 512
self.layer3=ResLayer([512,256,1024],[1024,256,1024],True,23) #1/16 ch= 1024
self.layer4=ResLayer([1024,512,2048],[2048,512,2048],True,6) #1/32 ch=2048
#权重初始化 conv 以及BN
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')#mode="fan_in" weight方差在前向传播中保持不变 mode="fan_out" weight后向传播方差不变
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
layer0=self.conv0(x) #1
layer1=self.conv1(layer0) #1/2
layer2 =self.layer1(self.pool(layer1) ) #1/4
layer3=self.layer2(layer2) #1/8
layer4 = self.layer3(layer3) #1/16
layer5 = self.layer4(layer4) #1/32
#print(layer0.size(),layer1.size(),layer2.size(),layer3.size(),layer4.size(),layer5.size())
return [layer2,layer3,layer4,layer5]
#上采样模块
class Upsample(nn.Module):
def __init__(self,in_ch1,in_ch2,upsampleratio=2):# layer42048 layer3 1024
super(Upsample,self).__init__()
self.conv1=Block(in_ch1,in_ch2)# layer4 2048-->1024
self.conv2=Block(in_ch2,in_ch2)#layer3 1024-->1024
self.conv3=Block(in_ch2*2,in_ch2) # cat layer3 2048--> 1024
self.trans_conv=nn.ConvTranspose2d(in_ch2,in_ch2,upsampleratio,stride=upsampleratio)
def forward(self,featrue1,featrue2):#layer4 ,layer3
#
return self.conv3( torch.cat([ self.trans_conv(self.conv1(featrue1)), self.conv2(featrue2) ],dim=1) )
class UnetDecode(nn.Module):
def __init__(self,n,in_ch,out_ch,upsratio,trans_conv=False): # in_ch VGG 后通道数 out_ch 为上采样之后的通道数
super(UnetDecode,self).__init__()
self.conv1=Layer(in_ch,[out_ch]*n) #这里加n层Block
self.trans_conv=nn.ConvTranspose2d(out_ch,out_ch,upsratio,stride=upsratio)# upsratio 上采样倍数
def forward(self,x):
return self.trans_conv(self.conv1(x))
class Unet_resnet101(nn.Module):
def __init__(self,n,in_ch,out_ch,upsratio):
super(Unet_resnet101,self).__init__()
self.encode=ResNet101()
self.catup1=Upsample(2048,1024)
self.catup2=Upsample(1024,512)
self.catup3=Upsample(512,256)
self.decode=UnetDecode(n,in_ch,out_ch,upsratio)
self.classfier=nn.Conv2d(256,10,3,padding=1)
def forward(self,x):
size=x.shape[-2:]
features=self.encode(x)
[layer2,layer3,layer4,layer5]=features#
#layer1 256*16 layer2 :512*8*8 layer3 : 1024*4*4 layer4 : 2048*2*2
layer4=self.catup1(layer5,layer4)
layer3=self.catup2(layer4,layer3)
layer2=self.catup3(layer3,layer2)
#return self.classfier(layer2)
return F.interpolate(self.classfier(layer2), size=size, mode='bilinear', align_corners=False)
if __name__=="__main__":
if torch.cuda.is_available():
model=Unet_resnet101(4,2048,64,4).cuda()
x = Variable(torch.randn(1, 3, 64, 64)).cuda()
else:
model=Unet_resnet101(4,2048,64,4)
x = Variable(torch.randn(1, 3, 64, 64))
model.eval()
y=model(x)
print("y.size",y.size())
summary(model,(3,64,64))
二. Deeplabv3plus
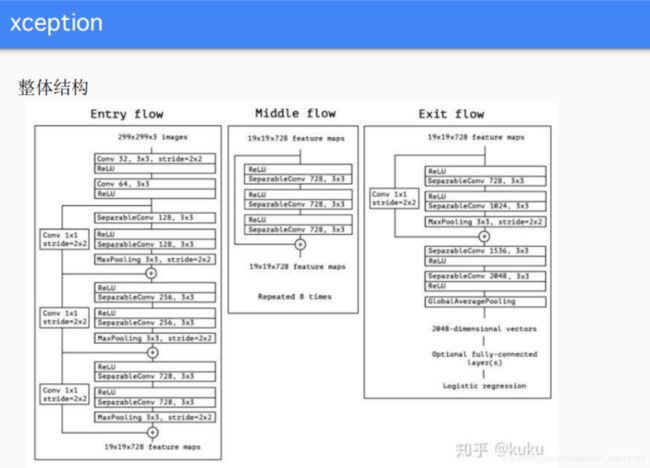
Xception系列Xception41 ,Xception65 ,Xception71 其中Xception41结构如图,本文采用的是Xception65作为backbone。
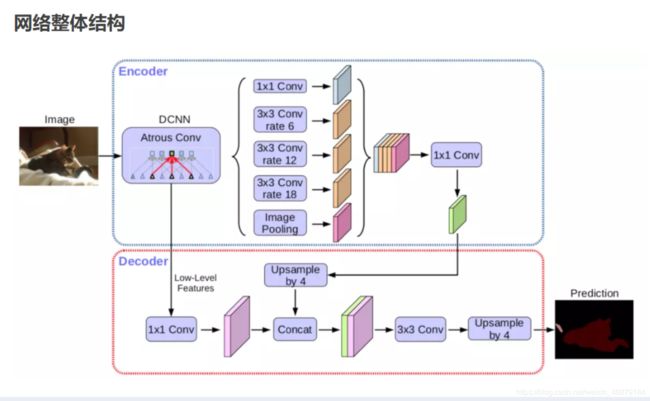
Deeplabv3plus结构如下,与Unet不同卷积采用深度可分离卷积,上采样方式为双线性插值:
处理文件为models.deeplabv3p_Xception65.py,代码如下:
#coding:utf-8
#@author: Jiangnan He
#@date:2019.12.17 15:03
''
'''
本实现为deeplabv3+,backbone为Xception_65
'''
import torch.nn as nn
import torch
from torchsummary import summary
from torch.nn import functional as F
#实现深度分离卷积 将卷积分程in_ch 组进行卷积 接着用1x1 卷积进行融合
class depthwiseconv(nn.Module):
def __init__(self, in_ch, out_ch,ksize=3,stride=1,padding=1):
super(depthwiseconv, self).__init__()
self.depth_conv = nn.Conv2d(
in_channels=in_ch,
out_channels=in_ch,
kernel_size=ksize,
stride=stride,
padding=padding,
groups=in_ch
)
self.point_conv = nn.Conv2d(
in_channels=in_ch,
out_channels=out_ch,
kernel_size=1,
stride=1,
padding=0,
groups=1
)
def forward(self, x):
return self.point_conv(self.depth_conv(x))
#块
class Block(nn.Module):
def __init__(self,in_ch,out_ch,ksize=3,stride=1,padding=1,sep=True):
super(Block,self).__init__()
#是否为深度可分离卷积模块标志位
self.issepconv = sep
self.conv=nn.Conv2d(in_ch,out_ch,kernel_size=ksize,stride=stride,padding=padding,bias=False)
self.sepconv = depthwiseconv(in_ch, out_ch, ksize, stride, padding)
self.Bn=nn.BatchNorm2d(out_ch)
self.relu=nn.ReLU(inplace=True)
def forward(self,x):
if self.issepconv==True:
return self.relu(self.Bn(self.sepconv(x)))
else:
return self.relu(self.Bn(self.conv(x)))
#层
class Layer(nn.Module):
def __init__(self,in_ch,out_ch,ksize,stride,padding=1,upsample=True):# 64 128 3 1 1
super(Layer,self).__init__()
self.upsample=upsample#是否进行下采样
self.block1=Block(in_ch,out_ch,ksize,stride,padding)
self.block2 = Block(out_ch, out_ch, ksize, stride, padding)
self.block3 = Block(out_ch, out_ch, ksize, stride, padding)#不进行下采样时ksize=3 padding=1 same
#下采样时
self.block4=Block(out_ch, out_ch, ksize, stride=2, padding=1)#进行下采样时
self.skipconv=nn.Conv2d(in_ch,out_ch,kernel_size=1,stride=2,padding=0)#padding设置注意
self.skipconv1=nn.Conv2d(in_ch,out_ch,kernel_size=1,stride=1,padding=0)#padding设置注意
if self.upsample==True:#进行下采样时
layer = [self.block1, self.block2, self.block4]
else:#不进行下采样时的组合
layer=[self.block1,self.block2,self.block3]
self.layer = self.layer=nn.Sequential(*layer)
def forward(self,x):
if self.upsample==True:
out=self.layer(x)
skipout=self.skipconv(x)
return torch.cat([out,skipout],dim=1)
else:
out=self.layer(x)
skipout=self.skipconv1(x)
return torch.cat([out,skipout],dim=1)
#模型 Xception 作为backbone
class DCNN(nn.Module):
def __init__(self):
super(DCNN,self).__init__()
self.conv1=Block(3,32,3,2,1,False)#conv 1/2
self.conv2=Block(32,64,3,1,1,False)#conv
self.layer1=Layer(64,128,3,1,1,True)#128 1/4
self.layer2=Layer(256,256,3,1,1,True) #512 /8
self.layer3 =Layer( 512,728, 3, 1, 1, True)# 1456 /16
self.BlockLayer=Layer(1456,728,3,1,1,False)#repeat 16times
self.layer4 = self.make_layer(16)
self.layer5=Layer(1456,1024,3,1,1,True) #1/32
self.conv3=Block(2048,1536,3,1,1,True)#sepconv
self.conv4 = Block(1536, 1536, 3, 1, 1, True) # sepconv
self.conv5=Block(1536, 2048, 3, 1, 1, True) # sepconv
def make_layer(self,numlayer):
layer=[]
for i in range(numlayer):
layer+=[self.BlockLayer]
return nn.Sequential(*layer)
def forward(self, x):
#entry flow
conv1=self.conv1(x)
conv2=self.conv2(conv1)
layer1=self.layer1(conv2)#
layer2=self.layer2(layer1)
layer3 = self.layer3(layer2)
#middlle flow
layer4 = self.layer4(layer3)
#exit flow
layer5 = self.layer5(layer4)
conv3=self.conv3(layer5)
conv4=self.conv4(conv3)#
conv5=self.conv5(conv4)
# print("DCNN ",conv1.size(), conv2.size(),layer1.size(),layer2.size(),layer3.size() ,layer4.size(), layer5.size(), conv3.size(),conv4.size(),conv5.size())
return layer2,conv5
class ASPPConv(nn.Sequential):
def __init__(self, in_channels, out_channels, dilation):
modules = [
nn.Conv2d(in_channels, out_channels, 3, padding=dilation, dilation=dilation, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU()
]
super(ASPPConv, self).__init__(*modules)
class ASPPPooling(nn.Sequential):
def __init__(self, in_channels, out_channels):
super(ASPPPooling, self).__init__(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(in_channels, out_channels, 1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU())
def forward(self, x):
size = x.shape[-2:]
for mod in self:
x = mod(x)
return F.interpolate(x, size=size, mode='bilinear', align_corners=False)
class ASPP(nn.Module):
def __init__(self, in_channels):
super(ASPP, self).__init__()
out_channels = 256
modules = []
modules.append(nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU()))
rate1, rate2, rate3 = (6,12,18)
modules.append(ASPPConv(in_channels, out_channels, rate1))
modules.append(ASPPConv(in_channels, out_channels, rate2))
modules.append(ASPPConv(in_channels, out_channels, rate3))
modules.append(ASPPPooling(in_channels, out_channels))
self.convs = nn.ModuleList(modules)
self.project = nn.Sequential(
nn.Conv2d(5 * out_channels, out_channels, 1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
nn.Dropout(0.5))
def forward(self, x):
res = []
for conv in self.convs:
res.append(conv(x))
res = torch.cat(res, dim=1)
return self.project(res)
class deeplabv3p(nn.Module):
def __init__(self):
super(deeplabv3p,self).__init__()
self.DCNN=DCNN()
self.ASPP=ASPP(2048)
self.conv1=Block(512,256,ksize=1,padding=0,sep=False)
self.conv2=Block(2*256,8,ksize=3,padding=1,sep=False)# 原本为 3x3 这里测试模型 输入很小 所以改为1x1
self.conv3 = Block(256, 256, ksize=1, padding=0, sep=False)
#初始化参数
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')#mode="fan_in" weight方差在前向传播中保持不变 mode="fan_out" weight后向传播方差不变
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self,x):
lowfeature,out=self.DCNN(x)
lowfeature=self.conv1(lowfeature)#
#print(lowfeature.size(),'lowfeaturesize1')
f1=self.conv3(self.ASPP(out))
#print(f1.size(),'f1')
hightfeature=F.interpolate(f1,scale_factor=4, mode='bilinear', align_corners=False)
#print(hightfeature.size(),"hightfeatsize")
out1=torch.cat([lowfeature,hightfeature],dim=1)
return F.interpolate(self.conv2(out1),scale_factor=8, mode='bilinear', align_corners=False)
if __name__=="__main__":
if torch.cuda.is_available():
x=torch.randn(1,3,128, 384).cuda()
model=deeplabv3p().cuda()
else:
x=torch.randn(1,3,128, 384)
model=deeplabv3p()
model.eval()
y=model(x)
print(y.size(),"y.size")
'''
summary(model, (3, 128, 384))
'''