计算机视觉——相机标定之张正友标定法
这里写目录标题
- 一.相机标定
- 1.相机标定原理
- 2.相机标定步骤
- 3.数据集其他注意事项
- 二.相机标定实验
- 1.数据集
- 2.代码实现
- 3.实验结果
- 4.代码解读
一.相机标定
1.相机标定原理
2.相机标定步骤
3.数据集其他注意事项
二.相机标定实验
1.数据集
2.代码实现
3.实验结果
4.代码解读
一.相机标定:
1.原理:
一般来说,标定的过程分为两个部分:
从世界坐标系转换为相机坐标系,这一步是三维点到三维点的转换,包括 R RR,t tt (相机外参)等参数。
从相机坐标系转为图像坐标系,这一步是三维点到二维点的转换,包括 K KK(相机内参)等参数。
简单来说就是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵 P PP 的过程。
2.相机标定的步骤
1).准备一个张正友标定法的棋盘格,棋盘格大小已知,用相机对其进行不同角度的拍摄,得到一组图像(标定图片的数量通常在15~25张之间,图像数量太少,容易导致标定参数不准确。);
2).对图像中的特征点如标定板角点进行检测,得到标定板角点的像素坐标值,根据已知的棋盘格大小和世界坐标系原点,计算得到标定板角点的物理坐标值;
3).求解内参矩阵与外参矩阵。根据物理坐标值和像素坐标值的关系,求出H矩阵,进而构造v矩阵,求解B矩阵,利用B矩阵求解相机内参矩阵A,最后求解每张图片对应的相机外参矩阵;
4).求解畸变参数。利用u^,u, v^,v构造矩阵,计算径向畸变参数;
5).利用L-M(Levenberg-Marquardt)算法对上述参数进行优化。
**** 张正友标定法算法步骤:
标定板图像输入–>角点坐标提取–>构造方程–>参数解算–>最小二乘法参数估计–>最大似然参数优化–>畸变参数计算–>畸变矫正–>输出矫正图像
3.其他注意事项:
1).准备数据集时,标定板拍摄的张数要能覆盖整个测量空间及整个测量视场,把相机图像分成四个象限,应保证拍摄的标定板图像均匀分布在四个象限中,且在每个象限中建议进行不同方向的两次倾斜;
2).圆或者圆环特征的像素数尽量大于20,标定板的成像尺寸应大致占整幅画面的1/4;
3).用辅助光源对标定板进行打光,保证标定板的亮度足够且均匀;
4).标定板成像不能过爆,过爆会导致特征轮廓的提取的偏移,从而导致圆心提取不准确;
5).标定板特征成像不能出现明显的离焦距,出现离焦时可通过调整调整标定板的距离、光圈的大小和像距(对于定焦镜头,通常说的调焦就是指调整像距);
6).标定过程,相机的光圈、焦距不能发生改变,改变需要重新标定;
二.相机标定实验
1.数据集:
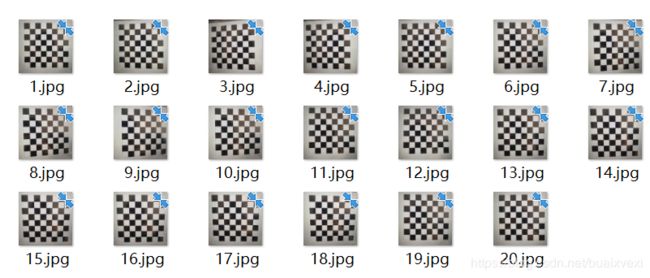
角点范围是(7,7)
2.代码实现:
calib_RGB.py
# -*- coding: utf-8 -*-
"""
Homework: Calibrate the Camera with ZhangZhengyou Method.
Picture File Folder: ".\pic\RGB_camera_calib_img", Without Distort.
By YouZhiyuan 2019.11.18
"""
import os
import numpy as np
import cv2
import glob
def calib(inter_corner_shape, size_per_grid, img_dir,img_type):
# criteria: only for subpix calibration, which is not used here.
# criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
w,h = inter_corner_shape
# cp_int: corner point in int form, save the coordinate of corner points in world sapce in 'int' form
# like (0,0,0), (1,0,0), (2,0,0) ....,(10,7,0).
cp_int = np.zeros((w*h,3), np.float32)
cp_int[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
# cp_world: corner point in world space, save the coordinate of corner points in world space.
cp_world = cp_int*size_per_grid
obj_points = [] # the points in world space
img_points = [] # the points in image space (relevant to obj_points)
images = glob.glob(img_dir + os.sep + '**.' + img_type)
for fname in images:
img = cv2.imread(fname)
gray_img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# find the corners, cp_img: corner points in pixel space.
ret, cp_img = cv2.findChessboardCorners(gray_img, (w,h), None)
# if ret is True, save.
if ret == True:
# cv2.cornerSubPix(gray_img,cp_img,(11,11),(-1,-1),criteria)
obj_points.append(cp_world)
img_points.append(cp_img)
# view the corners
cv2.drawChessboardCorners(img, (w,h), cp_img, ret)
cv2.imshow('FoundCorners',img)
cv2.waitKey(1)
cv2.destroyAllWindows()
# calibrate the camera
ret, mat_inter, coff_dis, v_rot, v_trans = cv2.calibrateCamera(obj_points, img_points, gray_img.shape[::-1], None, None)
print (("ret:"),ret)
print (("internal matrix:\n"),mat_inter)
# in the form of (k_1,k_2,p_1,p_2,k_3)
print (("distortion cofficients:\n"),coff_dis)
print (("rotation vectors:\n"),v_rot)
print (("translation vectors:\n"),v_trans)
# calculate the error of reproject
total_error = 0
for i in range(len(obj_points)):
img_points_repro, _ = cv2.projectPoints(obj_points[i], v_rot[i], v_trans[i], mat_inter, coff_dis)
error = cv2.norm(img_points[i], img_points_repro, cv2.NORM_L2)/len(img_points_repro)
total_error += error
print(("Average Error of Reproject: "), total_error/len(obj_points))
return mat_inter, coff_dis
if __name__ == '__main__':
inter_corner_shape = (7,7)
size_per_grid = 1.5
img_dir = "C://Users//pc//Desktop//pic//RGB_img"
img_type = "jpg"
calib(inter_corner_shape, size_per_grid, img_dir,img_type)
calib_IR.py
# -*- coding: utf-8 -*-
"""
Homework: Calibrate the Camera with ZhangZhengyou Method.
Picture File Folder: ".\pic\IR_camera_calib_img", With Distort.
By YouZhiyuan 2019.11.18
"""
import os
import numpy as np
import cv2
import glob
import pylab
def calib(inter_corner_shape, size_per_grid, img_dir,img_type):
# criteria: only for subpix calibration, which is not used here.
# criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
w,h = inter_corner_shape
# cp_int: corner point in int form, save the coordinate of corner points in world sapce in 'int' form
# like (0,0,0), (1,0,0), (2,0,0) ....,(10,7,0).
cp_int = np.zeros((w*h,3), np.float32)
cp_int[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
# cp_world: corner point in world space, save the coordinate of corner points in world space.
cp_world = cp_int*size_per_grid
obj_points = [] # the points in world space
img_points = [] # the points in image space (relevant to obj_points)
images = glob.glob(img_dir + os.sep + '**.' + img_type)
for fname in images:
img = cv2.imread(fname)
gray_img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# find the corners, cp_img: corner points in pixel space.
ret, cp_img = cv2.findChessboardCorners(gray_img, (w,h), None)
# if ret is True, save.
if ret == True:
# cv2.cornerSubPix(gray_img,cp_img,(11,11),(-1,-1),criteria)
obj_points.append(cp_world)
img_points.append(cp_img)
# view the corners
cv2.drawChessboardCorners(img, (w,h), cp_img, ret)
cv2.imshow('FoundCorners',img)
cv2.waitKey(10)
cv2.destroyAllWindows()
# calibrate the camera
ret, mat_inter, coff_dis, v_rot, v_trans = cv2.calibrateCamera(obj_points, img_points, gray_img.shape[::-1], None, None)
print (("ret:"),ret)
print (("internal matrix:\n"),mat_inter)
# in the form of (k_1,k_2,p_1,p_2,k_3)
print (("distortion cofficients:\n"),coff_dis)
print (("rotation vectors:\n"),v_rot)
print (("translation vectors:\n"),v_trans)
# calculate the error of reproject
total_error = 0
for i in range(len(obj_points)):
img_points_repro, _ = cv2.projectPoints(obj_points[i], v_rot[i], v_trans[i], mat_inter, coff_dis)
error = cv2.norm(img_points[i], img_points_repro, cv2.NORM_L2)/len(img_points_repro)
total_error += error
print(("Average Error of Reproject: "), total_error/len(obj_points))
return mat_inter, coff_dis
def dedistortion(inter_corner_shape, img_dir,img_type, save_dir, mat_inter, coff_dis):
w,h = inter_corner_shape
images = glob.glob(img_dir + os.sep + '**.' + img_type)
for fname in images:
img_name = fname.split(os.sep)[-1]
img = cv2.imread(fname)
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mat_inter,coff_dis,(w,h),0,(w,h)) # 自由比例参数
dst = cv2.undistort(img, mat_inter, coff_dis, None, newcameramtx)
# clip the image
# x,y,w,h = roi
# dst = dst[y:y+h, x:x+w]
cv2.imwrite(save_dir + os.sep + img_name, dst)
print('Dedistorted images have been saved to: %s successfully.' %save_dir)
if __name__ == '__main__':
inter_corner_shape = (11,8)
size_per_grid = 0.02
img_dir = "C://Users//Garfield//Desktop//pic//IR_camera_calib_img"
img_type = "png"
# calibrate the camera
mat_inter, coff_dis = calib(inter_corner_shape, size_per_grid, img_dir,img_type)
# dedistort and save the dedistortion result.
save_dir = "C://Users//Garfield//Desktop//pic//save_dedistortion"
if(not os.path.exists(save_dir)):
os.makedirs(save_dir)
dedistortion(inter_corner_shape, img_dir, img_type, save_dir, mat_inter, coff_dis)
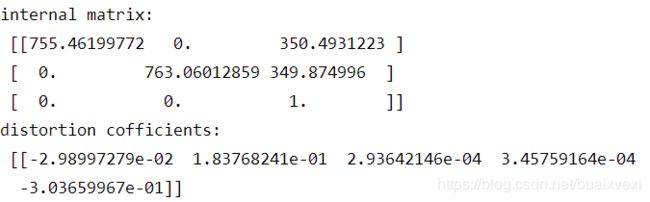
3.实验结果:
![]()
内置矩阵:
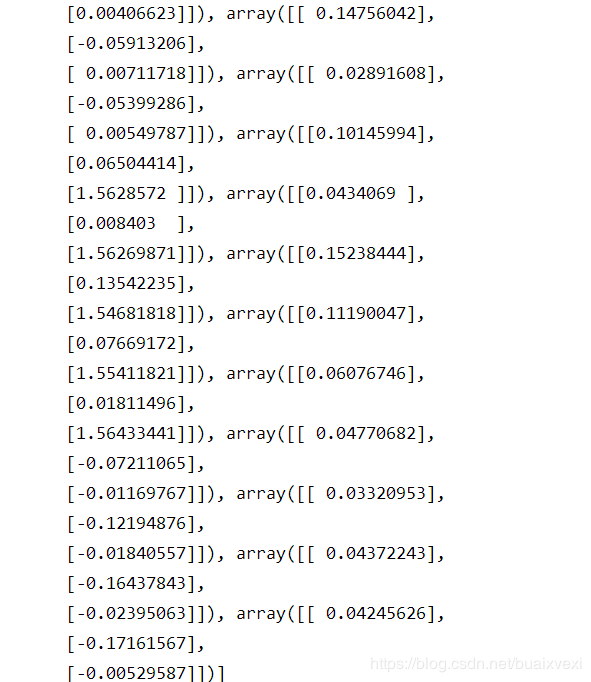
旋转向量:

平移向量:
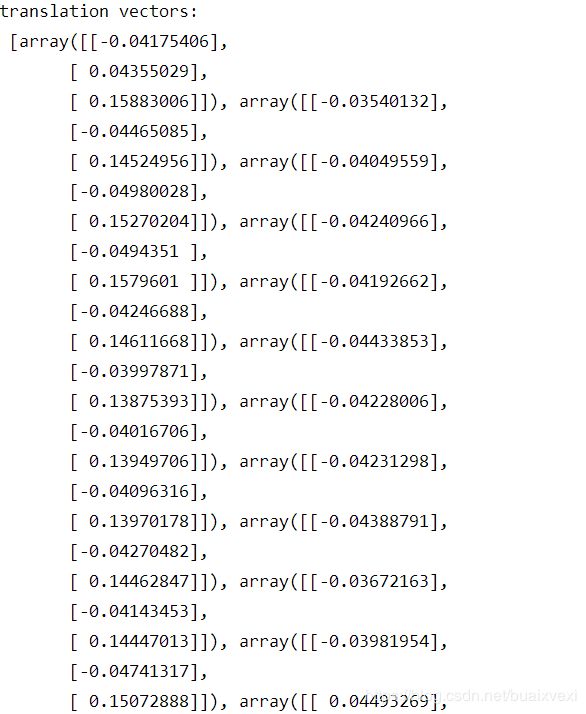

平均重投影误差约为0.0409
4.代码解读
标定:
显示角点位置(可选):cv2.drawChessboardCorners
image =cv.drawChessboardCorners(image, patternSize, corners, patternWasFound )
进行标定,计算参数cv2.calibrateCamera
retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv.calibrateCamera( objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs[, rvecs[, tvecs[, flags[, criteria]]]])
calibrateCamera(obj_points, img_points, size, None, None)函数的参数:
输入:
object_points :世界坐标系中的点。
image_points :其对应的图像点。
size :图像的大小,在计算相机的内参数和畸变矩阵需要用到;
输出:
mtx :内参数矩阵。
dist :畸变矩阵。
rvecs :旋转向量。
tvecs :位移向量