手把手教用matlab做无人驾驶(一)-三次样条插值生成轨迹
matlab做深度学习会继续更新,这里最近看这个,所有写了这个:
关于理论部分可以看这篇文章,https://blog.csdn.net/adamshan/article/details/80696881,
1.3 算法总结
假定有n+1个数据节点
![]()
a. 计算步长![]() (i = 0, 1, …, n-1)
(i = 0, 1, …, n-1)
b. 将数据节点和指定的首位端点条件带入矩阵方程
c. 解矩阵方程,求得二次微分值![]() 。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。
。该矩阵为三对角矩阵,具体求法参见我的上篇文章:三对角矩阵的求解。
d. 计算样条曲线的系数:
其中i = 0, 1, …, n-1
e. 在每个子区间![]() 中,创建方程
中,创建方程
![]()
matlab程序,这里function程序是计算a、b、c、d:
function [a,b,c,d]=cubic(x,y)
%{
这段程序主要是求三次样条插值的系数 y=ax^3+bx^2+cx+d
作者:Robert.Cao
%}
nx=length(x); %计算x长度
h=diff(x); %计算x之间的差
a=y; %系数a
A=zeros(7,7);
A=[1,1];
for i=2:nx
if i~=nx
A(i,i)= 2.0 * (h(i-1) + h(i));
end
A(i, i-1)= h(i-1);
A(i-1, i)= h(i-1);
A(1,2) = 0.0;
A(nx,nx - 1)= 0.0;
A(nx, nx)= 1.0;
end
B=zeros(7,1);
for i=2:nx-1
B(i,1)=6.0 * (a(i + 1) - a(i)) / h(i) - 6.0 * (a(i) -a(i-1)) / h(i-1);
end
m=inv(A)*B; %解方程组求m
c=m/2.0; %系数c
for i=1:nx-1
d(i)=(c(i + 1) - c(i)) / (3.0 * h(i)); %计算系数d
b(i) = (a(i + 1) - a(i)) / h(i) - h(i) * (c(i + 1) + 2.0 * c(i)) / 3.0;%系数b
end
主函数程序:
x = [-4., -2, 0.0, 2, 4, 6, 10];
y = [1.2, 0.6, 0.0, 1.5, 3.8, 5.0, 3.0];
[a,b,c,d]=cubic(x,y);
mx=-4:0.01:10;
L=length(mx);
for i=1:L
rx=mx(i);
if rx==10
rx=rx-0.01;
else
rx=rx;
end
rx=floor(rx);
if mod(rx,2)==0
rx=rx;
else
rx=rx-1;
end
if rx==8
rx=rx-2;
else
rx=rx;
end
low = 0;
high = length(x);
while(low <= high)
mid = (low + high)/2;
mid=ceil(mid)
midval = x(mid);
if midval < rx
low = mid + 1;
elseif midval > rx
high = mid - 1;
else
nx(i)=mid;
break;
end
end
end
for i=1:L
dx(i)=mx(i)-x(nx(i));
ry(i) = a(nx(i))+ b(nx(i)) * dx(i)+ c(nx(i))* dx(i) ^ 2.0 +d(nx(i)) * dx(i)^3.0;
end
figure
plot(x,y)
hold on
plot(mx,ry,'-r')
这里查找用了二分法查找。
仿真结果如下:
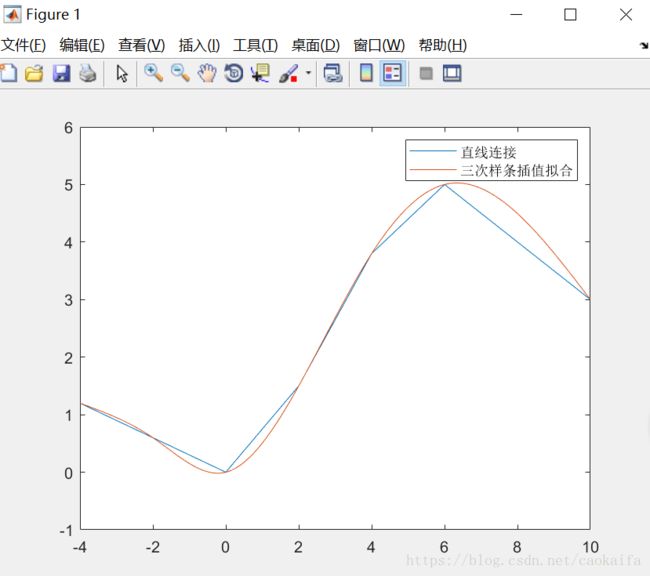
从图中可以看出拟合的结果。