(三)ROS中控制机器人运动的实现(在gazebo中显示)
ROS中控制机器人运动主要流程如下
新建模型—>加载驱动插件—>启动模型和节点->显示
有了机器人模型还不行,在Gazebo中仿真需要控制模型。模型中有轮子,需要控制轮子转动,控制轮子转动就需要加载驱动。
步骤:
(1)编辑机器人模型
(2)编辑gazebo属性,加载连接器控制驱动插件
(3)编辑gazebo属性,加载ros控制插件
(4)编辑.launch文件
(5)安装键盘控制器包
(6)运行.launch和键盘控制器程序,让小车动起来。
注意:xacro文件可以包含机器人模型的描述如
首先是要创建包,配置环境变量等操作,就不详述了。
然后的(1)(2)(3)步骤都是通过编辑.xacro文件实现。
在工程目录下的urdf文件夹下新建my_move_robot.xacro文件。
1.编辑机器人模型
在my_move_robot.xacro文件下加入以下代码,代码包含的元素有车身,关节,轮子,
其中车身通过固定关节连接,包括三个标签
a)车身
,
<link name="base_link">b)轮子
c)轮子和机身的连接
my_move_robot.xacro文件如下
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
name="robot1_xacro">
<xacro:property name="length_wheel" value="0.05" />
<xacro:property name="radius_wheel" value="0.05" />
<xacro:macro name="default_inertial" params="mass">
<inertial>
<mass value="${mass}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
inertial>
xacro:macro>
<link name="base_footprint">
<visual>
<geometry>
<box size="0.001 0.001 0.001"/>
geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
visual>
<xacro:default_inertial mass="0.0001"/>
link>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 0" />
<parent link="base_footprint" />
<child link="base_link" />
joint>
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
geometry>
<origin rpy="0 0 1.54" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
material>
visual>
<collision>
<geometry>
<box size="0.2 .3 0.1"/>
geometry>
collision>
<xacro:default_inertial mass="10"/>
link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
material>
visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
collision>
<xacro:default_inertial mass="1"/>
link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
collision>
<xacro:default_inertial mass="1"/>
link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
collision>
<xacro:default_inertial mass="1"/>
link>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
<origin rpy="0 0 0" xyz="0 0 0" />
<material name="black"/>
visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
geometry>
collision>
<xacro:default_inertial mass="1"/>
link>
<joint name="base_to_wheel1" type="continuous">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin rpy="1.5707 0 0" xyz="0.1 0.15 0"/>
<axis xyz="0 0 1" />
joint>
<joint name="base_to_wheel2" type="continuous">
<axis xyz="0 0 1" />
<anchor xyz="0 0 0" />
<limit effort="100" velocity="100" />
<parent link="base_link"/>
<child link="wheel_2"/>
<origin rpy="1.5707 0 0" xyz="-0.1 0.15 0"/>
joint>
<joint name="base_to_wheel3" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_3"/>
<origin rpy="1.5707 0 0" xyz="0.1 -0.15 0"/>
joint>
<joint name="base_to_wheel4" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_4"/>
<origin rpy="1.5707 0 0" xyz="-0.1 -0.15 0"/>
joint>
robot>2.编辑gazebo属性,加载连接器控制驱动插件
在文件my_move_robot.xacro中加入连接器控制驱动插件代码,内容很简单,加载插件的动态链接库。
<gazebo>
<plugin name="skid_steer_drive_controller" filename="libgazebo_ros_skid_steer_drive.so">
<updateRate>100.0updateRate>
<robotNamespace>robotNamespace>
<leftFrontJoint>base_to_wheel1leftFrontJoint>
<rightFrontJoint>base_to_wheel3rightFrontJoint>
<leftRearJoint>base_to_wheel2leftRearJoint>
<rightRearJoint>base_to_wheel4rightRearJoint>
<wheelSeparation>4wheelSeparation>
<wheelDiameter>0.1wheelDiameter>
<commandTopic>cmd_velcommandTopic>
<odometryTopic>odomodometryTopic>
<robotBaseFrame>base_footprintrobotBaseFrame>
<odometryFrame>odomodometryFrame>
<torque>1torque>
<topicName>cmd_veltopicName>
<broadcastTF>1broadcastTF>
plugin>
gazebo>3.编辑gazebo属性,加载ros控制插件
在文件my_move_robot.xacro中加入ros控制插件代码,如下
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/robotrobotNamespace>
plugin>
gazebo>4.编辑.launch文件
文件很简单,内容包括加载一个空的地图,加载机器人模型,启动一个urdf_spawner服务节点。注意$(find gazebotest)表示我的工程包的文件目录。
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
include>
<param name="robot_description"
command="$(find xacro)/xacro.py '$(find gazebotest)/urdf/my_move_robot.xacro'" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model robot1 -param robot_description -z 0.05"/>
launch>
5.安装键盘控制器包
使用如下命令安装
sudo apt-get install ros-hydro-teleop-twist-keyboard
rosstack profile
rospack profile6.启动并运行,让小车动起来
a)启动.launch文件
roslaunch gazebotest my_move_roboot.launch其中gazebotest为当前包的名字,此包要在ROS_PACK_PATH环境变量中。
my_move_roboot.launch为脚本,相当于一系列控制台命令
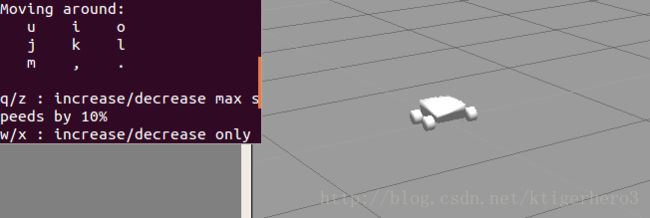
b)启动键盘控制器
rosrun teleop_twist_keyboard teleop_twist_keyboard.py使用键盘控制可以看到小车在移动
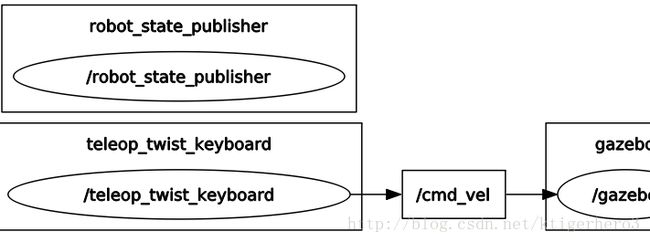
在控制台输入rqt_graph,可以看到节点图如下