L298N驱动小车+红外循迹+蓝牙控制
学习视频:https://www.youtube.com/watch?v=Da4HY7HZ6h0
循迹模块
在此我们使用循迹模块TCRT5000,该模块体积小,灵敏度较高,还可以通过转动上面的电位器来调节检测范围。

模块特色:
1、采用TCRT5000红外反射传感器
2、检测距离:1mm~8mm适用,焦点距离为2.5mm
3、比较器输出,信号干净,波形好,驱动能力强,超过15mA。
4、配多圈可调精密电位器调节灵敏度
5、工作电压3.3V-5V
6、输出形式 :数字开关量输出(0和1)
7、设有固定螺栓孔,方便安装
8、小板PCB尺寸:3.2cm x 1.4cm
9、使用宽电压LM393比较器
工作原理:
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管一直处于关断状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常量。
L298N驱动模块用法简介
一般拿到一个模块之后都要去对应的官网找到它的资料包,查看其详细用法,在某宝上买的模块一般店家都有整理好的资料包,所以某宝也是一个很好的资料库,大家一定要合理运用哦~
在此我们选用的是L298N模块,该模块引脚分配如下: 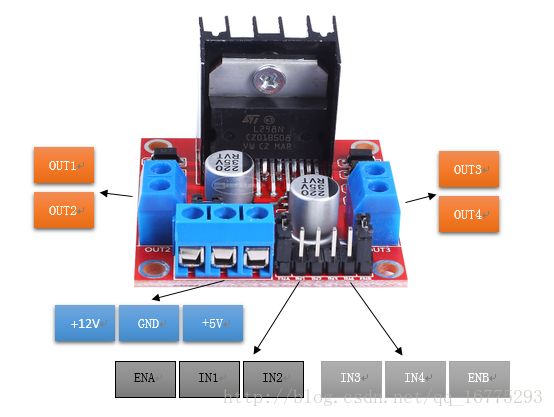
+12V:该引脚接的电压是驱动模块所能输出给电机的最大电压,一般 直接接电池。12V是由L298N芯片所能接受最大电压而定,一般介入5~12V电压。在此我们接入的电压为两节18650串联的电压,即3.7+3.7=7.4V;
GND: 在该项目中GND即为电源的负极,同时要保证Arduino开发板,驱动模块等所有模块的GND连在一起才可以正常工作。在某些复杂的项目中还需要区分数字地和模拟地,在此不做详细介绍。
+5V: L298N模块(注意不是L298N芯片)内含稳压电路(将高电压转换为低电压的电路),在模块内部将”+12V”引脚输入的电压转化为可供开发板使用的+5V电压,一般将次输出接入到开发板为开发板供电。
L298N有两路输出,所以可以控制小车前进、后退、转弯,其中:
ENA: 代表第一路输出的电压大小。驱动模块输出电压越高,电机转速越快。
1.当其输入为0V的时候,驱动模块输出对第一路电机输出电压为0V;
2.当其输入为3.3V的时候,驱动模块对第一路电机输出电压为”+12V”引脚的输入电压。
3.由于ENA输入电压的高低控制驱动对电机的输出电压,因此当我们需要对小车运动速度进行控制的时候,一般通过PWM对”ENA”引脚进行控制。
IN1/IN2:这两个引脚控制电机正反转方向。例:假如IN1输入高电平3.3V,IN2输入低电平0V,ENA为3.3V,电机正转,此时将IN1输入改为0V,IN2输入改为3.3V,其他条件不变,则电机将会反转。
OUT1/OUT2:这两个引脚分别接电机的两极。
ENB,IN3/IN4,OUT3/OUT4引脚控制第二路输出,与上述ENB,IN3/IN4,OUT3/OUT4功能相似。
驱动安装
将准备好的驱动模块固定在小车,将从地盘电机延长出来的导线分左右两边分开,左边两个电机中每一个电机的其中一根线OUT1,另外一个接OUT2。同理,右边两个电机中每一个电机的其中一根线OUT3,另外一个接OUT4,并用螺丝刀将拧蓝色接线柱上方的螺丝拧紧。
电池座固定
将电池固定在小车尾部,将电源的两根线链接到+12V和GND引脚,红色代表正极,接到+12V,黑色代表负极,接到GND(一般电路中默认红色为正,黑色为负),并拧紧螺丝固定。
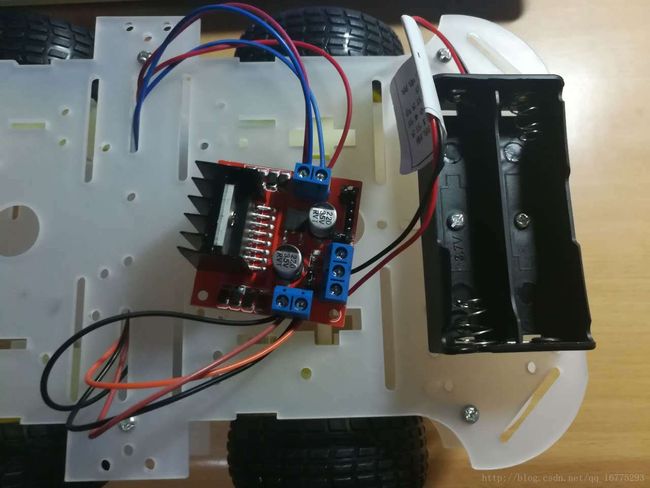
Ardunio开发板安装
将Arduno板子用螺丝固定在小车中部,由于小车运动中也需要对开发板供电,此时我们用两根公对公的杜邦线为其供电,红色(也可以为其他颜色)杜邦线一边插入Arduino板的”5V”引脚,一边插到L298N驱动的”+5V”引脚,黑色(也可以为其他颜色)杜邦线一边插入Arduino板的”GND”引脚,一边插到L298N驱动的”GND”引脚。
为控制电机的正反转,此时我们需要拿四根公对母杜邦线,将L298N驱动的IN1/IN2/IN3/IN3引脚与Arduino板的4/5/6/7号引脚对应相连,最终拼装图如下:

抱歉,接线有点乱,大家可以用扎带或者皮筋将其捆好固定
至此,我们的小车基本拼装完成,接下来就要开始写程序来控制小车运动咯,有没有很激动~
Ardunio程序编写
Arduino的程序编写一般使用Arduino IDE,该软件安装比较简单,大家可以自行安装,安装成功后打开IDE,在程序里写入下述代码:
// CurieBLE - Version: Latest
#include
//定义五中运动状态
#define STOP 0
#define FORWARD 1
#define BACKWARD 2
#define TURNLEFT 3
#define TURNRIGHT 4
//定义需要用到的引脚
int leftMotor1 = 4;
int leftMotor2 = 5;
int rightMotor1 = 6;
int rightMotor2 = 7;
int leftPWM = 9;
int rightPWM = 3;
//定义红外循迹引脚
int trac1 = 10; //从车头方向的最右边开始排序
int trac2 = 11;
int trac3 = 12;
int trac4 = 13;
void setup() {
Serial.begin(9600); //设置串口通信
// put your setup code here, to run once:
//设置控制电机的引脚为输出状态
pinMode(leftMotor1, OUTPUT);
pinMode(leftMotor2, OUTPUT);
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
pinMode(leftPWM, OUTPUT);
pinMode(rightPWM, OUTPUT);
//定义循迹模块
pinMode(trac1, INPUT);
pinMode(trac2, INPUT);
pinMode(trac3, INPUT);
pinMode(trac4, INPUT);
}
void loop()
{
tracing();
}
void tracing()
{
int data[4];
data[0] = digitalRead(10);
data[1] = digitalRead(11);
data[2] = digitalRead(12);
data[3] = digitalRead(13);
if(data[0] && data[1] && data[2] && data[3]) //左右都没有检测到黑线
{
motorRun(FORWARD, 255);
}
if(!data[0] || !data[1]) //右边检测到黑线
{
motorRun(TURNRIGHT, 160);
}
if(!data[2] || !data[3]) //左边检测到黑线
{
motorRun(TURNLEFT, 100);
}
if(!data[0] && !data[3]) //左右都检测到黑线是停止
{
motorRun(STOP, 40);
}
Serial.print(data[0]);
Serial.print("---");
Serial.print(data[1]);
Serial.print("---");
Serial.print(data[2]);
Serial.print("---");
Serial.println(data[3]);
}
void loop2() {
char data='1';
int temp=0;
if(Serial.available()>0)
{
char cmd = Serial.read();//读取蓝牙模块发送到串口的数据
switch(cmd){
case '1':
temp=1;
break;
case '2':
temp=2;
break;
case '3':
temp=3;
break;
case '4':
temp=4;
break;
case '0':
temp=0;
break;
}
motorRun(temp,100);
}
}
//运动控制函数
void motorRun(int cmd,int value)
{
analogWrite(leftPWM, value);
analogWrite(rightPWM, value);
switch(cmd){
case FORWARD :
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
case BACKWARD:
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
break;
case TURNLEFT:
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
case TURNRIGHT:
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
break;
default:
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
}
}