- 探索Gemini Balance:Google Gemini API的代理与负载均衡解决方案
几道之旅
人工智能智能体及数字员工负载均衡运维人工智能
引言在人工智能领域,API的高效使用和管理至关重要。尤其是当涉及到Google的GeminiAPI时,为了实现更稳定、更高效的服务,我们需要一个强大的代理和负载均衡工具。今天,我们就来深入了解一下GeminiBalance这个开源项目,它为GeminiAPI的使用提供了全面而灵活的解决方案。项目概述GeminiBalance是一个基于PythonFastAPI构建的应用程序,主要用于提供Googl
- 喜讯!Apache SeaTunnel 荣获上海开源创新菁英荟优秀开源项目奖
数据库
近日,在2025上海开源创新菁英荟上,ApacheSeaTunnel凭借信创生态适配与智能化技术突破,荣获「优秀开源项目奖」。这个由中国团队孵化的开源项目,已成为全球数据集成领域的标杆。信创生态:支持20+国产数据库的无缝对接SeaTunnel深度适配华为OpenGauss、阿里OceanBase等20+主流国产数据库,支持CDC(变更数据捕获)与高性能加载。在证券行业信创转型中,SeaTunne
- 电子词典开源项目源代码完全解析
本文还有配套的精品资源,点击获取简介:电子词典作为数字化学习工具,已由传统硬件发展为可定制的开源软件应用。本源代码提供深入理解其工作机制的机会,包括用户界面设计、词典数据库、查询引擎、翻译算法等。源代码通常由主流编程语言编写,涉及到数据结构与算法、UI设计、数据库管理、自然语言处理、本地化与多语言支持、版本控制、软件工程、API接口以及开源社区的协作和交流。1.电子词典工作原理和定制功能电子词典工
- Muduo 定时器
小白书舍
c++网络
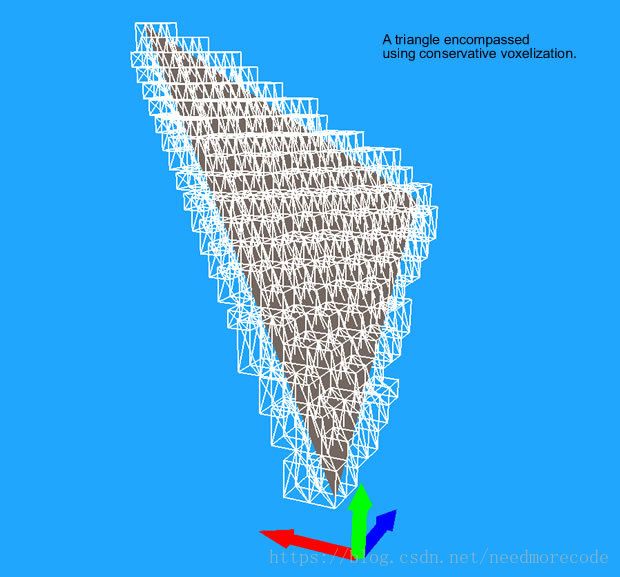
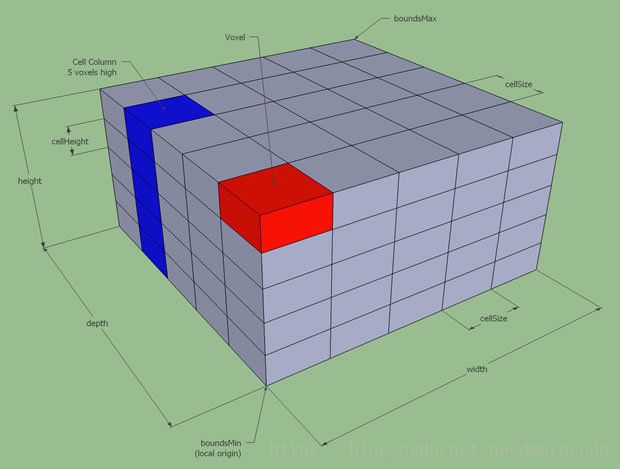
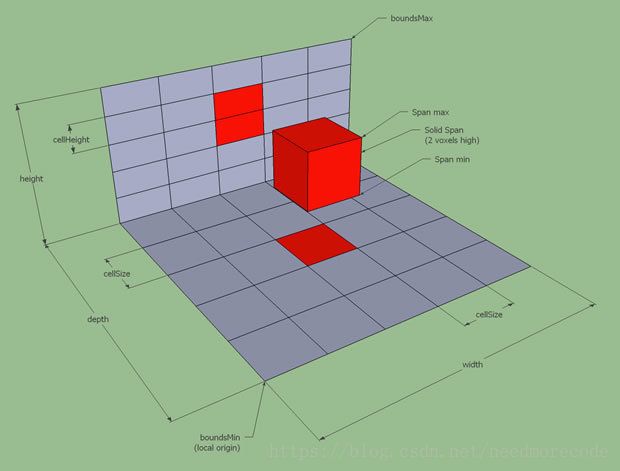
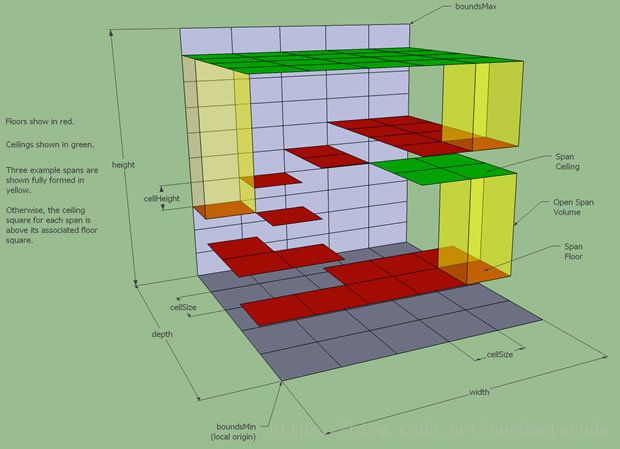
TimeQueue定时器图片转载自:muduo网络库源码解析(4):TimerQueue定时机制_李兆龙的技术博客_51CTO博客添加新的定时器TimerIdTimerQueue::addTimer(TimerCallbackcb,//用户自定义回调Timestampwhen,//定时器的超时时刻doubleinterval)//重复触发间隔,小于0则不重复触发{Timer*timer=newTi
- Github 2024-11-01 开源项目月报 Top19
老孙正经胡说
github开源Github趋势分析开源项目PythonGolang
根据GithubTrendings的统计,本月(2024-11-01统计)共有19个项目上榜。根据开发语言中项目的数量,汇总情况如下:开发语言项目数量Python项目9TypeScript项目3JavaScript项目3Svelte项目1JupyterNotebook项目1Ruby项目1HTML项目1Rust项目1Java项目1C++项目1Go项目1Python中的算法实现集合创建周期:2831天
- 【2025/06/30】GitHub 今日热门项目
Albert_Lsk
Github推荐github
GitHub今日热门项目每日精选优质开源项目|发现优质开源项目,跟上技术发展趋势报告概览统计项数值说明报告日期2025-06-30(周一)GitHubTrending每日快照数据时间16:11:02实时爬取生成项目总数16个精选热门开源项目⭐总星数381.3K社区认可度指标今日热度+4.5K24小时新增关注数据洞察核心指标项目总览16个精选项目⭐社区认可381.3K总星标数今日热度4.5K新增关注
- 打造你的WhatsApp沟通利器,API for WhatsApp Web多设备版本来了!
人工智能我来了
IT技术API
打造更强大的通讯工具:WhatsAppAPI多设备版在科技迅速发展的当下,如何利用高效、便捷的工具提高工作效率,成为企业和开发人员面临的热门话题。WhatsApp是全球最受欢迎的即时通讯软件之一,因此能够灵活地与WhatsApp对接、扩展其功能,将带来极为显著的效益。今天,我们来介绍一个强大的开源项目:WhatsAppAPI多设备版。这款应用不仅支持用户界面、Webhook和MCP,还能帮助开发人
- 告别DockerHub 镜像下载难题:掌握高效下载策略,畅享无缝开发体验
汀、人工智能
LLM技术汇总AIAgentLLM工业级落地实践dockerhubDocker加速器docker镜像下载RAGLLM大模型人工智能AIAgent
告别DockerHub镜像下载难题:掌握高效下载策略,畅享无缝开发体验1.介绍1.1DockerHub简介DockerHub是Docker提供的一项服务,用于与您的团队查找和共享容器映像。它是世界上最大的容器映像存储库,其中包含一系列内容源,包括容器社区开发人员,开源项目和独立软件供应商(ISV),它们在容器中构建和分发其代码。1.2DockerHub镜像加速器为何被禁止拉取访问6月6日,上海交大
- Tomcat 源码解析:深入理解 Tomcat 运行机制
深山懒羊羊
tomcatjava
Tomcat是Apache软件基金会的一个开源的Servlet容器和Web服务器,是JavaWeb开发中最常用的应用服务器之一。它实现了Servlet和JSP规范,广泛用于开发和部署JavaEEWeb应用程序。了解Tomcat的源码,能够帮助我们深入理解Web服务器的工作原理,以及如何优化和定制我们的JavaWeb环境。本文将对Tomcat的核心架构进行解析,重点关注Tomcat的启动过程、请求处
- 推荐开源项目:Embassy - 轻量级Swift HTTP服务器框架
戴艺音
推荐开源项目:Embassy-轻量级SwiftHTTP服务器框架EmbassySuperlightweightasyncHTTPserverlibraryinpureSwiftrunsiniOS/MacOS/Linux项目地址:https://gitcode.com/gh_mirrors/emb/Embassy项目介绍Embassy是一个由纯Swift编写的超轻量级异步HTTP服务器,仅包含约1.
- 我的第一个开源项目:用Python搭建轻量级静态网页服务器—— 零基础也能实现的Web开发初体验
一、为什么选择静态服务器?极简高效:无需数据库或复杂后端逻辑,适合展示简历、作品集等静态内容学习曲线平缓:是理解HTTP协议和Web服务原理的最佳入门方式资源消耗低:单文件Python脚本即可运行,内存占用小于10MB二、完整开发流程(含代码逐行解析)第一步:创建项目结构PWS/#项目根目录├──static/#静态资源文件夹│├──index.html#主页│├──style.css#样式表│└
- Python 安装使用 tesseract OCR 识别中文
花果山总钻风
Python/FlaskLinuxpythonocr开发语言
前言:i、中文识别效果更好的开源OCR库:CnOCR使用教程ii、6款开源中文OCR使用介绍(亲测效果):点我查看iii、windows安装tesserract教程:windows安装:点我查看教程1、点我查看教程2windows安装完成,设置好环境变量后,报找不到路径的错误点这里:解决办法本文为CentOS下安装教程Tesseract的OCR引擎目前已作为开源项目发布在GoogleProject
- 单片机开发全攻略:从零开始,迈向嵌入式开发高手之路
DTcode7
学习提升单片机mongodb嵌入式硬件
单片机开发全攻略:从零开始,迈向嵌入式开发高手之路一、单片机开发基础1.1单片机概述1.2开发环境搭建1.3编程语言与框架二、实战案例:LED闪烁2.1硬件准备2.2代码示例2.3解释三、高级应用:温度监控系统3.1硬件扩展3.2代码实现3.3解释四、开发技巧与问题排查4.1优化内存使用4.2问题排查思路4.3调试工具五、相关项目积分资源5.1在线学习资源5.2社区与论坛5.3开源项目结语与讨论在
- Godot Python 项目常见问题解决方案
GodotPython项目常见问题解决方案godot-pythonPythonsupportforGodot项目地址:https://gitcode.com/gh_mirrors/go/godot-python1.项目基础介绍和主要编程语言GodotPython是一个开源项目,旨在为Godot游戏引擎提供Python语言支持。这个项目允许开发者使用Python语言来编写Godot游戏脚本,从而充分
- 8 [GitHub开源项目被投毒后门病毒跟随开发流程传播蔓延]
学编程的闹钟
GitHubgithub开源
现如今,代码的开放给软件开发提供了诸多便利,GitHub就是其中极具代表性的平台。然而随着“开放”逐渐广泛,其被恶意利用的风险也随之增加。近年来,一种隐蔽又危险的攻击手段——代码投毒,悄悄成了威胁开发者和用户安全的隐患。攻击者会在开源项目或代码库里植入有害代码,这些看似正常的代码,一旦被开发者无意中引入,就会在开发链条中蔓延,最终让用户也面临安全风险。近期,火绒威胁情报中心监测到一批GitHub投
- 【GitHub开源项目实战】高频交易系统实战解析:基于 Nautilus Trader 的策略回测与事件驱动架构优化
观熵
GitHub开源项目实战github开源架构
高频交易系统实战解析:基于NautilusTrader的策略回测与事件驱动架构优化关键词:高频交易、事件驱动架构、NautilusTrader、量化回测、算法交易、PythonCython、交易引擎、回测系统、交易策略框架、实战优化摘要:本篇博客围绕GitHub上高质量的开源项目nautechsystems/nautilus_trader展开系统性实战解析。NautilusTrader是一套为专业
- 推荐开源项目:Jupyter 与 Nix 的完美结合
支然苹
推荐开源项目:Jupyter与Nix的完美结合jupyenvDeclarativeandreproducibleJupyterenvironments-poweredbyNix项目地址:https://gitcode.com/gh_mirrors/ju/jupyenv在数据科学与编程领域,JupyterNotebook已经成为不可或缺的工具,以其交互性和易于分享的特点深受开发者和研究人员的喜爱。然
- 【Git】第十六节:Fork & Pull Request 协作模型 —— 为开源项目贡献代码的完整指南
全栈前端老曹
git版本管理与工程化生态git开源javascriptweb源代码管理版本管理
第16节:Fork&PullRequest协作模型——为开源项目贡献代码的完整指南引言:成为开源项目的贡献者,构建高质量协作机制在开源社区中,Fork&PullRequest(PR)模型是最主流的协作方式。它允许开发者:在不影响主仓库的前提下进行修改;将自己的改动提交给原项目维护者审核;实现跨团队、跨地域的高效协作。本节课老曹将带你全面掌握:✅Fork的作用与使用方法✅如何从Fork创建分支并提交
- 探索工业自动化:C开发OPC Server开源项目推荐
翟俭妙
探索工业自动化:C#开发OPCServer开源项目推荐去发现同类优质开源项目:https://gitcode.com/项目介绍在工业自动化领域,OPC(OLEforProcessControl)标准是实现设备间数据交换的关键技术。为了帮助开发者更轻松地进入这一领域,我们推荐一个由社区贡献的C#开发OPCServer开源项目。该项目不仅提供了完整的源码,还包含了详细的使用文档和配置指南,适用于32位
- Gravitino 开源项目安装与使用指南
Gravitino开源项目安装与使用指南项目地址:https://gitcode.com/gh_mirrors/gra/gravitino一、项目目录结构及介绍Gravitino是一个基于GitHub的数据探索与分析平台,它提供了强大的工具来帮助用户高效地处理和理解数据。以下是项目的主要目录结构及其简要介绍:gravitino/│├──backend#后端服务代码,负责处理数据请求和业务逻辑。│├
- 开源项目收集
叶虽
开源项目mongodb数据库mysqlspringbootvue
全网各类开源项目收集1、SpringBoot+Vue完整的外卖系统,手机端和后台管理,附源码!2、JEECG-BOOT适合SAAS项目、企业信息管理系统,办公统计管理3、J-IM即时通讯系统1、SpringBoot+Vue完整的外卖系统,手机端和后台管理,附源码!flash-waimai一个完整的外卖系统,包括手机端,后台管理,api基于springboot和vue的前后端分离的外卖系统包含完整的
- 探索Lshort:一份现代 LaTeX 入门指南
司莹嫣Maude
探索Lshort:一份现代LaTeX入门指南项目地址:https://gitcode.com/gh_mirrors/ls/lshort是一个由PeterR.Oetiker创建并维护的开源项目,它提供了一份详尽且易于理解的LaTeX初学者指南。LaTeX是一种基于TeX的排版系统,广泛应用于学术论文、科技报告、书籍和各种专业文档的编写。Lshort通过清晰的结构和实例,帮助用户快速掌握LaTeX的基
- 独立开发者如何利用开源项目建立个人品牌并变现
AI天才研究院
ChatGPT计算AI人工智能与大数据开源ai
独立开发者如何利用开源项目建立个人品牌并变现关键词:独立开发者、开源项目、个人品牌、技术变现、社区运营摘要:本文从独立开发者的视角出发,结合真实案例与实战方法论,系统讲解如何通过开源项目打造个人技术品牌,并探索可持续的变现路径。内容涵盖开源项目的选题逻辑、社区运营技巧、品牌传播策略,以及赞助、付费服务等具体变现模式,帮助开发者从“代码生产者”升级为“技术品牌主理人”。背景介绍目的和范围在技术圈,“
- JVM核心技术解析
MoneyHacksPro
Java场景面试宝典JavaJVMClassLoading
我是廖志伟,一名Java开发工程师、《Java项目实战——深入理解大型互联网企业通用技术》(基础篇)、(进阶篇)、(架构篇)清华大学出版社签约作家、Java领域优质创作者、CSDN博客专家、阿里云专家博主、51CTO专家博主、产品软文专业写手、技术文章评审老师、技术类问卷调查设计师、幕后大佬社区创始人、开源项目贡献者。拥有多年一线研发和团队管理经验,研究过主流框架的底层源码(Spring、Spri
- 数据结构与算法:深度优先的实战指南
数据结构与算法:深度优先的实战指南关键词:深度优先搜索(DFS)、递归、栈、图遍历、路径查找、迷宫寻路、算法实战摘要:深度优先搜索(DFS)是计算机科学中最经典的算法之一,被广泛应用于路径查找、游戏AI、社交网络分析等场景。本文将用“迷宫探险”的故事串联核心概念,结合生活案例、代码实战和LeetCode经典题,带您从0到1掌握DFS的底层逻辑与实战技巧。即使你是算法新手,也能通过通俗易懂的讲解,真
- Gantt-Task-React 开源项目教程
白来存
Gantt-Task-React开源项目教程项目地址:https://gitcode.com/gh_mirrors/ga/gantt-task-react项目介绍Gantt-Task-React是一个基于React的甘特图组件,旨在帮助开发者快速集成甘特图功能到他们的项目中。该项目提供了丰富的功能,如任务管理、时间线展示、任务依赖关系等,适用于项目管理和进度跟踪。项目快速启动安装首先,确保你已经安
- React Gantt 项目教程
秋或依
ReactGantt项目教程react-ganttAganttchartforreact项目地址:https://gitcode.com/gh_mirrors/re/react-gantt项目介绍ReactGantt是一个基于React的甘特图组件,旨在为React应用程序提供一个高性能的甘特图解决方案。该项目由ClayRisser开发,是一个开源项目,托管在GitHub上。ReactGantt组
- LeetCode算法解析:全面掌握编程挑战与面试技能
黄浴
本文还有配套的精品资源,点击获取简介:LeetCode作为一个在线编程平台,提供了丰富的算法问题,帮助程序员提升编程技能和面试准备。内容覆盖了多种计算机科学领域,包括数据结构和算法,以及各类编程难题。解决这些问题有助于深化对编程语言、数据结构和算法的理解,并提高系统设计和软件开发能力。本解析可能会包含一个名为“leetcode-master”的开源项目,该项目包含了不同编程语言的LeetCode问
- 探索双11商业奇迹:基于天猫销售数据的可视化之旅
丁思锨
探索双11商业奇迹:基于天猫销售数据的可视化之旅【下载地址】天猫双11销售数据可视化资源文件天猫双11销售数据可视化资源文件项目地址:https://gitcode.com/open-source-toolkit/4e377在数字时代的大潮下,数据可视化已成为揭示商业秘密的强大武器。今天,我们特别推荐一个开源项目——“天猫双11销售数据可视化资源”,它如同一把钥匙,为你解锁双十一消费狂欢的深层洞见
- 深入理解AI技术与实践:如何贡献代码
Wurenyu957
人工智能
在现代AI技术的开发过程中,贡献代码是推动项目发展、提升技术能力的重要方式。在这篇文章中,我们将结合AI技术实践,深入探讨如何有效地为开源项目贡献代码,尤其是那些使用AI模型的项目。技术背景介绍AI技术的迅猛发展得益于开源社区的共享和协作。诸如TensorFlow、PyTorch等开源框架,极大地降低了AI模型开发的门槛。与此同时,越来越多的项目通过GitHub等平台开放源码,接受来自全球开发者的
- 继之前的线程循环加到窗口中运行
3213213333332132
javathreadJFrameJPanel
之前写了有关java线程的循环执行和结束,因为想制作成exe文件,想把执行的效果加到窗口上,所以就结合了JFrame和JPanel写了这个程序,这里直接贴出代码,在窗口上运行的效果下面有附图。
package thread;
import java.awt.Graphics;
import java.text.SimpleDateFormat;
import java.util
- linux 常用命令
BlueSkator
linux命令
1.grep
相信这个命令可以说是大家最常用的命令之一了。尤其是查询生产环境的日志,这个命令绝对是必不可少的。
但之前总是习惯于使用 (grep -n 关键字 文件名 )查出关键字以及该关键字所在的行数,然后再用 (sed -n '100,200p' 文件名),去查出该关键字之后的日志内容。
但其实还有更简便的办法,就是用(grep -B n、-A n、-C n 关键
- php heredoc原文档和nowdoc语法
dcj3sjt126com
PHPheredocnowdoc
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
<?
- overflow的属性
周华华
JavaScript
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- 《我所了解的Java》——总体目录
g21121
java
准备用一年左右时间写一个系列的文章《我所了解的Java》,目录及内容会不断完善及调整。
在编写相关内容时难免出现笔误、代码无法执行、名词理解错误等,请大家及时指出,我会第一时间更正。
&n
- [简单]docx4j常用方法小结
53873039oycg
docx
本代码基于docx4j-3.2.0,在office word 2007上测试通过。代码如下:
import java.io.File;
import java.io.FileInputStream;
import ja
- Spring配置学习
云端月影
spring配置
首先来看一个标准的Spring配置文件 applicationContext.xml
<?xml version="1.0" encoding="UTF-8"?>
<beans xmlns="http://www.springframework.org/schema/beans"
xmlns:xsi=&q
- Java新手入门的30个基本概念三
aijuans
java新手java 入门
17.Java中的每一个类都是从Object类扩展而来的。 18.object类中的equal和toString方法。 equal用于测试一个对象是否同另一个对象相等。 toString返回一个代表该对象的字符串,几乎每一个类都会重载该方法,以便返回当前状态的正确表示.(toString 方法是一个很重要的方法) 19.通用编程:任何类类型的所有值都可以同object类性的变量来代替。
- 《2008 IBM Rational 软件开发高峰论坛会议》小记
antonyup_2006
软件测试敏捷开发项目管理IBM活动
我一直想写些总结,用于交流和备忘,然都没提笔,今以一篇参加活动的感受小记开个头,呵呵!
其实参加《2008 IBM Rational 软件开发高峰论坛会议》是9月4号,那天刚好调休.但接着项目颇为忙,所以今天在中秋佳节的假期里整理了下.
参加这次活动是一个朋友给的一个邀请书,才知道有这样的一个活动,虽然现在项目暂时没用到IBM的解决方案,但觉的参与这样一个活动可以拓宽下视野和相关知识.
- PL/SQL的过程编程,异常,声明变量,PL/SQL块
百合不是茶
PL/SQL的过程编程异常PL/SQL块声明变量
PL/SQL;
过程;
符号;
变量;
PL/SQL块;
输出;
异常;
PL/SQL 是过程语言(Procedural Language)与结构化查询语言(SQL)结合而成的编程语言PL/SQL 是对 SQL 的扩展,sql的执行时每次都要写操作
- Mockito(三)--完整功能介绍
bijian1013
持续集成mockito单元测试
mockito官网:http://code.google.com/p/mockito/,打开documentation可以看到官方最新的文档资料。
一.使用mockito验证行为
//首先要import Mockito
import static org.mockito.Mockito.*;
//mo
- 精通Oracle10编程SQL(8)使用复合数据类型
bijian1013
oracle数据库plsql
/*
*使用复合数据类型
*/
--PL/SQL记录
--定义PL/SQL记录
--自定义PL/SQL记录
DECLARE
TYPE emp_record_type IS RECORD(
name emp.ename%TYPE,
salary emp.sal%TYPE,
dno emp.deptno%TYPE
);
emp_
- 【Linux常用命令一】grep命令
bit1129
Linux常用命令
grep命令格式
grep [option] pattern [file-list]
grep命令用于在指定的文件(一个或者多个,file-list)中查找包含模式串(pattern)的行,[option]用于控制grep命令的查找方式。
pattern可以是普通字符串,也可以是正则表达式,当查找的字符串包含正则表达式字符或者特
- mybatis3入门学习笔记
白糖_
sqlibatisqqjdbc配置管理
MyBatis 的前身就是iBatis,是一个数据持久层(ORM)框架。 MyBatis 是支持普通 SQL 查询,存储过程和高级映射的优秀持久层框架。MyBatis对JDBC进行了一次很浅的封装。
以前也学过iBatis,因为MyBatis是iBatis的升级版本,最初以为改动应该不大,实际结果是MyBatis对配置文件进行了一些大的改动,使整个框架更加方便人性化。
- Linux 命令神器:lsof 入门
ronin47
lsof
lsof是系统管理/安全的尤伯工具。我大多数时候用它来从系统获得与网络连接相关的信息,但那只是这个强大而又鲜为人知的应用的第一步。将这个工具称之为lsof真实名副其实,因为它是指“列出打开文件(lists openfiles)”。而有一点要切记,在Unix中一切(包括网络套接口)都是文件。
有趣的是,lsof也是有着最多
- java实现两个大数相加,可能存在溢出。
bylijinnan
java实现
import java.math.BigInteger;
import java.util.regex.Matcher;
import java.util.regex.Pattern;
public class BigIntegerAddition {
/**
* 题目:java实现两个大数相加,可能存在溢出。
* 如123456789 + 987654321
- Kettle学习资料分享,附大神用Kettle的一套流程完成对整个数据库迁移方法
Kai_Ge
Kettle
Kettle学习资料分享
Kettle 3.2 使用说明书
目录
概述..........................................................................................................................................7
1.Kettle 资源库管
- [货币与金融]钢之炼金术士
comsci
金融
自古以来,都有一些人在从事炼金术的工作.........但是很少有成功的
那么随着人类在理论物理和工程物理上面取得的一些突破性进展......
炼金术这个古老
- Toast原来也可以多样化
dai_lm
androidtoast
Style 1: 默认
Toast def = Toast.makeText(this, "default", Toast.LENGTH_SHORT);
def.show();
Style 2: 顶部显示
Toast top = Toast.makeText(this, "top", Toast.LENGTH_SHORT);
t
- java数据计算的几种解决方法3
datamachine
javahadoopibatisr-languer
4、iBatis
简单敏捷因此强大的数据计算层。和Hibernate不同,它鼓励写SQL,所以学习成本最低。同时它用最小的代价实现了计算脚本和JAVA代码的解耦,只用20%的代价就实现了hibernate 80%的功能,没实现的20%是计算脚本和数据库的解耦。
复杂计算环境是它的弱项,比如:分布式计算、复杂计算、非数据
- 向网页中插入透明Flash的方法和技巧
dcj3sjt126com
htmlWebFlash
将
Flash 作品插入网页的时候,我们有时候会需要将它设为透明,有时候我们需要在Flash的背面插入一些漂亮的图片,搭配出漂亮的效果……下面我们介绍一些将Flash插入网页中的一些透明的设置技巧。
一、Swf透明、无坐标控制 首先教大家最简单的插入Flash的代码,透明,无坐标控制: 注意wmode="transparent"是控制Flash是否透明
- ios UICollectionView的使用
dcj3sjt126com
UICollectionView的使用有两种方法,一种是继承UICollectionViewController,这个Controller会自带一个UICollectionView;另外一种是作为一个视图放在普通的UIViewController里面。
个人更喜欢第二种。下面采用第二种方式简单介绍一下UICollectionView的使用。
1.UIViewController实现委托,代码如
- Eos平台java公共逻辑
蕃薯耀
Eos平台java公共逻辑Eos平台java公共逻辑
Eos平台java公共逻辑
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年6月1日 17:20:4
- SpringMVC4零配置--Web上下文配置【MvcConfig】
hanqunfeng
springmvc4
与SpringSecurity的配置类似,spring同样为我们提供了一个实现类WebMvcConfigurationSupport和一个注解@EnableWebMvc以帮助我们减少bean的声明。
applicationContext-MvcConfig.xml
<!-- 启用注解,并定义组件查找规则 ,mvc层只负责扫描@Controller -->
<
- 解决ie和其他浏览器poi下载excel文件名乱码
jackyrong
Excel
使用poi,做传统的excel导出,然后想在浏览器中,让用户选择另存为,保存用户下载的xls文件,这个时候,可能的是在ie下出现乱码(ie,9,10,11),但在firefox,chrome下没乱码,
因此必须综合判断,编写一个工具类:
/**
*
* @Title: pro
- 挥洒泪水的青春
lampcy
编程生活程序员
2015年2月28日,我辞职了,离开了相处一年的触控,转过身--挥洒掉泪水,毅然来到了兄弟连,背负着许多的不解、质疑——”你一个零基础、脑子又不聪明的人,还敢跨行业,选择Unity3D?“,”真是不自量力••••••“,”真是初生牛犊不怕虎•••••“,••••••我只是淡淡一笑,拎着行李----坐上了通向挥洒泪水的青春之地——兄弟连!
这就是我青春的分割线,不后悔,只会去用泪水浇灌——已经来到
- 稳增长之中国股市两点意见-----严控做空,建立涨跌停版停牌重组机制
nannan408
对于股市,我们国家的监管还是有点拼的,但始终拼不过飞流直下的恐慌,为什么呢?
笔者首先支持股市的监管。对于股市越管越荡的现象,笔者认为首先是做空力量超过了股市自身的升力,并且对于跌停停牌重组的快速反应还没建立好,上市公司对于股价下跌没有很好的利好支撑。
我们来看美国和香港是怎么应对股灾的。美国是靠禁止重要股票做空,在
- 动态设置iframe高度(iframe高度自适应)
Rainbow702
JavaScriptiframecontentDocument高度自适应局部刷新
如果需要对画面中的部分区域作局部刷新,大家可能都会想到使用ajax。
但有些情况下,须使用在页面中嵌入一个iframe来作局部刷新。
对于使用iframe的情况,发现有一个问题,就是iframe中的页面的高度可能会很高,但是外面页面并不会被iframe内部页面给撑开,如下面的结构:
<div id="content">
<div id=&quo
- 用Rapael做图表
tntxia
rap
function drawReport(paper,attr,data){
var width = attr.width;
var height = attr.height;
var max = 0;
&nbs
- HTML5 bootstrap2网页兼容(支持IE10以下)
xiaoluode
html5bootstrap
<!DOCTYPE html>
<html>
<head lang="zh-CN">
<meta charset="UTF-8">
<meta http-equiv="X-UA-Compatible" content="IE=edge">