cv姿态评估:Levenberg-Marquardt优化-阻尼最小二乘(DLS)
'''
自己整理备忘,也供后人参考。
[email protected]
本节记录了cv姿态评估的常见思路,建立模型的方法与Levenberg-Marquardt优化原理。
在下一节中,我们将讨论如何在工程上将旋转向量、欧拉角与四元数之间进行转换。
'''基础知识:
仿射变换是计算机视觉领域应用十分广泛的特殊变换。是指在几何中,一个向量进行一次线性变换并接上一个平移,变换为另一个向量。对于一个三维直角坐标系,基于每个坐标轴的旋转具有的规则旋转空间的集合,可以表示任何三维向量。在有限维的情况,每个仿射变换可以由一个矩阵A和一个向量b给出,对应于一个矩阵和一个向量的乘法,而仿射变换的复合对应于普通的矩阵乘法,只要加入一个额外的行到矩阵的底下,这一行全部是0除了最右边是一个1,而列向量的底下要加上一个1。
一个对向量平移向量b,与旋转放大缩小 A的仿射映射为
在齐次坐标上,等价于
在分形的研究里,收缩平移仿射映射可以制造制具有自相似性的分形。一个在两个仿射空间之间的仿射变换,是在向量上呈现线性之坐标点的变换(即为空间中点与点之间的向量)。以符号表示的话, 使得 ,决定任一对点的线性变换:
或者
在二维坐标系上绕原点进行的二维旋转:

如图所示,当点v绕原点转动θ至v',假设v点的坐标是(x,y),那么可以推导得到v'(x',y'),过程如下:
参数如图,我们发现:
x=rcosϕ
y=rsinϕ
x′=rcos(θ+ϕ)
y′=rsin(θ+ϕ)
通过三角函数展开得:
x′=rcosθcosϕ−rsinθsinϕ
y′=rsinθcosϕ+rcosθsinϕ
代入x,y表达式可得:
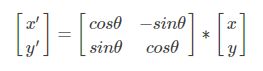
x′=xcosθ−ysinθ
y′=xsinθ+ycosθ
使用矩阵表示:
绕任意轴的三维旋转
绕任意轴的三维旋转可以将旋转分解为一系列基本的二维旋转,如图所示:
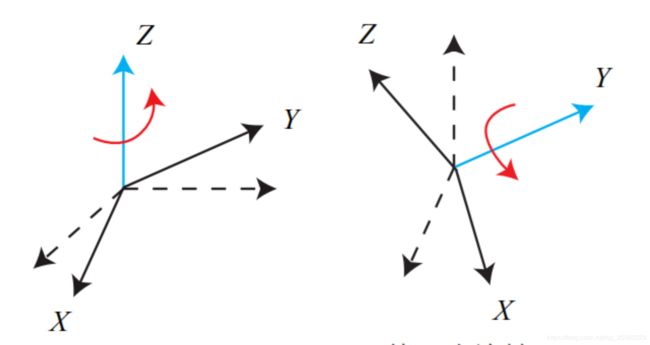
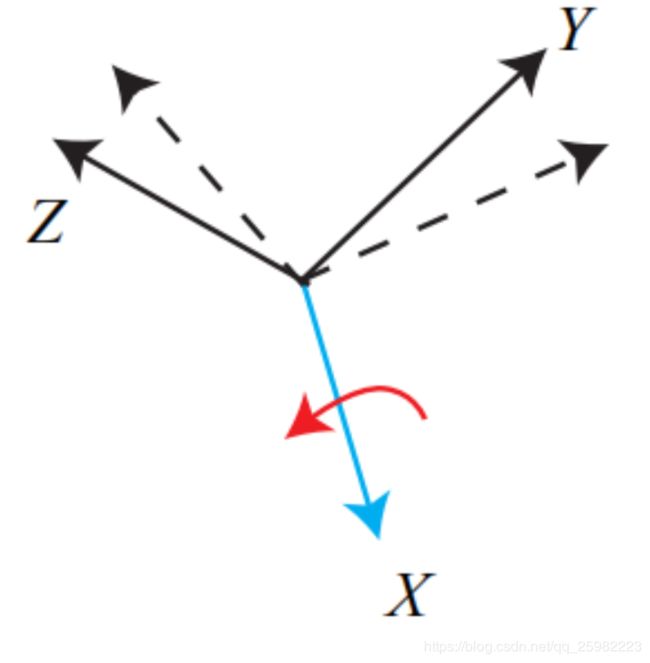
步骤一,二,三
什么是姿势估计?
在计算机视觉中,物体的姿势指的是其相对于相机的相对取向和位置。通过相对于相机移动对象或相对于对象移动相机来更改姿势。
姿势由上下翻转(pitch),左右翻转(yaw),平面内旋转(roll)构成。
比如,人脸姿态估计的思想:旋转三维标准模型一定角度,直到模型上“三维特征点”的“2维投影”,与待测试图像上的特征点(图像上的特征点显然是2维)尽量重合。这时候我们脑海中就应该浮现出一种诡异的场景:在幽暗的灯光中,一个发着淡蓝色光芒的人皮面具一点点的“自我调整”,突然一下子“完美无缺”的“扣在了你的脸上”。这就是人脸姿态估计的思想。
计算图像中对象的3D姿势,需要以下几个参量:
1.几个点的2D坐标。
在工程中,通常使用dlib的detector。
2.相同点的3D位置
代表2D要素点的3D位置。理想情况下需要照片中人物的3D模型才能获得3D位置。但在实践中,通用3D模型就足够了。只需要在某个任意参考系中的几个点的3D位置。通常来说,使用以下3D点。
- 鼻尖:(0.0,0.0,0.0)
- 下巴:(0.0,-330.0,-65.0)
- 左眼左角:( - 225.0f,170.0f,-135.0)
- 右眼右角:(225.0,170.0,-135.0)
- 口的左角:( - 150.0,-150.0,-125.0)
- 嘴角:(150.0,-150.0,-125.0)
3.相机的光学参数
相机的光学参数包括图像的光学中心和径向失真参数,所以我们必须校准相机。具体方法在这里不再多说,我们假设相机已经被校准。
姿态估计算法原理

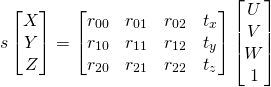
这里有三个坐标系。上面显示的各种面部特征的3D坐标是世界坐标。如果我们知道旋转和平移参量,我们可以将世界坐标中的3D点转换为相机坐标中的 3D点。可以使用相机的固有参数(焦距,光学中心等)将相机坐标中的3D点投影到图像平面(即图像坐标系)上。
假设我们知道世界坐标中 3D点的位置
3D点的位置 。如果我们知道相对于相机坐标的世界坐标的旋转
。如果我们知道相对于相机坐标的世界坐标的旋转 (3×3矩阵)和平移
(3×3矩阵)和平移 (3×1矢量),我们可以使用以下等式计算相机坐标系
(3×1矢量),我们可以使用以下等式计算相机坐标系 中点的位置。
中点的位置。

将它展开:

如果我们知道足够数量的点对应(即和 ),上面就是一个线性方程组,其中
),上面就是一个线性方程组,其中 和
和 是未知数,可以很容易被求出。
是未知数,可以很容易被求出。
3D模型上的许多点(即)是给出的,但我们不知道。我们只知道2D点的位置(即 )。在不考虑径向畸变的情况下,图像坐标中的点
)。在不考虑径向畸变的情况下,图像坐标中的点 的坐标由下式给出
的坐标由下式给出
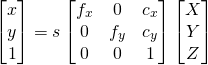
其中, 和
和 是在x和y方向上的焦距,并且
是在x和y方向上的焦距,并且 是光学中心。
是光学中心。
 是一个未知的比例因子,因为在任何图像中我们都不知道深度。我们将矩阵[X,Y,Z]代入以上矩阵。
是一个未知的比例因子,因为在任何图像中我们都不知道深度。我们将矩阵[X,Y,Z]代入以上矩阵。
是不是看起来有点复杂?这里使用一种称为直接线性变换(DLT)的方法,可以解决上述形式的等式。
但DLT方法不是非常准确。首先,旋转具有三个自由度,但DLT解决方案中使用的矩阵表示具有9个数字。DLT解决方案中没有任何内容迫使估计的3×3矩阵成为旋转矩阵。更重要的是,DLT解决方案不会最小化正确的目标函数。
Levenberg-Marquardt优化
莱文贝格-马夸特方法(Levenberg–Marquardt algorithm)能提供数非线性最小化(局部最小)的数值解。此算法能借由执行时修改参数达到结合高斯-牛顿算法以及梯度下降法的优点,并对两者之不足作改善(比如高斯-牛顿算法之反矩阵不存在或是初始值离局部极小值太远)。
假设 是一个从 的非线性映射,也就是说 且, 那么,
我们希望任意给定一个 以及合理的初始值 ,我们能找到一个 ,使得 尽量小(局部极小),其中。
我们通过迭代实现最小化,首先根据泰勒展开式我们能把 写为下面的近似,这有两个好处:
第一是线性的、第二是只需要一阶微分。
其中是的雅克比矩阵。对于每次的迭代我们实际上做了这样一件事:
假设这次 iteration 的点是,我们要找到一个 让 最小。 根据投影公式我们知道当下面式子被满足的时候能有最小误差:
我们将这个公式略加修改得到:
如此一来 大的时候这种算法会接近最速下降法,小的时候会接近高斯-牛顿方法。为了确保每次 长度的减少,我们这么作:先采用一个小的 ,如果 长度变大就增加。
此算法当以下某些条件达到时结束迭代:
- 如果发现 长度变化小于特定的给定值就结束。
- 发现 变化小于特定的给定值就结束。
- 到达了迭代的上限设定就结束。
在下一节中,我们将讨论如何将旋转向量、欧拉角与四元数之间进行转换。
引用:
1.https://www.cnblogs.com/warmlayu/p/9937067.html
3.https://en.wikipedia.org/wiki/Levenberg%E2%80%93Marquardt_algorithm
4.https://www.learnopencv.com/head-pose-estimation-using-opencv-and-dlib/