Directx11教程三十八之Pick(拾取技术)
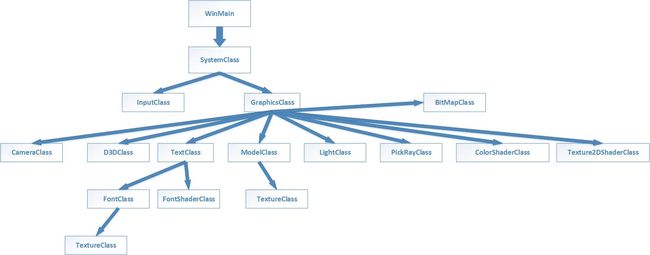
这节教程是关于Pick(拾取技术的),程序的结构如下:
在看这节教程前先弄懂:(1)大概了解D3D11的渲染流水线
(2) D3D11教程三十七之FrustumCulling(视截体裁剪)上半节教程, 弄不懂也没关系,两节教程之间有一些联系,但是由于我们的教程简化模型,就算看不懂D3D11教程三十七之FrustumCulling(视截体裁剪)上半节教程也不影响这节教程的理解。
一,Pick技术的简介。
Pick技术简单的来描述,其实就是在一个编辑器或者3D程序界面中,通过鼠标的点击来选取一个3D物体。我这里拿出虚幻四游戏引擎来做示例,看下面图:
上面就是大名鼎鼎的虚幻四游戏引擎的编辑界面了,里面高亮的石头就是通过点击鼠标来选取的,下面我就讲解一下这种拾取技术的原理。
二,Pick技术的原理。
我们在界面通过鼠标点击,具体的点击3D物体的过程如下面所示:在相机空间发出以相机原点发出的射线与位于相机空间的3D物体相交(本节教程的3D物体为球体)
由于此时鼠标是位于Win32屏幕空间的,一般情况上(有时间不一定,仅仅是一般情况下)win32屏幕空间的左上角为原点,为二维坐标, 如下面图所示:
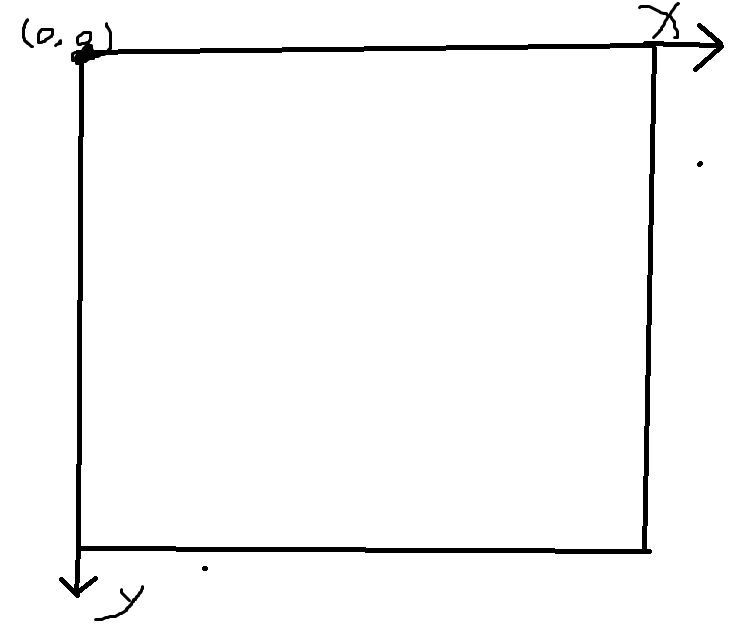
假设屏幕宽为ScreenWidth,高为ScreenHieght, 则鼠标点击在win32窗口坐标空间的坐标为(x,y),则x和y的范围是:
0=


从3D渲染管线图 我们大概知道:顶点从相机空间到win32窗口坐标空间有三次变换
一,透视投影变换,即乘以透视投影矩阵,(这一步发生在相机空间)
二,透视除法,除以w(这一步发生在齐次裁剪空间)
三,视口变换,即乘以视口变换矩阵(这一步发生在NDC空间)
所以我们想让顶点坐标从win32坐标空间变换到相机空间,得逆过来计算
一,从win32坐标空间(屏幕空间)变换到NDC坐标
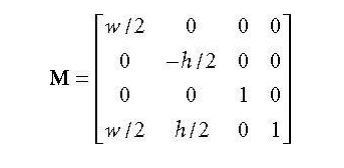
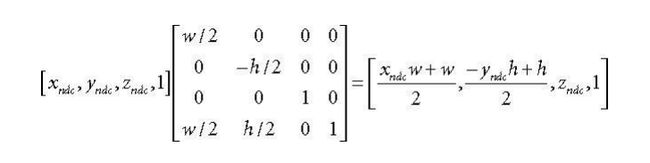
在NDC空间的顶点乘以视口变换矩阵变换到屏幕空间,所以先来看看视口变换矩阵,
看上面, 窗口的宽度为Width,窗口高度为Height,TopLeftX为窗口左上角顶点X值,TopLeftY为窗口左上角顶点Y值,MaxDepth为深度缓存的最大值,MinDepth为深度缓存的最小值,我们上面说过,一般情况下win32坐标空间的左手角为原点(0,0),所以TopLeftX=0,TopLeftY=0,而一般情况 MaxDepth=1.0, MinDepth=0.0,因此视口变换矩阵可以简化为:
假设在NDC空间的坐标为(
xndc,
yndc,
zndc,1.0f),注意在NDC空间中 -1=<
xndc<=1, -1=<
yndc,<=1, 0=<
zndc=1,详情请见上面的D3D11渲染管线图.
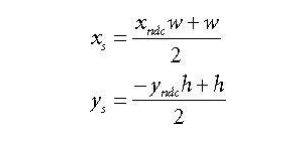
从NDC空间变换到屏幕空间如下面所示:
假设屏幕空间上的顶点坐标为
(
x
s,
y
s),则满足下面的关系式子:
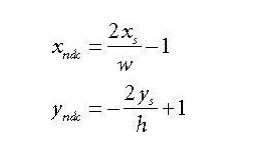
我们上面说过得逆过来计算,也就是由屏幕空间的顶点坐标
(
x
s,
y
s),得到NDC空间的顶点坐标得到(
xndc,
yndc,
zndc,1.0f),如下面所示:
公式(1)
我们同学可能还有疑问?
zndc为什么呢?其实很简单,我们说过0.0=
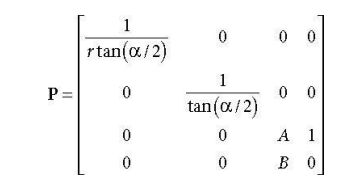
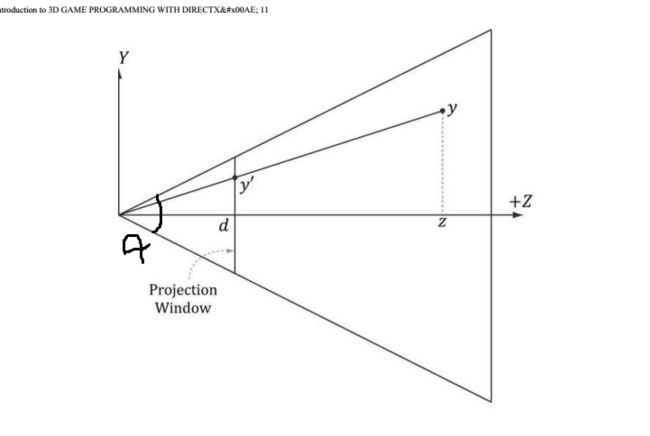
上面这里A和B的引进仅仅是为了方便表示而已, 其中A=f/(f-n) B=-nf/(f-n), 而上面我们假设过相机空间的近截面为Z=n, 远截面为Z=f, 而 r为屏幕的宽高比,
α为视截体在YZ平面投影的FOV角大小,如下面所示:


注意这两个函数的使用:
XMVector3TransformNormal变换XMVECTOR时,变换XMVECTOR时,把向量的第四个分量W看作为0.0,也就是真正的向量。

跟上面计算局部空间的射线那段代码一起放在一个函数:

这样顶点就从屏幕空间变换到NDC空间了
二,从NDC坐标变换到齐次裁剪空间。
在齐次裁剪空间的顶点进行透视除法变换到NDC空间,在齐次裁剪空间中坐标为( Xh, Yh, Zh, Wh), 注意 - Wh=< Xh<= Wh, - Wh=< Yh<= Wh, 0=< Zh<= Wh.
透视除法过程为:
xndc=
Xh/
Wh;
yndc=
Yh/
Wh;
zndc=
Zh/
Wh;
wndc=1.0=
Wh/
Wh;
那么
Wh是什么呢?
Wh为相机空间的顶点坐标的Z值,详情见上面的D3D11渲染管线图。而在我们的Pick技术里,点击的顶点恰恰是屏幕上的顶点,并且屏幕空间恰恰是相机空间的近截面,所以
Wh=n,( 这里假设Z=n为相机空间的近截面,Z=f为相机空间的远截面),。
即 透视除法具体过程为
xndc=
Xh/
n;
yndc=
Yh/
n;
zndc=
Zh/
n;
wndc=1.0=
n/
n;
逆过来求就是:
Xh=Xndc*n; Yh=Yndc*n; Zh=Zndc*n=0*n=0; Wn=Wndc*n=1.0*n=n;
联立公式1:
Xndc=2*Xs/w-1 Yndc=-2*Ys/h+1
可得:
Xh=(2*Xs/w-1)*n Yh=(-2*Ys/h+1)*n Zh=0 Wh=n
公式(2)
三,从齐次裁剪空间到相机空间。
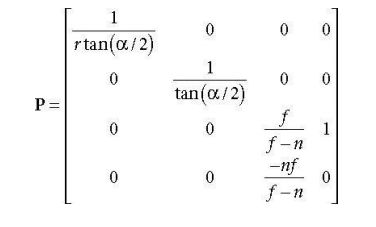
在相机空间的顶点乘以透视投影矩阵变换到齐次裁剪空间,所以先来看看D3D11的透视投影矩阵
也就是
我们顶点(Xv,Yv,Zv,1.0f);从相机空间乘以透视投影矩阵而变换到齐次裁剪空间,用下面公式表示:
那么由齐次裁剪空间顶点坐标(
Xh,
Yh,
Zh,
Wh)算出相机空间的(Xv,Yv,Zv,1.0f),由上面可以知道
Xh=Xv/(r*tan(α/2))
Yh=Yv/tan(α/2)
Zh=Zv*A+B
Wh=Zv
逆过来求则得到:
Xv=Xh*(r*tan(α/2))
Yv=Yh*tan(α/2)
Zv=(Zh-B)/A
Wv=1.0f;
联立上面的公式3,Xh=(2*Xs/w-1)*n Yh=(-2*Ys/h+1)*n Zh=0 Wh=n
得到
Xv={(2*Xs/w-1)*n }*{(r*tan(
α
/
2
))}={(2*Xs/w-1)*n }/{(1/(r*tan(α/2)))}
Yv=Yh*tan(α/2)={(-2*Ys/h+1)*n}/{1/(tan(α/2))}
Zv=-B/A={nf/(f-n)}/{f/(n-f)}=n
Wv=1.0f
当然我们求出相机空间再近截面的点并不需要直接用到r, α这两个变量,我们可以直接借用透视投影矩阵,假设透视投影矩阵为ProjMa,
则ProjMa11=1/(r*tan(α/2)), ProjMa22=tan(α/2),注意这里下标从1开始,而非0开始
最后得到
Xv={(2*Xs/w-1)*n }/ProjMa11;
Yv={(-2*Ys/h+1)*n}/ProjMa22;
Zv=n
Wv=1.0f
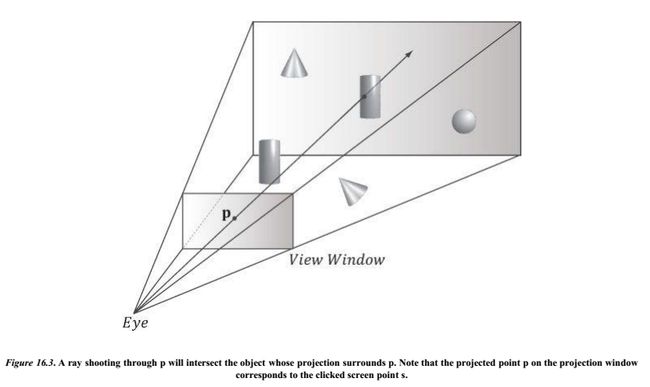
这次再次放出前面已经出现过一次的一张图:
上面P点在屏幕空间坐标就是(Xs,Ys),在相机空间坐标就是(Xv,Yv,Zv,1.0f),射线AB是从点Eye出发经过P点的射线,在相机空间中点Eye(相机)处在原点(0,0,0,1.0f)
射线向量为P-Eye=(
{(2*Xs/w-1)*n }/
ProjMa11,{(-2*Ys/h+1)*n}/ProjMa22,n,0);
把公约数n除掉,得到射线向量 (
(2*Xs/w-1) /
ProjMa11,(-2*Ys/h+1)/ProjMa22,1.0f,0);
最终相机空间的射线用两个量表示:
射线原点RayOrigin(0,0,0,1.0f)
射线向量 ((2*Xs/w-1) /ProjMa11,(-2*Ys/h+1)/ProjMa22,1.0f,0)
所以说关于这的推导有些地方不太对的
计算相机空间的射线代码如下:
bool PickRayClass::Frame(int mouseX, int mouseY)
{
//计算在相机空间的射线
float vx = (2.0f*(float)mouseX / mScreenWidth - 1.0f) / mProjMatrix._11;
float vy = (-2.0f*(float)mouseY / mScreenHeight + 1.0f) / mProjMatrix._22;
mViewSpaceRayOrigin = XMFLOAT4(0.0f, 0.0f, 0.0f, 1.0f);
mViewSpaceRayDir = XMFLOAT3(vx, vy, 1.0f); //是单位向量?
return true;
}
从上面我们计算出了相机空间的射线,但是我们为了方便的计算球体和射线的相交以及某些其它原因(限于篇幅,不讲了),我们直接将射线从相机空间直接变换到球体的局部空间
代码如下:
XMMATRIX ViewMatrix, InvViewMatrix,WorldMatrix,InvWorldMatrix;
XMVECTOR mLocalSpaceRayOrigin;
XMVECTOR mLocalSpaceRayRayDir;
//更新相机矩阵
mCamera->Render();
//获取相机矩阵和世界矩阵
ViewMatrix = mCamera->GetViewMatrix();
WorldMatrix = mD3D->GetWorldMatrix()*XMMatrixTranslation(SpherePosX, SpherePosY, SpherePosZ);
//获取相机矩阵的逆矩阵和世界矩阵的逆矩阵
InvViewMatrix = XMMatrixInverse(&XMMatrixDeterminant(ViewMatrix), ViewMatrix);
InvWorldMatrix = XMMatrixInverse(&XMMatrixDeterminant(WorldMatrix), WorldMatrix);
//将相机矩阵的逆矩阵与世界矩阵的逆矩阵相乘,得注意相机逆矩阵在前,世界逆矩阵在后
XMMATRIX InvMa = XMMatrixMultiply(InvViewMatrix, InvWorldMatrix);
//将射线的原点和方向向量从相机空间变到局部空间,局部空间物体的中心为(0.0f,0.0f,0.0f)
mLocalSpaceRayOrigin = XMVector3TransformCoord(ViewSpaceRayOrigin,InvMa);
mLocalSpaceRayRayDir = XMVector3TransformNormal(ViewSpaceRayDir, InvMa);
mLocalSpaceRayRayDir = XMVector3Normalize(mLocalSpaceRayRayDir);XMVector3TransformNormal变换XMVECTOR时,变换XMVECTOR时,把向量的第四个分量W看作为0.0,也就是真正的向量。
XMVector3TransformCoord变换XMVECTOR时, 变换XMVECTOR时,把向量的第四个分量W看作为1.0,也就是真正的点。
三,计算球体和射线的相交.
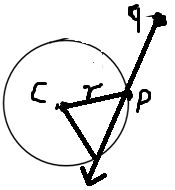
假设球体和射线处于同一个空间,q为射线的原点,u为射线的射线向量,则射线上面的点可以用
r(t)=q+t*u 表示,注意t为标量
假设C点为球体的圆心,r为球体的半径:
假设射线与球体相交,交点为P,如图所示:
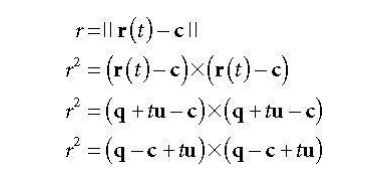
我们知道射线与球的交点P位于球上,P到球心C的距离为半径r, 则得出等式:
而P是射线上的点,P=r(t)=
q+t*u, t为某个实数
令
m=q-c,则
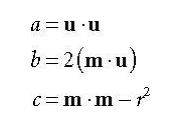
我们又回到了初中时代的一元二次方程式的求解问题,下面得到各个系数:
我们拿出初中方程的判定解数量的方程式:
△=b*b-4*a*c
(1)如果△=0 则线段和球体有且仅有一个交点
(2) 如果△<0,则线段和球体无交点
(3) 如果△>0,则线段和球体有两个不同的交点
所以当△>=0时,我们的线段和球体就存在交点,其实我想过一个问题,存在射线反向与球体相交,而射线正向不与球体相交的情况,毕竟线段和射线是有区别的,这个留给读者思考,我们在本节教程就假设△>=0时,射线和球体相交。
代码实现(球体球心坐标和射线必须在同一个空间,我的实例代码是在物体球体的局部空间的):
float a, b, c,discriminant; //二次方程式系数和判别式
XMFLOAT3 m;
XMFLOAT3 dir;
XMStoreFloat3(&m, mLocalSpaceRayOrigin);
XMStoreFloat3(&dir, mLocalSpaceRayRayDir);
a = dir.x*dir.x + dir.y*dir.y + dir.z*dir.z; //a>0 二次系数为正
b = 2 * (m.x*dir.x + m.y*dir.y + m.z*dir.z);
c = (m.x*m.x + m.y*m.y + m.z*m.z)-radius*radius;
discriminant = b*b - 4 * a*c;跟上面计算局部空间的射线那段代码一起放在一个函数:
bool GraphicsClass::TestIntersection(FXMVECTOR ViewSpaceRayOrigin, FXMVECTOR ViewSpaceRayDir, float SpherePosX, float SpherePosY, float SpherePosZ, float radius)
{
XMMATRIX ViewMatrix, InvViewMatrix,WorldMatrix,InvWorldMatrix;
XMVECTOR mLocalSpaceRayOrigin;
XMVECTOR mLocalSpaceRayRayDir;
//更新相机矩阵
mCamera->Render();
//获取相机矩阵和世界矩阵
ViewMatrix = mCamera->GetViewMatrix();
WorldMatrix = mD3D->GetWorldMatrix()*XMMatrixTranslation(SpherePosX, SpherePosY, SpherePosZ);
//获取相机矩阵的逆矩阵和世界矩阵的逆矩阵
InvViewMatrix = XMMatrixInverse(&XMMatrixDeterminant(ViewMatrix), ViewMatrix);
InvWorldMatrix = XMMatrixInverse(&XMMatrixDeterminant(WorldMatrix), WorldMatrix);
//将相机矩阵的逆矩阵与世界矩阵的逆矩阵相乘,得注意相机逆矩阵在前,世界逆矩阵在后
XMMATRIX InvMa = XMMatrixMultiply(InvViewMatrix, InvWorldMatrix);
//将射线的原点和方向向量从相机空间变到局部空间,局部空间物体的中心为(0.0f,0.0f,0.0f)
mLocalSpaceRayOrigin = XMVector3TransformCoord(ViewSpaceRayOrigin,InvMa);
mLocalSpaceRayRayDir = XMVector3TransformNormal(ViewSpaceRayDir, InvMa);
mLocalSpaceRayRayDir = XMVector3Normalize(mLocalSpaceRayRayDir);
//下面计算世界空间,射线是否与球体相交
float a, b, c,discriminant; //二次方程式系数和判别式
XMFLOAT3 m;
XMFLOAT3 dir;
XMStoreFloat3(&m, mLocalSpaceRayOrigin);
XMStoreFloat3(&dir, mLocalSpaceRayRayDir);
a = dir.x*dir.x + dir.y*dir.y + dir.z*dir.z; //a>0 二次系数为正
b = 2 * (m.x*dir.x + m.y*dir.y + m.z*dir.z);
c = (m.x*m.x + m.y*m.y + m.z*m.z)-radius*radius;
discriminant = b*b - 4 * a*c;
if (discriminant >= 0) //至少一个交点
{
return true;
}
else
{
return false;
}
}
放出程序运行图:
点取(Pick)球体失败:
点取(Pick)球体成功:
最后放出我的源代码链接:
http://download.csdn.net/detail/qq_29523119/9684011