C++实现rviz 2D Pose Estimate 功能设置机器人初始坐标
1. 首先查看设置初始坐标的话题 为 /intialpose ,查看消息类型和格式从而决定怎么给它发数据
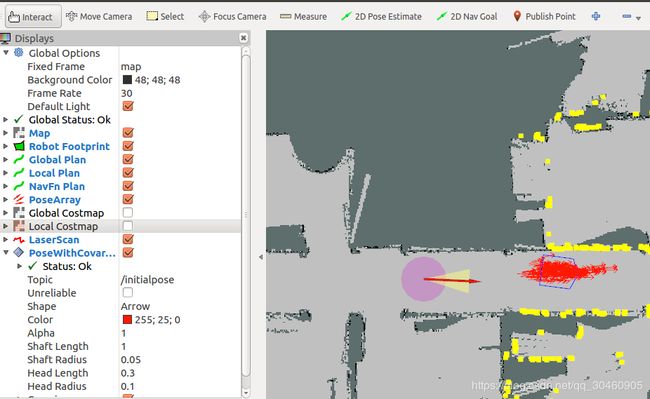
(1)首先打开一个可以自动导航的项目文件,打开rviz,点击2D Pose Estimate 进行初始位姿矫正 ,查看/initialpose消息格式:
sun@sun-pc:~$ rostopic info /initialpose
Type: geometry_msgs/PoseWithCovarianceStamped
Publishers:
* /rviz (http://sun-pc:40347/)
Subscribers:
* /amcl (http://sun-pc:35701/)(2)然后查看消息数据格式
sun@sun-pc:~$ rosmsg show geometry_msgs/PoseWithCovarianceStamped
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
2.监听rviz发出的数据格式
sun@sun-pc:~$ rostopic echo /initialpose
WARNING: no messages received and simulated time is active.
Is /clock being published?
header:
seq: 2
stamp:
secs: 825
nsecs: 700000000
frame_id: "map"
pose:
pose:
position:
x: 39.8066101074
y: 41.3922195435
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.0116650747515
w: 0.999931960701
covariance: [ 0.25, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.25, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.06853891945200942]
---
3.仿照rviz消息格式
position:为坐标信息,对2d来说只有x和y值。
orientation为四元数格式,参考相关链接:四元数与欧拉角之间的转换
对2d平面的移动机器人感官上易于理解的就是朝向信息,即欧拉角中绕z轴旋转的偏航角。
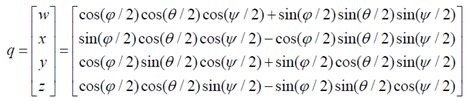
俯仰角和滚转角为0,故x和y均为0,即只有w和z值。
若偏行角为alpha,则w = cos(alpha/2),z = sin(alpha/2)。
4.编写发布节点程序
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "geometry_msgs/PoseWithCovarianceStamped.h"
#include "math.h"
#define PI 3.1415926
int main(int argc, char **argv)
{
ros::init(argc, argv, "pose_estimate_2d");
ros::NodeHandle nh;
ros::Publisher initial_pose_pub = nh.advertise("initialpose", 10);
ros::Rate loop_rate(1);
//define 2d estimate pose
double alpha = PI/2;//radian value
double x_pos = 43.0231246948;
double y_pos = 41.5323944092;
while (ros::ok())
{
geometry_msgs::PoseWithCovarianceStamped pose_msg;
pose_msg.header.stamp = ros::Time::now();
pose_msg.header.frame_id = "map";
pose_msg.pose.pose.position.x = x_pos;
pose_msg.pose.pose.position.y = y_pos;
pose_msg.pose.covariance[0] = 0.25;
pose_msg.pose.covariance[6 * 1 + 1] = 0.25;
pose_msg.pose.covariance[6 * 5 + 5] = 0.06853891945200942;
pose_msg.pose.pose.orientation.z = sin(alpha/2);
pose_msg.pose.pose.orientation.w = cos(alpha/2);
initial_pose_pub.publish(pose_msg);
ROS_INFO("Setting to :(%f,%f)",x_pos,y_pos);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
欢迎留言交流~