WGAN的实现代码(pytorch版)
WGAN的实现方法
推荐阅读知乎上“令人拍案叫绝的Wasserstein GAN 及代码”一文。
链接:https://zhuanlan.zhihu.com/p/25071913
代码来源:https://github.com/eriklindernoren/Keras-GAN
此处仅为笔者个人的一些理解和笔记。
一、GAN存在的问题
1、原始的GAN训练困难。需要很小心地平衡生成器和判别器的训练程度,如果判别器过强,会导致生成器梯度消失严重,难以进化,进而大大增加训练所需时间。
2、生成器和判别器的loss无法指示进程,也就是说,我们无法通过生成器与判别器的loss来判断我们生成的图像是否到达了我们所满意的情况。只能通过显示训练图像自行感受训练程度。
3、生成样本缺乏多样性。容易产生模型崩坏,即生成的图像中有着大量的重复图像。
二、WGAN的优点所在
1、彻底解决GAN训练不稳定的问题,不再需要小心平衡生成器和判别器的训练程度。
2、基本解决了collapse mode的问题,确保了生成样本的多样性 。
3、训练过程中终于有一个像交叉熵、准确率这样的数值来指示训练的进程,这个数值越小代表GAN训练得越好,代表生成器产生的图像质量越高。
4、以上一切好处不需要精心设计的网络架构,最简单的多层全连接网络就可以做到。(DCGAN依靠的是对判别器和生成器的架构进行实验枚举,最终找到一组比较好的网络架构设置)
三、改进流程
1、判别器最后一层去掉sigmoid。sigmoid函数容易出现梯度消失的情况。
2、生成器和判别器的loss不取log
3、每次更新判别器的参数之后把它们的绝对值截断到不超过一个固定常数c
4、不要用基于动量的优化算法(包括momentum和Adam),推荐RMSProp,SGD也行
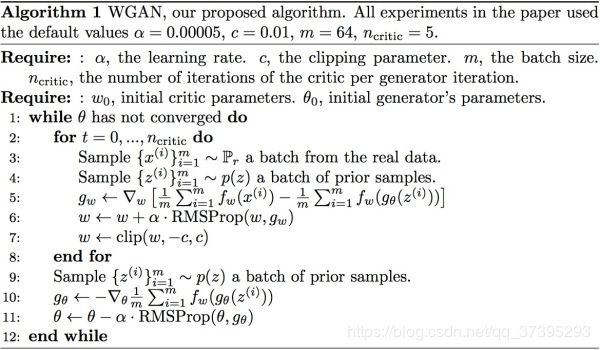
算法流程如下
四、代码实现(pytorch)
代码添加了一些便于理解的注释
import argparse
import os
import numpy as np
import math
import sys
import torchvision.transforms as transforms
from torchvision.utils import save_image
from torch.utils.data import DataLoader
from torchvision import datasets
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
import torch
os.makedirs("images", exist_ok=True)#方法是递归目录创建功能。如果exists_ok为False(默认值),则如果目标目录已存在,则引发OSError错误,True则不会
parser = argparse.ArgumentParser()
parser.add_argument("--n_epochs", type=int, default=200, help="number of epochs of training")
parser.add_argument("--batch_size", type=int, default=64, help="size of the batches")
parser.add_argument("--lr", type=float, default=0.00005, help="learning rate")
parser.add_argument("--n_cpu", type=int, default=8, help="number of cpu threads to use during batch generation")
parser.add_argument("--latent_dim", type=int, default=100, help="dimensionality of the latent space")
parser.add_argument("--img_size", type=int, default=28, help="size of each image dimension")
parser.add_argument("--channels", type=int, default=1, help="number of image channels")
parser.add_argument("--n_critic", type=int, default=5, help="number of training steps for discriminator per iter")
parser.add_argument("--clip_value", type=float, default=0.01, help="lower and upper clip value for disc. weights")
parser.add_argument("--sample_interval", type=int, default=400, help="interval betwen image samples")
opt = parser.parse_args()
print(opt)
img_shape = (opt.channels, opt.img_size, opt.img_size)
cuda = True if torch.cuda.is_available() else False
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
def block(in_feat, out_feat, normalize=True):
layers = [nn.Linear(in_feat, out_feat)]
if normalize:
layers.append(nn.BatchNorm1d(out_feat, 0.8))
layers.append(nn.LeakyReLU(0.2, inplace=True))
return layers
self.model = nn.Sequential(
*block(opt.latent_dim, 128, normalize=False),
*block(128, 256),
*block(256, 512),
*block(512, 1024),
nn.Linear(1024, int(np.prod(img_shape))),
nn.Tanh()
)
def forward(self, z):
img = self.model(z)
img = img.view(img.shape[0], *img_shape)
return img
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.model = nn.Sequential(
nn.Linear(int(np.prod(img_shape)), 512),#np.prod(img_shape)连乘操作,长*宽*深度
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(512, 256),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(256, 1),#改进1、判别器最后一层去掉sigmoid。sigmoid函数容易出现梯度消失的情况。
)
def forward(self, img):
img_flat = img.view(img.shape[0], -1)
validity = self.model(img_flat)
return validity
# Initialize generator and discriminator
generator = Generator()
discriminator = Discriminator()
if cuda:
generator.cuda()
discriminator.cuda()
# Configure data loader
os.makedirs("../../data/mnist", exist_ok=True)
dataloader = torch.utils.data.DataLoader(
datasets.MNIST(
"../../data/mnist",
train=True,
download=True,
transform=transforms.Compose([transforms.ToTensor(), transforms.Normalize([0.5], [0.5])]),
),
batch_size=opt.batch_size,
shuffle=True,
)
# Optimizers
optimizer_G = torch.optim.RMSprop(generator.parameters(), lr=opt.lr)#改进4、不要用基于动量的优化算法(包括momentum和Adam),推荐RMSProp,SGD也行
optimizer_D = torch.optim.RMSprop(discriminator.parameters(), lr=opt.lr)
Tensor = torch.cuda.FloatTensor if cuda else torch.FloatTensor
# ----------
# Training
# ----------
batches_done = 0
for epoch in range(opt.n_epochs):
for i, (imgs, _) in enumerate(dataloader):
# Configure input
real_imgs = Variable(imgs.type(Tensor))
# ---------------------
# Train Discriminator
# ---------------------
optimizer_D.zero_grad()
# Sample noise as generator input
z = Variable(Tensor(np.random.normal(0, 1, (imgs.shape[0], opt.latent_dim))))
# Generate a batch of images
fake_imgs = generator(z).detach()#detach 的意思是,这个数据和生成它的计算图“脱钩”了,即梯度传到它那个地方就停了,不再继续往前传播
#要少计算一次 generator 的所有参数的梯度,同时,也不必刻意保存一次计算图,占用不必要的内存。
# Adversarial loss
loss_D = -torch.mean(discriminator(real_imgs)) + torch.mean(discriminator(fake_imgs))#改进2、生成器和判别器的loss不取log
loss_D.backward()
optimizer_D.step()#只更新discriminator的参数
# Clip weights of discriminator
for p in discriminator.parameters():
p.data.clamp_(-opt.clip_value, opt.clip_value)
# Train the generator every n_critic iterations
if i % opt.n_critic == 0:
# -----------------
# Train Generator
# -----------------
optimizer_G.zero_grad()
# Generate a batch of images
gen_imgs = generator(z)
# Adversarial loss
loss_G = -torch.mean(discriminator(gen_imgs))
loss_G.backward()
optimizer_G.step()#只更新 generator 的参数
print(
"[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]"
% (epoch, opt.n_epochs, batches_done % len(dataloader), len(dataloader), loss_D.item(), loss_G.item())
)
if batches_done % opt.sample_interval == 0:
save_image(gen_imgs.data[:25], "images/%d.png" % batches_done, nrow=5, normalize=True)
batches_done += 1
注意此处
fake_imgs = generator(z).detach()要少计算一次 generator 的所有参数的梯度,同时,也不必刻意保存一次计算图,占用不必要的内存。
discriminator 比 generator 简单才使用此方案(通常也是如此)