基于PaddleHub的AI人脸侦测:不再用手打灰机(附代码)
项目实现:
用摄像头做人脸识别
判定头部角度,以此来进行游戏控制
所有代码和相关文件可在github中自取:
github: planegame_head_control
效果展示请见B站:
基于PaddleHub的AI人脸侦测:不再用手打灰机(附代码)
一、项目背景
随着AI技术的发展,越来越多的人脸技术被应用到了我们生活中的方方面面,刷脸支付、刷脸闸机通行、酒店人脸比对等场景都是人脸技术的应用 ,对人们的生活已经产生了巨大的影响。
而在这些技术当中,人脸关键点检测是最重要的基石之一,它是诸如自动人脸识别、表情分析、三维人脸重建及三维动画等其它人脸相关问题的前提和突破口。
PaddleHub 近期发布了人脸关键点检测模型face_landmark_localization,地址:
PaddleHub: face_landmark_localization
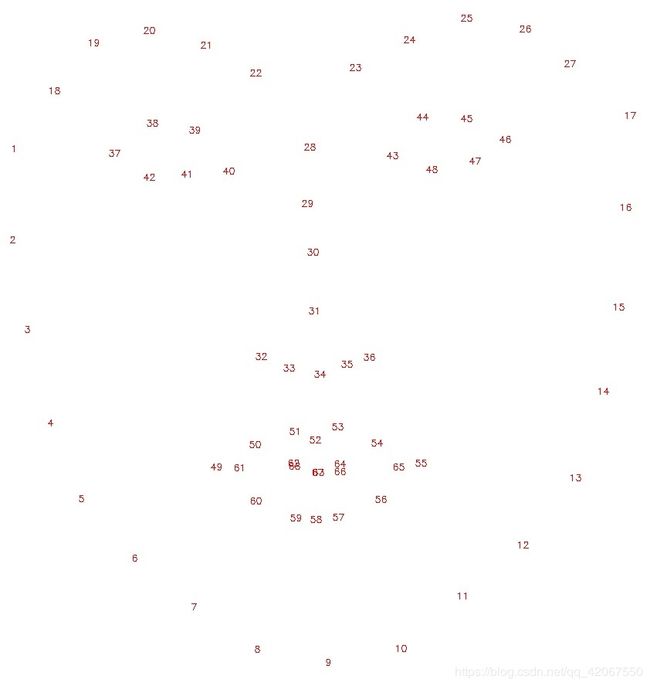
该模型转换自 face-landmark ,支持同一张图中的多个人脸检测。它可以识别人脸中的68个关键点,地址:
github: face-landmark
二、依赖环境
pip install paddlehub
pip install pygame
pip install opencv-python
三、关键程序
- 头部运动检测部分程序
import cv2
import numpy as np
import paddlehub as hub
from paddlehub.common.logger import logger
import time
import math
import os
class HeadPostEstimation(object):
"""
头部姿态识别
"""
NOD_ACTION = 1
SHAKE_ACTION = 2
def __init__(self, face_detector=None):
self.module = hub.Module(name="face_landmark_localization", face_detector_module=face_detector)
# 头部3D关键点坐标
self.model_points = np.array([
[6.825897, 6.760612, 4.402142],
[1.330353, 7.122144, 6.903745],
[-1.330353, 7.122144, 6.903745],
[-6.825897, 6.760612, 4.402142],
[5.311432, 5.485328, 3.987654],
[1.789930, 5.393625, 4.413414],
[-1.789930, 5.393625, 4.413414],
[-5.311432, 5.485328, 3.987654],
[2.005628, 1.409845, 6.165652],
[-2.005628, 1.409845, 6.165652],
[2.774015, -2.080775, 5.048531],
[-2.774015, -2.080775, 5.048531],
[0.000000, -3.116408, 6.097667],
[0.000000, -7.415691, 4.070434],
[-7.308957, 0.913869, 0.000000],
[7.308957, 0.913869, 0.000000],
[0.746313,0.348381,6.263227],
[0.000000,0.000000,6.763430],
[-0.746313,0.348381,6.263227],
], dtype='float')
# 点头动作index是0, 摇头动作index是1
# 当连续30帧上下点头动作幅度超过15度时,认为发生了点头动作
# 当连续30帧上下点头动作幅度超过45度时,认为发生了摇头动作,由于摇头动作较为敏感,故所需幅度更大
self._index_action = {0:'nod', 1:'shake'}
self._frame_window_size = 15
self._pose_threshold = {0: 15/180 * math.pi,
1: 45/180 * math.pi}
# 头部3D投影点
self.reprojectsrc = np.float32([
[10.0, 10.0, 10.0],
[10.0, 10.0, -10.0],
[10.0, -10.0, -10.0],
[10.0, -10.0, 10.0],
[-10.0, 10.0, 10.0],
[-10.0, 10.0, -10.0],
[-10.0, -10.0, -10.0],
[-10.0, -10.0, 10.0]])
# 头部3D投影点连线
self.line_pairs = [
[0, 1], [1, 2], [2, 3], [3, 0],
[4, 5], [5, 6], [6, 7], [7, 4],
[0, 4], [1, 5], [2, 6], [3, 7]
]
@property
def frame_window_size(self):
return self._frame_window_size
@frame_window_size.setter
def frame_window_size(self, value):
assert isinstance(value, int)
self._frame_window_size = value
@property
def pose_threshold(self):
return self._pose_threshold
@pose_threshold.setter
def pose_threshold(self, dict_value):
assert list(dict_value.keys()) == [0,1,2]
self._pose_threshold = dict_value
def get_face_landmark(self, image):
"""
预测人脸的68个关键点坐标
images(ndarray): 单张图片的像素数据
"""
try:
# 选择GPU运行,use_gpu=True,并且在运行整个教程代码之前设置CUDA_VISIBLE_DEVICES环境变量
res = self.module.keypoint_detection(images=[image], use_gpu=False)
return True, res[0]['data'][0]
except Exception as e:
logger.error("Get face landmark localization failed! Exception: %s " % e)
return False, None
def get_image_points_from_landmark(self, face_landmark):
"""
从face_landmark_localization的检测结果抽取姿态估计需要的点坐标
"""
image_points = np.array([
face_landmark[17], face_landmark[21],
face_landmark[22], face_landmark[26],
face_landmark[36], face_landmark[39],
face_landmark[42], face_landmark[45],
face_landmark[31], face_landmark[35],
face_landmark[48], face_landmark[54],
face_landmark[57], face_landmark[8],
face_landmark[14], face_landmark[2],
face_landmark[32], face_landmark[33],
face_landmark[34],
], dtype='float')
return image_points
def get_lips_distance(self,face_landmark):
"""
从face_landmark_localization的检测结果中查看上下嘴唇的距离
"""
lips_points = np.array([
face_landmark[52], face_landmark[58]
], dtype='float')
head_points = np.array([
face_landmark[25], face_landmark[8]
], dtype='float')
lips_distance = np.sum(np.square(lips_points[0] - lips_points[1]))
head_distance = np.sum(np.square(head_points[0] - head_points[1]))
relative_distance = lips_distance / head_distance
return relative_distance
def caculate_pose_vector(self, image_points):
"""
获取旋转向量和平移向量
"""
# 相机视角
center = (self.img_size[1]/2, self.img_size[0]/2) # 目前相机视角的中心点,即画面的长/2,宽/2
focal_length = center[0] / np.tan(60/ 2 * np.pi / 180)
camera_matrix = np.array([
[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]],
dtype = "float")
# 假设没有畸变
dist_coeffs = np.zeros((4,1))
success, rotation_vector, translation_vector= cv2.solvePnP(self.model_points,
image_points,
camera_matrix,
dist_coeffs)
reprojectdst, _ = cv2.projectPoints(self.reprojectsrc, rotation_vector, translation_vector, camera_matrix, dist_coeffs)
return success, rotation_vector, translation_vector, camera_matrix, dist_coeffs, reprojectdst
def caculate_euler_angle(self, rotation_vector, translation_vector):
"""
将旋转向量转换为欧拉角
"""
rvec_matrix = cv2.Rodrigues(rotation_vector)[0]
proj_matrix = np.hstack((rvec_matrix, translation_vector))
euler_angles = cv2.decomposeProjectionMatrix(proj_matrix)[6]
pitch, yaw, roll = [math.radians(_) for _ in euler_angles]
return pitch, yaw, roll
def classify_pose_in_euler_angles(self, video, poses=3):
"""
根据欧拉角分类头部姿态(点头nod/摇头shake)
video 表示不断产生图片的生成器
pose=1 表示识别点头动作
pose=2 表示识别摇头动作
pose=3 表示识别点头和摇头动作
"""
frames_euler = []
self.nod_time = self.totate_time = self.shake_time = time.time()
self.action_time = 0
index_action ={0:[self.NOD_ACTION], 1:[self.SHAKE_ACTION]}
for index, img in enumerate(video(), start=1):
self.img_size = img.shape
success, face_landmark = self.get_face_landmark(img)
for i, action in enumerate(index_action):
if i == 0:
index_action[action].append((20, int(self.img_size[0]/2 + 110)))
elif i == 1:
index_action[action].append((120, int(self.img_size[0]/2 + 110)))
if not success:
logger.info("Get face landmark localization failed! Please check your image!")
continue
image_points = self.get_image_points_from_landmark(face_landmark)
success, rotation_vector, translation_vector, camera_matrix, dist_coeffs, reprojectdst = self.caculate_pose_vector(image_points)
if not success:
logger.info("Get rotation and translation vectors failed!")
continue
# 计算嘴唇距离,如果张嘴,显示"open"
distance = self.get_lips_distance(face_landmark)
if distance > 0.045:
cv2.putText(img, "open", (20, int(self.img_size[0] / 2 + 90)),
cv2.FONT_HERSHEY_SIMPLEX,
0.75, (0, 0, 255), thickness=2)
# 画出投影正方体
alpha=0.3
if not hasattr(self, 'before'):
self.before = reprojectdst
else:
reprojectdst = alpha * self.before + (1-alpha)* reprojectdst
reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2)))
for start, end in self.line_pairs:
cv2.line(img, reprojectdst[start], reprojectdst[end], (0, 0, 255))
# 计算头部欧拉角
pitch, yaw, roll = self.caculate_euler_angle(rotation_vector, translation_vector)
cv2.putText(img, "pitch: " + "{:7.2f}".format(pitch), (20, int(self.img_size[0]/2 -10)), cv2.FONT_HERSHEY_SIMPLEX,
0.75, (0, 0, 255), thickness=2)
cv2.putText(img, "yaw: " + "{:7.2f}".format(yaw), (20, int(self.img_size[0]/2 + 30) ), cv2.FONT_HERSHEY_SIMPLEX,
0.75, (0, 0, 255), thickness=2)
cv2.putText(img, "roll: " + "{:7.2f}".format(roll), (20, int(self.img_size[0]/2 +70)), cv2.FONT_HERSHEY_SIMPLEX,
0.75, (0, 0, 255), thickness=2)
for index, action in enumerate(index_action):
cv2.putText(img, "{}".format(self._index_action[action]), index_action[action][1],
cv2.FONT_HERSHEY_SIMPLEX, 0.75, (50, 50, 50), thickness=2)
frames_euler.append([index, img, pitch, yaw, roll])
# 转换成摄像头可显示的格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
final_action = None
if len(frames_euler) > self.frame_window_size:
# 比较当前头部动作欧拉角与过去的欧拉角,只有动作幅度幅度超过阈值,则判定发生相应的动作
# picth值用来判断点头动作
# yaw值用来判断摇头动作
current = [pitch, yaw, roll]
tmp = [abs(pitch), abs(yaw)]
max_index = tmp.index(max(tmp))
max_probability_action = index_action[max_index][0]
for start_idx, start_img, p, y, r in frames_euler[0:int(self.frame_window_size/2)]:
start = [p, y, r]
if poses & max_probability_action and abs(start[max_index]-current[max_index]) >= self.pose_threshold[max_index]:
frames_euler = []
final_action = max_index
self.action_time = time.time()
yield {self._index_action[max_index]: [(start_idx, start_img), (index, img)]}
break
else:
# 丢弃过时的视频帧
frames_euler.pop(0)
# 动作判定发生则高亮显示0.5s
if self.action_time !=0 and time.time() - self.action_time < 0.5:
cv2.putText(img_rgb, "{}".format(self._index_action[max_index]), index_action[max_index][1],
cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), thickness=2)
# 本地显示预测视频框,AIStudio项目不支持显示视频框
cv2.imshow('Pose Estimation', img_rgb)
# 写入预测结果
video_writer.write(img_rgb)
class MyFaceDetector(object):
"""
自定义人脸检测器
基于PaddleHub人脸检测模型ultra_light_fast_generic_face_detector_1mb_640,加强稳定人脸检测框
"""
def __init__(self):
self.module = hub.Module(name="ultra_light_fast_generic_face_detector_1mb_640")
self.alpha = 0.75
self.start_flag =1
def face_detection(self,images, use_gpu=False, visualization=False):
# 使用GPU运行,use_gpu=True,并且在运行整个教程代码之前设置CUDA_VISIBLE_DEVICES环境变量
result = self.module.face_detection(images=images, use_gpu=use_gpu, visualization=visualization)
if not result[0]['data']:
return result
face = result[0]['data'][0]
if self.start_flag == 1:
self.left_s = result[0]['data'][0]['left']
self.right_s = result[0]['data'][0]['right']
self.top_s = result[0]['data'][0]['top']
self.bottom_s = result[0]['data'][0]['bottom']
self.start_flag=0
else:
# 加权平均上一帧和当前帧人脸检测框位置,以稳定人脸检测框
self.left_s = self.alpha * self.left_s + (1-self.alpha) * face['left']
self.right_s = self.alpha * self.right_s + (1-self.alpha) * face['right']
self.top_s = self.alpha * self.top_s + (1-self.alpha) * face['top']
self.bottom_s = self.alpha * self.bottom_s + (1-self.alpha) * face['bottom']
result[0]['data'][0]['left'] = self.left_s
result[0]['data'][0]['right'] = self.right_s
result[0]['data'][0]['top'] = self.top_s
result[0]['data'][0]['bottom'] = self.bottom_s
return result
# 定义人脸检测器
face_detector = MyFaceDetector()
# 打开摄像头
capture = cv2.VideoCapture(0)
# capture = cv2.VideoCapture('./test_sample.mov')
fps = capture.get(cv2.CAP_PROP_FPS)
size = (int(capture.get(cv2.CAP_PROP_FRAME_WIDTH)),
int(capture.get(cv2.CAP_PROP_FRAME_HEIGHT)))
# 将预测结果写成视频
video_writer = cv2.VideoWriter('result_enhancement.mp4', cv2.VideoWriter_fourcc(*'mp4v'), fps, size)
def generate_image():
while True:
# frame_rgb即视频的一帧数据
ret, frame_rgb = capture.read()
# 按q键即可退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
if frame_rgb is None:
break
frame_bgr = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2BGR)
yield frame_bgr
capture.release()
video_writer.release()
cv2.destroyAllWindows()
head_post = HeadPostEstimation(face_detector)
for res in head_post.classify_pose_in_euler_angles(video=generate_image, poses=HeadPostEstimation.NOD_ACTION | HeadPostEstimation.SHAKE_ACTION):
print(list(res.keys()))
四、控制方式
直接运行 main.py 即可
头部左转:飞机往左移动
头部右转:飞机往右移动
抬头:飞机前移动
低头:飞机向后移动
张嘴:丢炸弹!
五、说明
飞机的速度,子弹的速度都可以在参数中调节
为了演示方便,把之前游戏中的速度都上调了
另外,由于摄像头的镜像关系,头部左转和右转会与左右控制相反,希望调节为反过来的可以在参数里对调一下