经典算法(一):线性回归
前言
1. 基本形式
2. 损失函数
2.1 损失函数
2.1.1 最小二乘法
2.1.2 极大似然估计
2.2 正规方程法
2.2.1 一般形式
2.2.2 矩阵形式
2.3 梯度下降法
2.3.1 梯度下降法的代数方式描述
2.3.2 梯度下降法的矩阵方式描述
2.3.3 梯度下降的算法调优
2.3.4 梯度下降法的类型
3. 欠/过拟合
3.1 欠拟合
3.1.1 何为欠拟合?
3.1.2 解决方法
3.2 过拟合
3.2.1 何为过拟合?
3.2.2 解决方法
4. 正则化
4.1 L0范数
4.2 L1范数与Lasso
4.3 L2范数与Ridge
4.4 Elastic Net
4.5 L1为稀疏约束的原因
前言
线性回归模型是用一条曲线去拟合一个或多个自变量 x 与因变量 y 之间关系的模型,若曲线是一条直线或超平面(成直线时是一元线性回归,成超平面时是多元线性回归)时是线性回归,否则是非线性回归,常见的非线性回归有多项式回归和逻辑回归。线性回归是有监督学习,有标签(可以理解为样本有y值)。通过学习样本 学习映射
学习映射![]() ,得到预测的结果
,得到预测的结果![]() 是连续值变量,这是简单的一元线性回归模型,多元线性回归模型后面会详细讲(两者的异同可以参考博文)。线性回归是基础算法,同时是高级算法的根基,所以有必要掌握它的思想并学会融会贯通。接下来我们将详细学习该算法。
是连续值变量,这是简单的一元线性回归模型,多元线性回归模型后面会详细讲(两者的异同可以参考博文)。线性回归是基础算法,同时是高级算法的根基,所以有必要掌握它的思想并学会融会贯通。接下来我们将详细学习该算法。
1. 基本形式
预测函数一般表示式
![]()
令![]() =1,可以写成
=1,可以写成

向量表达式
![]()
2. 损失函数
2.1 损失函数
线性回归模型是用一条曲线去拟合x与y之间的关系,那拟合的效果的好坏如何去判定呢?这就是我们要提到的损失函数,每个算法的损失函数或许不一样,但我们的目的都是使得损失函数最小化,所以需要找到对应的权重θ使得损失函数最小。下面左图是一个权重下的损失函数图像,右图是两个权重下的损失函数,损失函数是凸函数,都有唯一的最小值点。


一般将线性回归的损失函数定义为:

下面的损失函数与该形式虽然形式不完全一样,但是含义一样。这里的 ![]() 是为了求导计算的便利,而
是为了求导计算的便利,而 ![]() 是将损失平均化,消除样本量m带来的影响。
是将损失平均化,消除样本量m带来的影响。
![]() 是预测值,但因为预测值与实际值之间还是存在一定的差距,如何去确定预测的效果的好坏,需要判定预测值
是预测值,但因为预测值与实际值之间还是存在一定的差距,如何去确定预测的效果的好坏,需要判定预测值![]() 与实际值
与实际值 之间的差距,这差距用误差
之间的差距,这差距用误差 来表示,即
来表示,即![]() 。至于损失函数
。至于损失函数 ![]() 为什么需要使用平方和?下面从最小二乘法和极大似然估计两个方面去分析。
为什么需要使用平方和?下面从最小二乘法和极大似然估计两个方面去分析。
2.1.1 最小二乘法
误差![]() 有正有负,如果直接对
有正有负,如果直接对![]() 求和,则会出现正负抵消的情况,反映不出整体误差情况。如果使用平方和,整体的误差分布不变,所以一般使用平方和做损失函数。
求和,则会出现正负抵消的情况,反映不出整体误差情况。如果使用平方和,整体的误差分布不变,所以一般使用平方和做损失函数。
线性模型用一条直线(平面)拟合数据点,找出一条最好的直线(平面)即要求每个真实点直线(平面)的距离最近。即使得残差平方和(RSS)最小

但由于每个样本的数据量存在较大的差异,为了消除样本量差异的影响,使用最小化均方误差(MSE)拟合

所以得到损失函数
式子中的 ![]() 是为了求导计算便利添加的。
是为了求导计算便利添加的。
2.1.2 极大似然估计
误差![]() 中,误差
中,误差![]() 是独立同分布的,并且服从均值为0方差为
是独立同分布的,并且服从均值为0方差为![]() 的高斯分布(也称为正态分布)。补充:正态分布的均值和方差取不同值,得到不同的分布图,但均值为0,方差为1的分布称为标准正态分布。
的高斯分布(也称为正态分布)。补充:正态分布的均值和方差取不同值,得到不同的分布图,但均值为0,方差为1的分布称为标准正态分布。
其中,高斯分布表达式为:
![]()
由于误差服从均值为0方差为![]() 的高斯分布,所以满足:
的高斯分布,所以满足:


于是得到:

该式子表示 和
和 结合后的值与
结合后的值与 接近的概率,即误差
接近的概率,即误差![]() 最小的概率,即概率越大,说明预测值与真实值越接近。
最小的概率,即概率越大,说明预测值与真实值越接近。
由于线性回归模型是一条直线(或超平面)拟合多个点,所以需要满足所有误差取得最小值,即所有概率的乘积最大化,符合似然函数:
上式中需要找到能使得概率连乘 最大化,也就是预测值与真实值无限接近。
最大化,也就是预测值与真实值无限接近。
由于连乘难解,所以需要转化成加法,取对数得:


上面的式子中,第一项是确定值,而第二项是变动值,所以要使得![]() 最大,即要使得
最大,即要使得![]() 最小化,于是得到损失函数
最小化,于是得到损失函数

同理,消除样本量m带来的影响, 将损失平均化,乘以一个 ![]() 。
。
2.2 正规方程法
正规方程法有一般形式和矩阵形式。
2.2.1 一般形式
简单一元线性回归模型为:
![]()
那么,损失函数如下:

损失函数是关于θ和b的凸函数,当它关于θ和b的导数均为零时,得到θ和b的最优解。
(关于凸函数:对区间[a,b]上定义的函数f,若它对区间中任意两点![]() 均有
均有![]() 则称 f 为区间[a,b]上的凸函数。U形曲线的函数如
则称 f 为区间[a,b]上的凸函数。U形曲线的函数如![]() 通常是凸函数。对实数集上的函数,可通过求二阶导数来判别:若二阶导数在区间上非负,则称为凸函数;若二阶导数在区间上恒大于0,则称为严格凸函数。)
通常是凸函数。对实数集上的函数,可通过求二阶导数来判别:若二阶导数在区间上非负,则称为凸函数;若二阶导数在区间上恒大于0,则称为严格凸函数。)
求解 和b使损失函数最小化,对求偏导
和b使损失函数最小化,对求偏导


令![]() ,则得到:
,则得到:

(注意:由于下面的计算过程会有双重前m项求和,避免混淆,最好将所有项,特别含b的项)
对b求偏导

令![]() ,则
,则

解得:
![]()
将(2)式带入(1)式,解得(求解过程可以参考最小二乘法求导)


于是,由求得的 和b就可以得到接近真实值的预测值以及拟合直线
和b就可以得到接近真实值的预测值以及拟合直线![]() .
.
以上是最小二乘法的一般形式解决简单的线性回归问题,如果对于复杂的多元线性回归,则使用最小二乘法的矩阵形式.
2.2.2 矩阵形式
多元线性回归是给定数据集 ,其中
,其中 ,
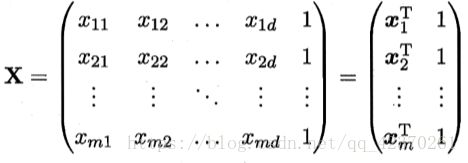
, 。简单的一元线性回归使用一般形式,而多元线性回归比较复杂,使用矩阵形式表示清晰。为了方便讨论,我们将w和b用向量形式表示
。简单的一元线性回归使用一般形式,而多元线性回归比较复杂,使用矩阵形式表示清晰。为了方便讨论,我们将w和b用向量形式表示 ![]() ,同样的,数据集D表示为一个m x (d+1)矩阵X ,即
,同样的,数据集D表示为一个m x (d+1)矩阵X ,即
将标记y也改为向量形式![]() ,表示样本到超平面的欧式距离之和为(与
,表示样本到超平面的欧式距离之和为(与 ![]() 类似)
类似)
可参考矩阵推导:
![]()
![]()
对 求导,其中当
求导,其中当 为满秩矩阵
为满秩矩阵
![]()
![]()
令![]() ,解得
,解得
![]()
令![]() ,则多元线性回归模型为
,则多元线性回归模型为
![]()
这个模型是在当为满秩矩阵的时候得到的,但现实任务中往往不是满秩矩阵。比如变量过多,出现变量多于记录数,即列数多于行数,则不是满秩矩阵,那么就会得到多个解θ(这就像解方程组,未知数x的个数大于方程数,则得不到唯一解)使均方误差最小,但是每个θ的重要性不一样,这就需要引入正则化项,下文会详细讲解。
2.3 梯度下降法
前面使用最小二乘法求出使得loss function最小化的参数,而实际问题中常使用梯度下降。首先,最小二乘法是通过平方损失函数建立模型优化目标函数的一种思路,求解最优模型过程便具体化为最优化目标函数的过程;而梯度下降法是最优化目标函数的一种优化算法,具体求解使得目标函数能达到最优或者近似最优的参数集。再者,实际问题中不是满秩矩阵,不可逆,最小二乘法无法解决,而梯度下降法可以。
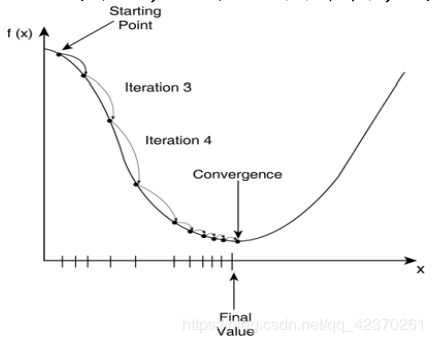
梯度下降是逐步最小化loss function的过程,如同下山,需要找准方向(斜率或梯度),每次迈进一小步(步长为 ),直到山底(参考下图理解)。梯度下降式子:
),直到山底(参考下图理解)。梯度下降式子: ![]()
2.3.1 梯度下降法的代数方式描述
损失函数的代数表达为:

将 ![]() 中的
中的  展开
展开

所以θ更新为 
对每个参数θ求偏导,将所有偏导数写成向量形式,即梯度。该梯度就此次是下降的方向,不断迭代,直到得到全局或局部最优解。
2.3.2 梯度下降法的矩阵方式描述
损失函数的向量表达式为:
![]()
同理,求导 ![]() 得
得
![]()
![]()
![]()
![]()
所以θ更新为:

梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
梯度下降法算法如下:
输入:目标函数![]() ,梯度函数g(x)=▽f(x),计算精度
,梯度函数g(x)=▽f(x),计算精度 ;
;
输出:![]() 的极小点
的极小点 .
.
(1)取初始值![]() ,置
,置![]()
(2)计算![]()
(3)计算梯度![]() ,当
,当![]() 时,停止迭代,令
时,停止迭代,令![]() ;否则,令
;否则,令![]() ,求
,求 ,使
,使![]()
(4)置![]() ,计算
,计算![]()
当![]() 或
或![]() 时,停止迭代,令
时,停止迭代,令![]()
(5)否则,置![]() ,转(3).
,转(3).
2.3.3 梯度下降的算法调优
在使用梯度下降算法时需要从以下几个方面进行调优:
(1)算法步长 的选择。
的选择。
步长的取值需要根据实际数据样本来决定,可以取一定范围的值来运行,观察损失函数的变化,如果损失函数变小,说明步长合适,否则需要将步长的范围进行调整重新运行。步长需要多次运行观察结果才能确定下来,步长太大迭代过快,可能会错过最优解;而步长太小则迭代太慢,需要时间太长都得不到最优解,所以需要多次运行调试才能找到合适的步长。
(2)算法参数的初始值选择。
初始值的不同,得到的最小值也不同,那么得到的就是局部最优解。如果损失函数是凸函数,则一定是最优解。由于梯度下降法可能得到局部最优解而不是全局最优解,所以需要取不同的初始值,然后选择损失函数最小的初始值。
(3)归一化
由于样本不同特征取值范围不一样,会造成迭代速度很慢,为了减少特征取值的影响,需要将数据特征归一化(即标准化)。公式为![]()
2.3.4 梯度下降法的类型(BGD、SBD、MBGD)
(1)批量梯度下降法
批量梯度下降法是最常用的一种,该方法在参数更新时使用了所有样本进行更新,前面提到的梯度下降法就是批量下降法。

这里样本数目为m,即使用了所有样本。
(2)随机梯度下降法
随机梯度下降法和批量梯度下降法原理类似,不同的是随机梯度下降法在更新参数的时候不是选用所有的m个样本,而是随机选取其中的第i个样本。
![]()
上面提到的两种梯度下降法,一个是使用所有样本数据进行梯度下降,另一个是随机选取一个样本进行梯度下降。从训练速度上看,随机梯度下降法只选取其中一个样本进行梯度下降,速度快;而批量梯度下降法是使用所有样本数据进行梯度下降,速度固然慢。但从准确性来看,随机梯度下降法仅仅使用一个样本来决定梯度方向,得到的解不一定是最优解;从收敛速度来看,由于随机梯度下降法是随机选取一个样本方向来决定梯度方向,使得每次参数更新时梯度方向变化较大,不能很快收敛到局部或者全局最优解。既然这两种方法都不完美,那下面我们介绍一种折中的下降法。
(3)小批量梯度下降法
小批量梯度下降法是在所有样本m中选取n个数据进行梯度下降,![]() ,n的取值根据样本量来决定。
,n的取值根据样本量来决定。

最小二乘法和梯度下降法都是无约束优化算法,但二者存在一定的区别。最小二乘法是计算解析解,适用于较小样本且存在解析解的数据,速度较快;梯度下降法是迭代求解,需要选择步长,适用于较大样本数据。如果较大样本数据使用最小二乘法,需要求一个大矩阵的逆矩阵,需要耗费时间较多,所以选择梯度下降法较好。
无约束优化算法除了上面提到的最小二乘法和梯度下降法,还有牛顿法和拟牛顿法,具体内容请参考无约束优化算法。
三、欠/过拟合
在机器学习模型中,主要任务是在规则化参数的同时最小化误差。最小化误差是为了让我们的模型拟合我们的训练数据,而规则化参数是防止我们的模型过分拟合我们的训练数据。虽然先用train数据训练模型,并尽量使得训练误差最小化,但训练误差最小化不是最终目的。因为模型的真正目的是预测新数据,所以更重要的目的是使得模型的测试误差小,也就是能准确的预测新的样本。
3.1欠拟合
3.1.1 何为欠拟合?
欠拟合就是模型没有很好地捕捉到数据特征,不能够很好地拟合数据。例如本来应该使用一条曲线才能拟合较好得拟合特征,而仅仅使用了一条直线去拟合,则是欠拟合。例如不认真学习数学的同学,平时只记几个公式,考试时答案大部分是不正确的,成绩不理想。
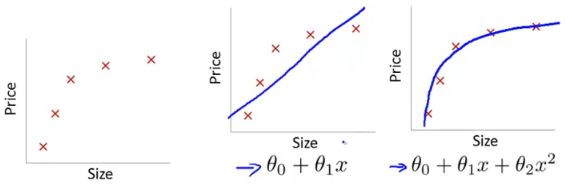
左图表示Size与Prize关系的数据,中间图是出现欠拟合的模型,不能够很好地拟合数据,如果在中间图的模型后面加一个二次项成曲线,就可以很好地拟合右图中的数据。
3.1.2 解决方法:
(1)添加特征。欠拟合是因为特征数不够,可以通过组合、泛化、相关性等得到新特征;
(2)添加多项式特征。在机器学习算法普遍使用该方法,如将线性模型通过添加二次项或者三次项使模型泛化能力更强;
(3)减少正则化参数。正则化的目的是用来防止过拟合的,但由于模型出现了欠拟合,则需要减少正则化参数。
3.2 过拟合
3.2.1 何为过拟合?
过拟合:过拟合就是模型把数据特征学习的太彻底,以至于把噪声数据的特征也学习了,这样就会导致在后期测试的时候不能够很好地识别测试数据,使得模型泛化能力太差。就像一位同学临近数学考试前将所有复习题目都背下来,但是考试题目即使类型一样,变量改变也不会解答,从而考试成绩还是不理想。

左图是欠拟合,而中间图则是拟合得很好,而右图则是过拟合。右图的曲线为了拟合每个特征甚至噪声,变成过度扭曲的曲线。
3.2.2 解决方法
(1)重新清洗数据。过拟合的一个原因是数据不纯,所以需要重新清洗数据;
(2)增大数据的训练量。过拟合的另一个原因是用于训练的数据量太小,训练数据占总数据的比例过小。
(3)采用正则化方法。正则化方法包括L0正则、L1正则和L2正则,也就是在目标函数后面加上对应的范数,具体知识下面详细讲解。
(4)采用dropout方法。这个方法在神经网络里面很常用。dropout方法是ImageNet中提出的一种方法,通俗一点讲就是dropout方法在训练的时候让神经元以一定的概率不工作。具体看下图:

四、正则化(regularization)
正则化主要是解决过拟合问题,下面对L0、L1和L2范数详细讲解。
4.1 L0范数
L0范数是指向量中非0的元素的个数。那么,在规则化权重矩阵w时,则希望非0元素尽量少,甚至不存在,起到稀疏化矩阵的作用。这比较极端,也是L0较少使用的一个原因。
4.2 L1范数与Lasso
L1范数是指向量中各个元素绝对值之和,可以使得权重矩阵w中的元素等于0,也称为“稀疏规则算子”。虽然L0范数和L1范数都可以实现稀疏性,但是因为L0范数不连续,很难优化求解(NP问题),而且L1范数是L0范数的最优凸近似,所以L1范数常被使用。
假设参数的先验分布是Laplace分布, L1范数的基本形式:
加入L1范数的线性回归为:

在原来有约束的最小化的loss问题中加入L1范数和拉格朗日乘子 ,变成无约束的最小化loss问题。
,变成无约束的最小化loss问题。

我们将L1范数称为loss函数的正则项,也是L1正则化,加入L1范数的线性回归称作LASSO。L1正则化会使不重要的特征的权重置为0,L1范数是稀疏约束,具体情况下面用图形解析。
L1范数使得参数稀疏主要作用有两方面:
(1)特征选择:实现特征的自动选择。实际问题中,特征都很多,且存在一些不相关或者包含不重要信息的特征。如果将所有特征都加入模型,则会使得模型求解速度慢。使用L1范数可以进行特征自动选择,主要是将与y不相关或含不重要信息的特征的权重等于0,可以达到去除这些特征,保留重要特征的效果。
(2)可解释性:去除不重要特征,留下少量的重要特征,解释性更强。
4.3 L2范数与Ridge
为了解决L1没有保留局部特征的问题,引入L2范数替代L1范数。L2范数使得权重矩阵w中的元素趋向于0,越小使得模型的复杂度降低。
L2范数是指向量各元素的平方和然后求平方根。可以使得W的每个元素都很小,都接近于0,但与L1范数不同,它不会让它等于0,而是接近于0。L2正则项有防止过拟合的作用,原因是它使得参数w变小加剧,且更小的参数值w意味着模型的复杂度更低,对训练数据的拟合刚刚好(奥卡姆剃刀),不会过分拟合训练数据,从而使得不会过拟合,以提高模型的泛化能力。
假设参数的先验分布是Gaussian 分布,L2范数的基本形式:
![]()
加入L2范数的线性回归

同样的,也引入拉格朗日乘子λ。

加入L2范数的线性回归称作Ridge,L2正则化会使重要性低的特征的权重无线靠近0,但是不为0,L2范数不是稀疏约束。
4.4 Elastic Net
Elastic Net 是一种使用L1和L2先验作为正则化矩阵的线性回归模型.这种组合用于只有很少的权重非零的稀疏模型。当多个特征和另一个特征相关的时候弹性网络非常有用。Lasso 倾向于随机选择其中一个,而弹性网络更倾向于选择两个。在实践中,Lasso 和 Ridge 之间权衡,它允许在循环过程中继承 Ridge 的稳定性。
Elastic Net在高度相关变量的情况下,会产生群体效应;选择变量的数目没有限制;可以承受双重收缩。
4.5 L1为稀疏约束的原因

根据上图,L1范数含绝对值,得到的是左图四边形;而L2范数含平方项,得到的是右图圆形。不同在于L1在和每个坐标轴相交的地方都有”角“出现,与目标函数相交的地方也是在角的位置。角的位置就容易产生稀疏性,例如图中的交点处w1=0。L2就没有这样的性质,因为没有角,相交的位置有稀疏性的概率就非常低,从直观上解释了为什么L1能够产生稀疏性而L2就不行。
本篇博文主要是线性回归模型的理论知识,关于线性回归算法的代码会在下一篇博文中展示。
参考资料:
1.梯度下降法:https://www.cnblogs.com/pinard/p/5970503.html
2.机器学习---周志华
3.矩阵求导:https://blog.csdn.net/nomadlx53/article/details/50849941