stm32新建工程及启动过程了解
新建工程简单流程
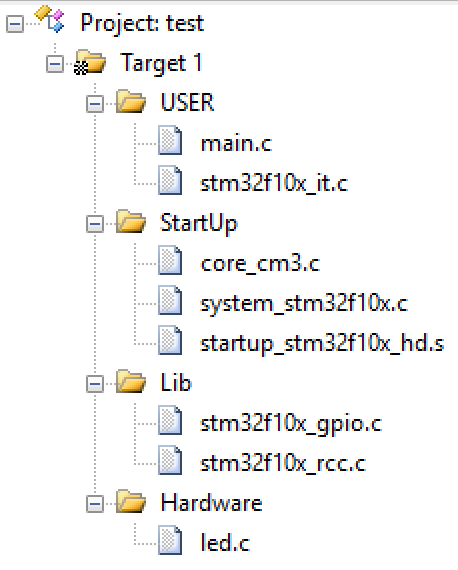
首先,新建文件夹存放总的工程,如test,在test下新建文件夹分类存放工程里的各个文件,我个人分类如下:StartUp、User、Lib、Hardware、Obj
分别存放stm32启动文件,用户文件、库文件、硬件驱动文件、生成目标文件
新建好了文件夹,再复制进相应的文件,Lib直接把全部库文件复制进去也没事,到时候要用哪个就加哪个到工程里,主要是StartUp和User
StartUp如下:

这些文件注意下载适合自己单片机的版本,如hd.s和md.s要分清。这些文件均与单片机启动时有关,文件的具体了解下面再讲,这里先讲流程
User如下:

main.c自不用多说,下面四个文件也留到后面介绍
由于最后得编译烧录看下现象,用到个led,可以在Hardware中添加
以下操作只是作为笔记记下,所以只是简单写下。
打开软件,new project 选择路径到User即可,且把输出路径改为刚才新建的Obj,点击![]() 右边这个图标,将工程目录添加文件,如下
右边这个图标,将工程目录添加文件,如下
led相应的端口控制用到gpio库,gpio库又依赖rcc库,因此lib里加入了这两个
点击左边这个图标,点击c/c++ 设置define和include paths,后者就是把所有用到的.h文件的路径全部选择进去
前者如下:STM32F10X_HD,USE_STDPERIPH_DRIVER 其中STM32F10X_HD指明当前设备的存储容量为hd版,USE_STDPERIPH_DRIVER如果要使用官方提供的库函数则需定义(stm32f10x_conf.h include了所有库文件,而stm32f10x.h最后有一句 )
)
然后在led和main都include "stm32f10x.h" 就可以开始写代码了,我随便写了点烧录下没什么问题
main的代码
![]()
#include "stm32f10x.h"
#include "led.h"
void delay(unsigned int cnt)
{
unsigned int i,j;
for(i=0;i
for(j=0;j<5000;j++);
}
int main()
{
LED_Init();
while(1)
{
GPIO_SetBits(GPIOA,GPIO_Pin_8);//PA8??
GPIO_ResetBits(GPIOD,GPIO_Pin_2);//PB2??
delay(1000);
GPIO_ResetBits(GPIOA,GPIO_Pin_8);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
delay(1000);
}
return 0;
}
![]()
led的代码
![]()
#include "led.h"
void LED_Init(void)
{
RCC->APB2ENR|=1<<2; //ʹÄÜPORTAʱÖÓ
RCC->APB2ENR|=1<<5; //ʹÄÜPORTDʱÖÓ
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;//PA8 ÍÆÍìÊä³ö
GPIOA->ODR|=1<<8; //PA8 Êä³ö¸ß
GPIOD->CRL&=0XFFFFF0FF;
GPIOD->CRL|=0X00000300;//PD.2ÍÆÍìÊä³ö
GPIOD->ODR|=1<<2; //PD.2Êä³ö¸ß
}
![]()
下面仔细讲讲这些启动文件
首先是startup_stm32f10x_hd.s,这应该是最先被执行的文件,下面讲讲其内容(参考:https://blog.csdn.net/wqx521/article/details/50925553)
先从头到尾了解
用到的指令

![]()
Stack_Size EQU 0x00000400;栈的大小
AREA STACK, NOINIT, READWRITE, ALIGN=3;分配名为STACK,不初始化,可读可写,8(2^3)字节对齐的1KB空间。
Stack_Mem SPACE Stack_Size;分配空间,栈为从高到低地址生长,即Stack_Mem到__initial_sp为最大栈顶和栈底,这里Stack_Mem为地址是我个人根据最后堆栈初始化的式子做的推测
__initial_sp
;
;
;
Heap_Size EQU 0x00000200
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size;分配空间,堆为从低到高生长
__heap_limit
PRESERVE8;指定当前文件的堆栈按照 8 字节对齐。
THUMB;表示后面指令兼容 THUMB 指令。THUBM 是ARM 以前的指令集,16bit,现在 Cortex-M 系列的都使用 THUMB-2 指令集,THUMB-2 是32 位的,兼容 16 位和 32 位的指令,是 THUMB 的超级。
![]()
AREA RESET, DATA, READONLY;定义一个名为RESET,可读的数据段。并声明 __Vectors、__Vectors_End 和__Vectors_Size 这三个标号可被外部的文件使用。
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
![]()
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
........
__Vectors_End
![]()
向量表从 FLASH 的 0 地址开始放置,以 4 个字节为一个单位,地址 0 存放的是栈顶地址,0X04 存放的是复位程序的地址,以此类推。后面的都是一些中断服务程序的地址
__Vectors_Size EQU __Vectors_End - __Vectors ;__Vectors 为向量表起始地址,__Vectors_End 为向量表结束地址,两个相减即可算出向量表大小。
![]()
AREA |.text|, CODE, READONLY;定义一个名为.text,可读的代码段
; Reset handler 这里为复位程序的内容,先调用SystemInit函数,再调用_main函数,注意此_main和c中的main函数是不同的,具体下面讲
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
; Dummy Exception Handlers (infinite loops which can be modified)
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
........
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
![]()
![]()
Default_Handler PROC
EXPORT WWDG_IRQHandler [WEAK];声明函数
EXPORT PVD_IRQHandler [WEAK]
EXPORT TAMPER_IRQHandler [WEAK]
EXPORT RTC_IRQHandler [WEAK]
.........
EXPORT DMA2_Channel2_IRQHandler [WEAK]
EXPORT DMA2_Channel3_IRQHandler [WEAK]
EXPORT DMA2_Channel4_5_IRQHandler [WEAK]
WWDG_IRQHandler;定义空函数
PVD_IRQHandler
TAMPER_IRQHandler
RTC_IRQHandler
FLASH_IRQHandler
............
DMA2_Channel1_IRQHandler
DMA2_Channel2_IRQHandler
DMA2_Channel3_IRQHandler
DMA2_Channel4_5_IRQHandler
![]()
![]()
IF :DEF:__MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory;使用双段模式--两区堆栈空间,堆和栈有各自的空间地址
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END
![]()
判断是否定义了__MICROLIB ,如果定义了则赋予标号__initial_sp(栈顶地址)、__heap_base(堆起始地址)、__heap_limit(堆结束地址)全局属性,可供外部文件调用。如果没有定义(实际的情况就是我们没定义__MICROLIB)则使用默认的 C 库,然后初始化用户堆栈大小,这部分有 C 库函数__main 来完成。
以上即为大致内容的了解,但是对于具体的执行流程还是有点乱,以下整体的讲讲
当STM32产生复位后,做的第一件事就是读取下列两个32位整数的值:
1、从地址0x0000,0000处取出MSP(主堆栈指针)的初始值放入MSP寄存器中;
2、从地址0x0000,0004处取出复位向量放入PC寄存器中,然后从PC中存取的地址出取指令并开始执行
也就是说,启动文件里最先被执行的是Reset_Handler函数,更具体的说,是执行SystemInit和_main函数,前者好说,可以直接goto看到内容(在system_stm32f10x.c中,下面会讲),但是_main据我百度知,当编译器发现定义了main函数,那么就会自动创建__main,所以无法goto来查看内容,其具体内容较为复杂,这里先挖个坑-------------------------------------------------,暂时只说明,启动文件里那些堆栈的规划最后是在这个函数里得到执行的,执行完后跳转到main。
顺便一提,51单片机我记得启动后是先执行0地址跳转的,和这里不一样
其他几个文件的讲解太长了,新开一贴在此:https://www.cnblogs.com/otaganyuki/p/10310979.html