Rodrigues(罗德里格斯)公式的理解与应用(旋转矢量与旋转矩阵的转化)
第一部分: R o d r i g u e s Rodrigues Rodrigues(罗德里格斯)公式描述的是:空间内的任意一个向量 v \textbf{v} v,绕指定的旋转轴 k \textbf{k} k旋转 θ \theta θ角度,得到空间向量 v θ \textbf{v}^{\theta} vθ的过程。 R o d r i g u e s Rodrigues Rodrigues公式利用 v \textbf{v} v, k \textbf{k} k和 θ \theta θ来描述 v θ \textbf{v}^{\theta} vθ。
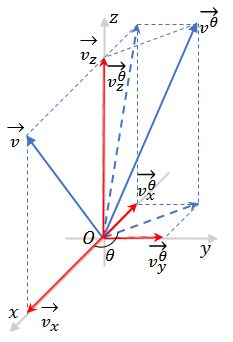
如图所示,空间内的向量 v \textbf{v} v,绕着 z z z轴旋转 θ \theta θ,得到 v θ \textbf{v}^{\theta} vθ。已知 x x x轴, y y y轴和 z z z轴的方向向量分别是 i \textbf{i} i, j \textbf{j} j和 k \textbf{k} k。约定 < a , b > <\textbf{a},\textbf{b}> <a,b>表示向量 a \textbf{a} a到向量 b \textbf{b} b的夹角。
对于空间向量 v \textbf{v} v可以分解为三个坐标轴上的投影向量的矢量和: v = v x + v y + v z \textbf{v} = \textbf{v}_x + \textbf{v}_y + \textbf{v}_z v=vx+vy+vz
其中:
v y = 0 \textbf{v}_y = \textbf{0} vy=0
v z = ∣ ∣ v ∣ ∣ ⋅ cos < k , v > ⋅ k = ∣ ∣ v ∣ ∣ ⋅ ∣ ∣ k ∣ ∣ ⋅ cos < k , v > ⋅ k = ( k ⋅ v ) ⋅ k \textbf{v}_z = ||\textbf{v}|| \cdot \cos{<\textbf{k}, \textbf{v}>} \cdot \textbf{k} = ||\textbf{v}|| \cdot ||\textbf{k}|| \cdot \cos<\textbf{k}, \textbf{v}> \cdot \textbf{k} = (\textbf{k} \cdot \textbf{v}) \cdot \textbf{k} vz=∣∣v∣∣⋅cos<k,v>⋅k=∣∣v∣∣⋅∣∣k∣∣⋅cos<k,v>⋅k=(k⋅v)⋅k
v x = ∣ ∣ v ∣ ∣ ⋅ sin < k , v > ⋅ i \textbf{v}_x = ||\textbf{v}|| \cdot \sin<\textbf{k}, \textbf{v}> \cdot \textbf{i} vx=∣∣v∣∣⋅sin<k,v>⋅i
对于 v x \textbf{v}_x vx来说,可以得到以下变换:
∣ ∣ v ∣ ∣ ⋅ sin < k , v > = ∣ ∣ v ∣ ∣ ⋅ ∣ ∣ k ∣ ∣ ⋅ sin < k , v > = ∣ ∣ k × v ∣ ∣ ||\textbf{v}|| \cdot \sin<\textbf{k}, \textbf{v}> = ||\textbf{v}|| \cdot ||\textbf{k}|| \cdot \sin<\textbf{k}, \textbf{v}> = ||\textbf{k} \times \textbf{v}|| ∣∣v∣∣⋅sin<k,v>=∣∣v∣∣⋅∣∣k∣∣⋅sin<k,v>=∣∣k×v∣∣
i = j × k \textbf{i} = \textbf{j} \times \textbf{k} i=j×k,又有 j = k × v ∣ ∣ k × v ∣ ∣ \textbf{j} = \frac{\textbf{k} \times \textbf{v}}{||\textbf{k} \times \textbf{v}||} j=∣∣k×v∣∣k×v,则 i = 1 ∣ ∣ k × v ∣ ∣ ⋅ k × v × k \textbf{i} = \frac{1}{||\textbf{k} \times \textbf{v}||} \cdot \textbf{k} \times \textbf{v} \times \textbf{k} i=∣∣k×v∣∣1⋅k×v×k
因此,可以得到: v x = ∣ ∣ k × v ∣ ∣ ⋅ 1 ∣ ∣ k × v ∣ ∣ ⋅ k × v × k = k × v × k \textbf{v}_x = ||\textbf{k} \times \textbf{v}|| \cdot \frac{1}{||\textbf{k} \times \textbf{v}||} \cdot \textbf{k} \times \textbf{v} \times \textbf{k} = \textbf{k} \times \textbf{v} \times \textbf{k} vx=∣∣k×v∣∣⋅∣∣k×v∣∣1⋅k×v×k=k×v×k
同理,对于 v θ \textbf{v}^{\theta} vθ也可以分解为 v θ = v x θ + v y θ + v z θ \textbf{v}^{\theta} = \textbf{v}_x^{\theta} + \textbf{v}_y^{\theta} + \textbf{v}_z^{\theta} vθ=vxθ+vyθ+vzθ
其中:
v z θ = v z \textbf{v}_z^{\theta} = \textbf{v}_z vzθ=vz
v x θ = ∣ ∣ v x ∣ ∣ ⋅ cos θ ⋅ i = v x ⋅ cos θ = k × v × k ⋅ cos θ \textbf{v}_x^{\theta} = ||\textbf{v}_x|| \cdot \cos{\theta} \cdot \textbf{i} = \textbf{v}_x \cdot \cos{\theta} = \textbf{k} \times \textbf{v} \times \textbf{k} \cdot \cos{\theta} vxθ=∣∣vx∣∣⋅cosθ⋅i=vx⋅cosθ=k×v×k⋅cosθ
v y θ = ∣ ∣ v x ∣ ∣ ⋅ sin θ ⋅ j = ∣ ∣ v ∣ ∣ ⋅ sin < k , v > ⋅ k × v ∣ ∣ k × v ∣ ∣ ⋅ sin θ = k × v ⋅ sin θ \textbf{v}_y^{\theta} = ||\textbf{v}_x|| \cdot \sin{\theta} \cdot \textbf{j} = ||\textbf{v}|| \cdot \sin<\textbf{k}, \textbf{v}> \cdot \frac{\textbf{k} \times \textbf{v}}{||\textbf{k} \times \textbf{v}||} \cdot \sin{\theta} = \textbf{k} \times \textbf{v} \cdot \sin{\theta} vyθ=∣∣vx∣∣⋅sinθ⋅j=∣∣v∣∣⋅sin<k,v>⋅∣∣k×v∣∣k×v⋅sinθ=k×v⋅sinθ
因此, v θ = k × v × k ⋅ cos θ + k × v ⋅ sin θ + ( k ⋅ v ) ⋅ k \textbf{v}^{\theta} = \textbf{k} \times \textbf{v} \times \textbf{k} \cdot \cos{\theta} + \textbf{k} \times \textbf{v} \cdot \sin{\theta} + (\textbf{k} \cdot \textbf{v}) \cdot \textbf{k} vθ=k×v×k⋅cosθ+k×v⋅sinθ+(k⋅v)⋅k
另,由公式( ⋆ \star ⋆) a × b × c = b ( a ⋅ c ) − c ( a ⋅ b ) \textbf{a} \times \textbf{b} \times \textbf{c} = \textbf{b}(\textbf{a}\cdot\textbf{c})-\textbf{c}(\textbf{a}\cdot\textbf{b}) a×b×c=b(a⋅c)−c(a⋅b)可以得到:
v θ = v ( k ⋅ k ) cos θ − k ( k ⋅ v ) cos θ + k × v ⋅ sin θ + ( k ⋅ v ) ⋅ k = v ⋅ cos θ + k ( k ⋅ v ) ( 1 − cos θ ) + k × v ⋅ sin θ \textbf{v}^{\theta} = \textbf{v}(\textbf{k}\cdot\textbf{k})\cos\theta-\textbf{k}(\textbf{k}\cdot\textbf{v})\cos\theta + \textbf{k} \times \textbf{v} \cdot \sin{\theta} + (\textbf{k} \cdot \textbf{v}) \cdot \textbf{k} \newline \hspace{0.45cm} = \textbf{v}\cdot\cos\theta + \textbf{k}( \textbf{k}\cdot \textbf{v})(1-\cos\theta)+ \textbf{k}\times \textbf{v}\cdot\sin\theta vθ=v(k⋅k)cosθ−k(k⋅v)cosθ+k×v⋅sinθ+(k⋅v)⋅k=v⋅cosθ+k(k⋅v)(1−cosθ)+k×v⋅sinθ
由此可以得到 R o d r i g u e s Rodrigues Rodrigues公式的结论。
\newline
\newline
第二部分: R o d r i g u e s Rodrigues Rodrigues(罗德里格斯)公式的矩阵描述形式。
上述第一部分主要从原理上证明了, R o d r i g u e s Rodrigues Rodrigues(罗德里格斯)公式的向量表述形式,在实际使用的时候,常用到的是矩阵形式的表述。事实上,矩阵形式的表述也是由向量形式经过展开和推导得来的,下面简单描述一下其中的过程。
首先将上述公式变形如下:
v θ = v ⋅ cos θ + k ( k ⋅ v ) ( 1 − cos θ ) + k × v ⋅ sin θ = v − v + v ⋅ cos θ + k ( k ⋅ v ) ( 1 − cos θ ) + k × v ⋅ sin θ = v − ( 1 − cos θ ) v + ( 1 − cos θ ) ( k ⋅ v ) k + sin θ ⋅ k × v = v + ( 1 − cos θ ) ( ( k ⋅ v ) k − v ) + sin θ ⋅ k × v = v + ( 1 − cos θ ) ( ( k ⋅ v ) k − v ( k ⋅ k ) ) + sin θ ⋅ k × v \textbf{v}^{\theta} = \textbf{v}\cdot\cos\theta + \textbf{k}( \textbf{k}\cdot \textbf{v})(1-\cos\theta)+ \textbf{k}\times \textbf{v}\cdot\sin\theta \newline \hspace{0.45cm} = \textbf{v}-\textbf{v}+\textbf{v}\cdot\cos\theta + \textbf{k}( \textbf{k}\cdot \textbf{v})(1-\cos\theta)+ \textbf{k}\times \textbf{v}\cdot\sin\theta \newline \hspace{0.45cm} = \textbf{v} - (1-\cos\theta)\textbf{v} + (1-\cos\theta)(\textbf{k}\cdot \textbf{v})\textbf{k} + \sin\theta\cdot\textbf{k}\times\textbf{v} \newline \hspace{0.45cm} = \textbf{v} + (1-\cos\theta)((\textbf{k}\cdot\textbf{v})\textbf{k} - \textbf{v}) + \sin\theta\cdot\textbf{k}\times\textbf{v} \newline \hspace{0.45cm} = \textbf{v} + (1-\cos\theta)((\textbf{k}\cdot\textbf{v})\textbf{k} - \textbf{v}(\textbf{k}\cdot\textbf{k})) + \sin\theta\cdot\textbf{k}\times\textbf{v} \newline vθ=v⋅cosθ+k(k⋅v)(1−cosθ)+k×v⋅sinθ=v−v+v⋅cosθ+k(k⋅v)(1−cosθ)+k×v⋅sinθ=v−(1−cosθ)v+(1−cosθ)(k⋅v)k+sinθ⋅k×v=v+(1−cosθ)((k⋅v)k−v)+sinθ⋅k×v=v+(1−cosθ)((k⋅v)k−v(k⋅k))+sinθ⋅k×v
由公式( ⋆ \star ⋆) a × b × c = b ( a ⋅ c ) − c ( a ⋅ b ) \textbf{a} \times \textbf{b} \times \textbf{c} = \textbf{b}(\textbf{a}\cdot\textbf{c})-\textbf{c}(\textbf{a}\cdot\textbf{b}) a×b×c=b(a⋅c)−c(a⋅b)可以得到:
v θ = v + ( 1 − cos θ ) ( k × k × v ) + sin θ ⋅ k × v \textbf{v}^{\theta} = \textbf{v} + (1-\cos\theta)(\textbf{k}\times\textbf{k}\times\textbf{v}) + \sin\theta\cdot\textbf{k}\times\textbf{v} vθ=v+(1−cosθ)(k×k×v)+sinθ⋅k×v
引入公式( † \dagger †) a × b = Ab \textbf{a}\times\textbf{b}=\textbf{A}\textbf{b} a×b=Ab,其中 a \textbf{a} a和 b \textbf{b} b是空间中的两个向量, A \textbf{A} A是向量 a \textbf{a} a的“叉积矩阵”:
A = [ 0 − a z a y a z 0 − a x − a y a x 0 ] \textbf{A} = \left[ \begin{matrix} 0 & -a_z & a_y \\ a_z & 0 & -a_x \\ -a_y & a_x & 0 \\ \end{matrix} \right] A=⎣⎡0az−ay−az0axay−ax0⎦⎤
因此, k × v = Kv \textbf{k}\times\textbf{v}=\textbf{K}\textbf{v} k×v=Kv,其中 K \textbf{K} K是 k \textbf{k} k的“叉积矩阵”,则 k × k × v = K 2 v \textbf{k}\times\textbf{k}\times\textbf{v} = \textbf{K}^2\textbf{v} k×k×v=K2v
由此可以得到:
v θ = v + ( 1 − cos θ ) ( k × k × v ) + sin θ ⋅ k × v = v + ( 1 − cos θ ) ⋅ K 2 v + sin θ ⋅ Kv = Rv \textbf{v}^{\theta} = \textbf{v} + (1-\cos\theta)(\textbf{k}\times\textbf{k}\times\textbf{v}) + \sin\theta\cdot\textbf{k}\times\textbf{v} \newline \hspace{0.45cm}=\textbf{v}+(1-\cos\theta)\cdot\textbf{K}^2\textbf{v}+ \sin\theta\cdot\textbf{K}\textbf{v} \newline \hspace{0.45cm}=\textbf{R}\textbf{v} vθ=v+(1−cosθ)(k×k×v)+sinθ⋅k×v=v+(1−cosθ)⋅K2v+sinθ⋅Kv=Rv
其中: R = I + K sin θ + K 2 ( 1 − cos θ ) \textbf{R}=\textbf{I}+\textbf{K}\sin\theta+\textbf{K}^2(1-\cos\theta) R=I+Ksinθ+K2(1−cosθ)
则上述 v θ = v + sin θ ⋅ Kv + ( 1 − cos θ ) ⋅ K 2 v \textbf{v}^{\theta} = \textbf{v} + \sin\theta\cdot\textbf{K}\textbf{v} + (1-\cos\theta)\cdot\textbf{K}^2\textbf{v} vθ=v+sinθ⋅Kv+(1−cosθ)⋅K2v是矩阵描述形式。
\newline
\newline
第三部分:旋转矩阵与旋转向量的转化
由上述两个部分的阐述,可以得知,若一个空间矢量,围绕给定的方向轴旋转一个角度得到一个新的空间矢量,可以通过罗德里格斯公式来描绘,旋转前后两个矢量之间的相对关系。
由此可以设想,对于任意空间矢量 v \textbf{v} v,可以在笛卡尔坐标系下分别绕三个坐标轴 i \textbf{i} i, j \textbf{j} j, k \textbf{k} k旋转不同的角度:俯仰角 p i t c h pitch pitch,偏航角 y a w yaw yaw,翻滚角 r o l l roll roll,则对于每一次相对单个坐标轴的旋转,都存在一个可以通过罗格里德斯公式来描述的旋转矩阵:
R p i t c h = I + sin θ ⋅ K i + ( 1 − cos θ ) ⋅ K i 2 \textbf{R}_{pitch}=\textbf{I}+\sin\theta\cdot\textbf{K}_i+(1-\cos\theta)\cdot\textbf{K}_i^2 Rpitch=I+sinθ⋅Ki+(1−cosθ)⋅Ki2
R y a w = I + sin θ ⋅ K j + ( 1 − cos θ ) ⋅ K j 2 \textbf{R}_{yaw}=\textbf{I}+\sin\theta\cdot\textbf{K}_j+(1-\cos\theta)\cdot\textbf{K}_j^2 Ryaw=I+sinθ⋅Kj+(1−cosθ)⋅Kj2
R r o l l = I + sin θ ⋅ K k + ( 1 − cos θ ) ⋅ K k 2 \textbf{R}_{roll}=\textbf{I}+\sin\theta\cdot\textbf{K}_k+(1-\cos\theta)\cdot\textbf{K}_k^2 Rroll=I+sinθ⋅Kk+(1−cosθ)⋅Kk2
则两个空间矢量间的矩阵 R = R p i t c h R y a w R r o l l \textbf{R}=\textbf{R}_{pitch}\textbf{R}_{yaw}\textbf{R}_{roll} R=RpitchRyawRroll。
由于空间平面可以由平面内的任意一点和平面的法向量唯一确定,则空间中两个法向量之间的关系,可以由罗德里格斯变换外加一个坐标系平移矢量联系起来时,则这两个平面也遵从相同的联系。这是在机器视觉中极为重要的应用。