LevelDB原理探究与代码分析(上)
1.概述
LevelDB(http://code.google.com/p/leveldb/)是google开源的Key/Value存储系统,它的committer阵容相当强大,基本上是bigtable的原班人马,包括像jeff dean这样的大牛,它的代码合设计非常具有借鉴意义,是一种典型的LSM Tree的KV引擎的实现,从它的数据结构来看,基本就是sstable的开源实现,而且针对各种平台作了port,目前被用在chrome等项目中。
2. LSM Tree
LevelDB是典型的Log-Structured-Merge Tree的实现,它通过延迟写入以及Write Log Ahead技术来加速数据的写入并保障数据的安全。LevelDB的每个数据文件(sstable)中的记录都是按照Key的顺序进行排序的,但是随机写入时,key的到来是无序的,因此难以将记录插入到其排序位置。于是需要它采取一种延迟写入的方式,批量攒集一定量的数据,将它们在内存中排好序,一次性写入到磁盘中。但是这期间一旦系统断电或其他异常,则可能导致数据丢失,因此需要将数据先写入到log的文件中,这样便将随机写转化为追加写入,对于磁盘性能会有很大提升,如果进程发生中断,重启后可以根据log恢复之前写入的数据。
2.1 Write Batch
std::string key1,key2,value;
leveldb::Status s;
s = db->Put(leveldb::WriteOptions(), key1, value);
s = db->Delete(leveldb::WriteOptions(), key2);std::string key1,key2,value;
leveldb::WriteBatch batch;
batch.Delete(key1);
batch.Put(key2, value);
leveldb::status s = db->Write(leveldb::WriteOptions(), &batch);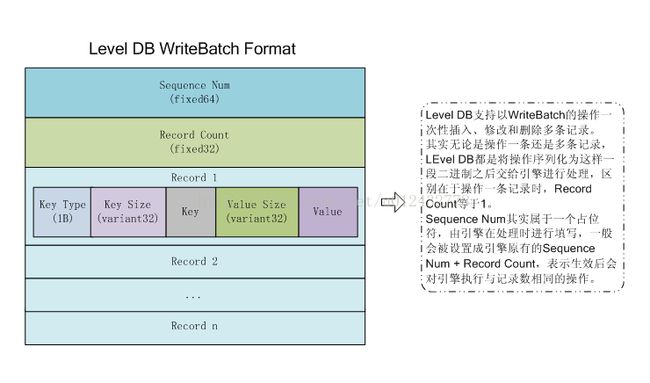
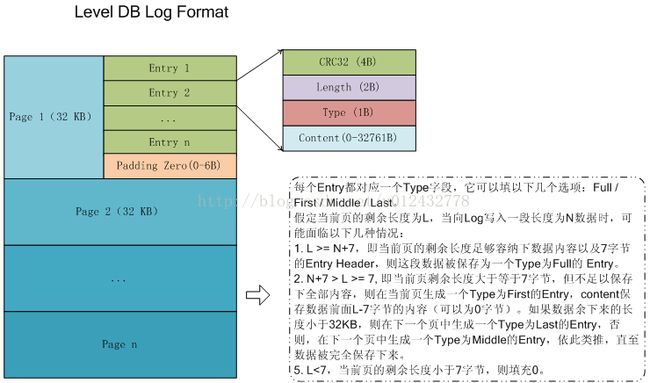
2.2 Log Format
class PosixMmapFile : public WritableFile
{
private:
std::string filename_; // 文件名称
int fd_; // 文件句柄
size_t page_size_; //
size_t map_size_; // 内存映射的区域大小
char* base_; // 内存映射区域的起始地址
char* limit_; // 内存映射区域的结束地址
char* dst_; // 最后一次占用的内存的结束地址
char* last_sync_; // 最后一次同步到磁盘的结束地址
uint64_t file_offset_; // 当前文件的偏移值
bool pending_sync_; // 延迟同步的标志
public:
PosixMmapFile(const std::string& fname, int fd, size_t page_size)
: filename_(fname),
fd_(fd),
page_size_(page_size),
map_size_(Roundup(65536, page_size)),
base_(NULL),
limit_(NULL),
dst_(NULL),
last_sync_(NULL),
file_offset_(0),
pending_sync_(false) {
assert((page_size & (page_size - 1)) == 0);
}
~PosixMmapFile() {
if (fd_ >= 0) {
PosixMmapFile::Close();
}
}
Status Append(const Slice& data) {
const char* src = data.data();
size_t left = data.size();
while (left > 0) {
// 计算上次最后一次申请的区域的剩余容量,如果已完全耗尽,
// 则卸载当前区域,申请一个新的区域
size_t avail = limit_ - dst_;
if (avail == 0) {
if (!UnmapCurrentRegion() ||
!MapNewRegion()) {
return IOError(filename_, errno);
}
}
// 填充当前区域的剩余容量
size_t n = (left <= avail) ? left : avail;
memcpy(dst_, src, n);
dst_ += n;
src += n;
left -= n;
}
return Status::OK();
}
Status PosixMmapFile::Close() {
Status s;
size_t unused = limit_ - dst_;
if (!UnmapCurrentRegion()) {
s = IOError(filename_, errno);
} else if (unused > 0) {
// 关闭时将文件没有使用用的空间truncate掉
if (ftruncate(fd_, file_offset_ - unused) < 0) {
s = IOError(filename_, errno);
}
}
if (close(fd_) < 0) {
if (s.ok()) {
s = IOError(filename_, errno);
}
}
fd_ = -1;
base_ = NULL;
limit_ = NULL;
return s;
}
virtual Status Sync() {
Status s;
if (pending_sync_) {
// 上个区域也有数据未同步,则先同步数据
pending_sync_ = false;
if (fdatasync(fd_) < 0) {
s = IOError(filename_, errno);
}
}
if (dst_ > last_sync_) {
// 计算未同步数据的起始与结束地址,同步时,起始地址按page_size_向下取整,
// 结束地址向上取整,保证每次同步都是同步一个或多个page
size_t p1 = TruncateToPageBoundary(last_sync_ - base_);
size_t p2 = TruncateToPageBoundary(dst_ - base_ - 1);
// 如果刚好为整数个page_size_,由于下面同步时必然会加一个page_size_,所以这里可以减去1
last_sync_ = dst_;
if (msync(base_ + p1, p2 - p1 + page_size_, MS_SYNC) < 0) {
s = IOError(filename_, errno);
}
}
return s;
}
private:
// 将x按y向上对齐
static size_t Roundup(size_t x, size_t y) {
return ((x + y - 1) / y) * y;
}
// 将s按page_size_向下对齐
size_t TruncateToPageBoundary(size_t s) {
s -= (s & (page_size_ - 1));
assert((s % page_size_) == 0);
return s;
}
// 卸载当前映射的内存区域
bool UnmapCurrentRegion() {
bool result = true;
if (base_ != NULL) {
if (last_sync_ < limit_) {
// 如果当前页没有完全被同步,则标明本文件需要被同步,下次调用Sync()方法时会将本页中未同步的数据同步到磁盘
pending_sync_ = true;
}
if (munmap(base_, limit_ - base_) != 0) {
result = false;
}
file_offset_ += limit_ - base_;
base_ = NULL;
limit_ = NULL;
last_sync_ = NULL;
dst_ = NULL; // 使用翻倍的策略增加下次申请区域的大小,最大到1MB
if (map_size_ < (1<<20)) {
map_size_ *= 2;
}
}
return result;
}
bool MapNewRegion() {
assert(base_ == NULL); // 申请一个新的区域时,上一个申请的区域必须已经卸载
// 先将文件扩大
if (ftruncate(fd_, file_offset_ + map_size_) < 0) {
return false;
}
// 将新区域映射到文件
void* ptr = mmap(NULL, map_size_, PROT_READ | PROT_WRITE, MAP_SHARED,
fd_, file_offset_);
if (ptr == MAP_FAILED) {
return false;
}
base_ = reinterpret_cast(ptr);
limit_ = base_ + map_size_;
dst_ = base_;
last_sync_ = base_;
return true;
}
}; 
Status Writer::AddRecord(const Slice& slice) {
const char* ptr = slice.data();
size_t left = slice.size();
Status s;
bool begin = true;
do {
const int leftover = kBlockSize - block_offset_;
assert(leftover >= 0);
if (leftover < kHeaderSize) {
// 如果当前page的剩余长度小于7字节且大于0,则都填充'\0',并新起一个page
if (leftover > 0) {
assert(kHeaderSize == 7);
dest_->Append(Slice("\x00\x00\x00\x00\x00\x00", leftover));
}
block_offset_ = 0;
}
// 计算page能否容纳整体日志,如果不能,则将日志切分为多条entry,插入不同的page中,type中注明该entry是日志的开头部分,中间部分还是结尾部分。
const size_t avail = kBlockSize - block_offset_ - kHeaderSize;
const size_t fragment_length = (left < avail) ? left : avail;
RecordType type;
const bool end = (left == fragment_length);
if (begin && end) {
type = kFullType; // 本Entry保存完整的Batch
} else if (begin) {
type = kFirstType; // 本Entry只保存起始部分
} else if (end) {
type = kLastType; // 本Entry只保存结束部分
} else {
type = kMiddleType; // 本Entry保存Batch的中间部分,不含起始与结尾,有时可能需要保存多个middle
}
s = EmitPhysicalRecord(type, ptr, fragment_length);
ptr += fragment_length;
left -= fragment_length;
begin = false;
} while (s.ok() && left > 0);
return s;
}
Status Writer::EmitPhysicalRecord(RecordType t, const char* ptr, size_t n) {
assert(n <= 0xffff);
assert(block_offset_ + kHeaderSize + n <= kBlockSize);
// 填充记录头
char buf[kHeaderSize];
buf[4] = static_cast(n & 0xff);
buf[5] = static_cast(n >> 8);
buf[6] = static_cast(t);
// 计算crc
uint32_t crc = crc32c::Extend(type_crc_[t], ptr, n);
crc = crc32c::Mask(crc);
EncodeFixed32(buf, crc);
// 填充entry内容
Status s = dest_->Append(Slice(buf, kHeaderSize));
if (s.ok()) {
s = dest_->Append(Slice(ptr, n));
if (s.ok()) {
s = dest_->Flush();
}
}
block_offset_ += kHeaderSize + n;
return s;
}
2.3 Write Log Ahead
Status DBImpl::Write(const WriteOptions& options, WriteBatch* updates)
{
Status status;
MutexLock l(&mutex_); // 锁定互斥体,同一时间只能有一个线程更新数据
LoggerId self;
// 获取Logger的使用权,如果有其他线程拥有所有权,则等待至其释放所有权。
AcquireLoggingResponsibility(&self);
status = MakeRoomForWrite(false); // May temporarily release lock and wait
uint64_t last_sequence = versions_->LastSequence(); // 获取当前的版本号
if (status.ok()) {
// 将当前版本号加1后作为本次更新的日志的版本,
// 一次批量更新可能包含多个操作,这些操作都用一个版本有一个好处:
// 本次更新的所有操作,要么都可见,要么都不可见,不存在一部分可见,另一部分不可见的情况。
WriteBatchInternal::SetSequence(updates, last_sequence + 1);
// 但是本次更新可能有多个操作,跳过与操作数相等的版本号,保证不被使用
last_sequence += WriteBatchInternal::Count(updates);
// 将batch写入log,然后应用到memtable中
{
assert(logger_ == &self);
mutex_.Unlock();
// 这里,可以解锁,因为在AcquireLoggingResponsibility()方法中已经获取了Logger的拥有权,
// 其他线程即使获得了锁,但是由于&self != logger,其会阻塞在AcquireLoggingResponsibility()方法中。
// 将更新写入log文件,如果设置了每次写入进行sync,则将其同步到磁盘,这个操作可能比较长,
// 防止了mutex_对象长期被占用,因为其还负责其他一些资源的同步
status = log_->AddRecord(WriteBatchInternal::Contents(updates));
if (status.ok() && options.sync) {
status = logfile_->Sync();
}
if (status.ok()) {
// 成功写入了log后,才写入memtable
status = WriteBatchInternal::InsertInto(updates, mem_);
}
// 重新锁定mutex_
mutex_.Lock();
assert(logger_ == &self);
}
// 更新版本号
versions_->SetLastSequence(last_sequence);
}
// 释放对logger的所有权,并通知等待的线程,然后解锁
ReleaseLoggingResponsibility(&self);
return status;
}
// force参数表示强制新起一个memtable
Status DBImpl::MakeRoomForWrite(bool force) {
mutex_.AssertHeld();
assert(logger_ != NULL);
bool allow_delay = !force;
Status s;
while (true) {
if (!bg_error_.ok()) {
// 后台线程存在问题,则返回错误,不接受更新
s = bg_error_;
break;
} else if (
allow_delay &&
versions_->NumLevelFiles(0) >= config::kL0_SlowdownWritesTrigger) {
// 如果不是强制写入,而且level 0的sstable超过8个,则本次更新阻塞1毫秒,
// leveldb将sstable分为多个等级,其中level 0中的不同表的key是可能重叠的,
// 如果l0的sstable过多,会导致查询性能下降,这时需要适当降低更新速度,让
// 后台线程进行compaction操作,但是设计者不希望让某次写操作等待数秒,
// 而是让每次更新操作分担延迟,即每次写操作阻塞1毫秒,平衡读写速率;
// 另外,理论上这也能让compaction线程获得更多的cpu时间(当然,
// 这是假定compaction与更新操作共享一个CPU时才有意义)
mutex_.Unlock();
env_->SleepForMicroseconds(1000);
allow_delay = false; // 最多延迟一次,下次不延迟
mutex_.Lock();
} else if (!force &&
(mem_->ApproximateMemoryUsage() <= options_.write_buffer_size)) {
// 如果当前memtable已使用的空间小于write_buffer_size,则跳出,更新到当前memtable即可。
// 当force为true时,第一次循环会走后面else逻辑,切换了memtable后force被置为false,
// 第二次循环时就可以在此跳出了
break;
} else if (imm_ != NULL) {
// 如果当前memtable已经超过write_buffer_size,且备用的memtable也在被使用,则阻塞更新并等待
bg_cv_.Wait();
} else if (versions_->NumLevelFiles(0) >= config::kL0_StopWritesTrigger) {
// 如果当前memtable已使用的空间小于write_buffer_size,但是备用的memtable未被使用,
// 则检查level 0的sstable个数,如超过12个,则阻塞更新并等待
Log(options_.info_log, "waiting...\n");
bg_cv_.Wait();
} else {
// 否则,使用新的id新创建一个log文件,并将当前memtable切换为备用的memtable,新建一个
// memtable,然后将数据写入当前的新memtable,即切换log文件与memtable,并告诉后台线程
// 可以进行compaction操作了
assert(versions_->PrevLogNumber() == 0);
uint64_t new_log_number = versions_->NewFileNumber();
WritableFile* lfile = NULL;
s = env_->NewWritableFile(LogFileName(dbname_, new_log_number), &lfile);
if (!s.ok()) {
break;
}
delete log_;
delete logfile_;
logfile_ = lfile;
logfile_number_ = new_log_number;
log_ = new log::Writer(lfile);
imm_ = mem_;
has_imm_.Release_Store(imm_);
mem_ = new MemTable(internal_comparator_);
mem_->Ref();
force = false; // 下次判断可以不新建memtable了
MaybeScheduleCompaction();
}
}
return s;
}
void DBImpl::AcquireLoggingResponsibility(LoggerId* self) {
while (logger_ != NULL) {
logger_cv_.Wait();
}
logger_ = self;
}
void DBImpl::ReleaseLoggingResponsibility(LoggerId* self) {
assert(logger_ == self);
logger_ = NULL;
logger_cv_.SignalAll();
}
2.4 Skip List
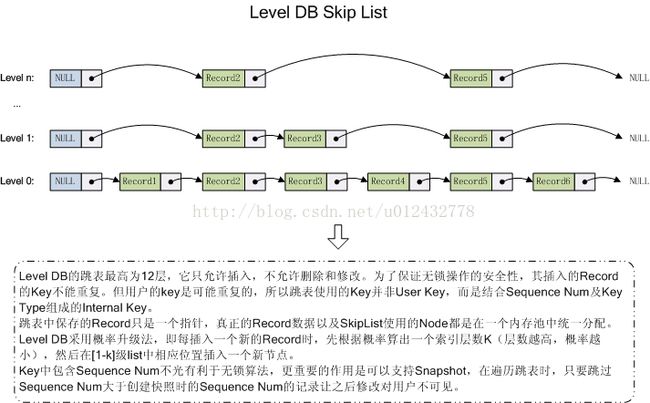
1. 看上图,假定我们链不存在record3,level0中,record2的下一条记录是record4,level1中,record2的下一条记录是record5。
2. 现在,我们插入一条记录record3,通过key的比较,我们定位到它应该在record2与record4之间。
3. 然后,我们按照下面的代码确定一条记录需要在跳表中建立几重索引:
template
int SkipList::RandomHeight() {
// Increase height with probability 1 in kBranching
static const unsigned int kBranching = 4;
int height = 1;
while (height < kMaxHeight && ((rnd_.Next() % kBranching) == 0)) {
height++;
}
return height;
} 按照上面的代码,我们可以得出,建立x级索引的概率是0.25 ^(x - 1) * 0.75,所以,建立1级索引的概率为75%,建立2级索引的概率为25%*75%=18.75%,...(个人感觉,google把分支因子定为4有点高了,这样在绝大多数情况下,跳表的高度都不大于3)。
4. 在level0 ~ level (x-1)中链表的合适位置插入record3,假定根据上面的公式,我们得到需要为record3建立2级索引,即x=2,因此需要在level0与level1中的链中插入record3:在level 0的链中,record3插在record2与record4之间,在level 1的链中,record3插入在record2与record5之间,形成了现在的索引结构,在查询一个记录时,可以从最高一级索引向下查找,节约比较次数。2.5 Record Format
LevelDB将用户的每个更新或删除操作组合成一个Record,其格式如下:

Internal Key在比较时,按照下面的算法:
int InternalKeyComparator::Compare(const Slice& akey, const Slice& bkey) const {
int r = user_comparator_->Compare(ExtractUserKey(akey), ExtractUserKey(bkey));
if (r == 0) {
// 比较后面8个字节构造的整数,第一个字节的type为Least Significant Byte
const uint64_t anum = DecodeFixed64(akey.data() + akey.size() - 8);
const uint64_t bnum = DecodeFixed64(bkey.data() + bkey.size() - 8);
if (anum > bnum) // 注意:整数大反而key比较小
{
r = -1;
} else if (anum < bnum) {
r = +1;
}
}
return r;
}根据上面的算法,我们可以得知Internal Key的比较顺序:
1. 如果User Key不相等,则User Key比较小的记录的Internal Key也比较小,User Key默认采用字典序(lexicographic)进行比较,可以在建表参数中自定义comparator。
2. 如果type也相同,则比较Sequence Num,Sequence Num大的Internal Key比较小。
3. 如果Sequence Num相等,则比较Type,type为更新(Key Type=1)的记录比的type为删除(Key Type=0)的记录的Internal Key小。
在插入到跳表时,一般不会出现Internal Key相等的情况(除非在一个Batch中操作了同一条记录两次,这里会出现一种bug:在一个Write Batch中,先插入一条记录,然后删除这条记录,最后把这个Batch写入DB,会发现DB中这条记录存在。因此,不推荐在Batch中多次操作相同key的记录),User Key相同的记录插入跳表时,Sequence Num大的记录会排在前面。
设计Internal Key有个以下一些作用:
1. Level DB支持快照查询,即查询时指定快照的版本号,查询出创建快照时某个User Key对应的Value,那么可以组成这样一个Internal Key:Sequence=快照版本号,Type=1,User Key为用户指定Key,然后查询数据文件与内存,找到大于等于此Internal Key且User Key匹配的第一条记录即可(即Sequence Num小于等于快照版本号的第一条记录)。
2.如果查询最新的记录时,将Sequence Num设置为0xFFFFFFFFFFFFFF即可。因为我们更多的是查询最新记录,所以让Sequence Num大的记录排前面,可以在遍历时遇见第一条匹配的记录立即返回,减少往后遍历的次数。