bootsect.s 分析—— Linux-0.11 学习笔记(一)
bootsect.s分析—— Linux-0.11学习笔记(一)
为了节省篇幅,完整的代码就不贴了。感兴趣的朋友可以去下载,下载地址是:
http://oldlinux.org/Linux.old/
本文,我打算详解bootsect.s。如有纰缪,还请各位看官斧正。关于如何讲好代码,我暂时没有找到什么好的展示方法。姑且贴一段、注释一段、讲一段吧。为了不使代码片太长,我删去了一些原来的注释。
一些符号常量
SYSSIZE = 0x3000 ;system模块的长度
.globl begtext, begdata, begbss, endtext, enddata, endbss
.text
begtext:
.data
begdata:
.bss
begbss:
.text
SETUPLEN = 4 ! setup模块的长度,4个扇区
BOOTSEG = 0x07c0 ! original address of boot-sector
INITSEG = 0x9000 ! bootsect把自身搬运到0x90000
SETUPSEG = 0x9020 ! setup模块被加载到 0x90200
SYSSEG = 0x1000 ! system模块被加载到0x10000
ENDSEG = SYSSEG + SYSSIZE ! where to stop loading, 0x1000 + 0x3000 = 0x4000, 停止加载的段地址
ROOT_DEV = 0x306 !第2个硬盘的第1个分区ROOT_DEV = 0x306 ,这里的0x306表示第2个硬盘的第1个分区,当年Linus是在第2个硬盘的第1个分区上安装了Linux-0.11操作系统。
老式Linux设备号的命名规则
设备号 = 主设备号 * 256 + 次设备号
或者说:
dev_no = (major << 8) + minor
这里的主设备号是事先定义好的(1-内存,2-磁盘,3-硬盘,4-ttyx,5-tty,6-并行口,7-非命名管道)。譬如对于硬盘,主设备号为3,因此3*256+0=0x300即为系统中第一个硬盘的设备号。更多的例子如下表:
| 设备号 | 设备文件 | 对应的设备 |
|---|---|---|
| 0x300 | /dev/hd0 | 系统中第一个硬盘 |
| 0x301 | /dev/hd1 | 系统中第一个硬盘的第一分区 |
| 0x302 | /dev/hd2 | 系统中第一个硬盘的第二分区 |
| 0x303 | /dev/hd3 | 系统中第一个硬盘的第三分区 |
| 0x304 | /dev/hd4 | 系统中第一个硬盘的第四分区 |
| 0x305 | /dev/hd5 | 系统中第二个硬盘 |
| 0x306 | /dev/hd6 | 系统中第二个硬盘的第一分区 |
| 0x307 | /dev/hd7 | 系统中第二个硬盘的第二分区 |
| 0x308 | /dev/hd8 | 系统中第二个硬盘的第三分区 |
| 0x309 | /dev/hd9 | 系统中第二个硬盘的第四分区 |
bootsect 把自己搬运到 0x90000,并跳转
entry _start
_start:
mov ax,#BOOTSEG
mov ds,ax !ds = 0x07c0
mov ax,#INITSEG
mov es,ax !ex = 0x9000
mov cx,#256 !搬运256次
sub si,si !si = 0
sub di,di !di = 0
!ds:si=0x07c0:0x0, es:di=0x9000:0x0
rep
movw !每次搬运2个字节
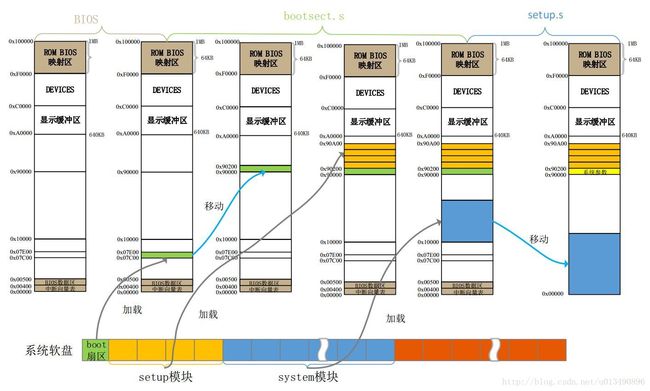
jmpi go,INITSEG !跳转到 0x9000:go以上代码表示把ds:si处(物理地址0x7c00)的内容搬运到es:di(物理地址0x90000),一共搬运512字节,即主引导扇区把自己移动到了0x90000处。
对于movw指令,可以参考我的博文。
http://blog.csdn.net/longintchar/article/details/50949923
我的疑问是,Linus为什么没有清除DF标志呢?是不是设置DF=0会更严谨呢?
jmpi go,INITSEG段间跳转,INITSEG是段地址,go是偏移地址。这句话执行完,CPU就一下子跑到了0x9000:go处执行了。(下图中左边的蓝色箭头,点击图片可放大)
跳转后继续执行下面的指令,设置ds,es,ss和sp.
go: mov ax,cs
mov ds,ax
mov es,ax !ds=es=cs=0x9000
mov ss,ax
mov sp,#0xFF00
!es:sp = 0x9000:0xff00 ,栈的设置 加载 setup 模块到 0x90200
load_setup:
mov dx,#0x0000 ! 驱动器号(DL)0,磁头号(DH)0
mov cx,#0x0002 ! 起始扇区号2, 磁道号0
mov bx,#0x0200 ! 偏移地址0x200
mov ax,#0x0200+SETUPLEN ! 功能号AH=0x02,AL=要读的扇区数目=SETUPLEN=4
int 0x13 ! read it
jnc ok_load_setup ! ok - continue
mov dx,#0x0000 !需要复位的驱动器号=DL=0
mov ax,#0x0000 !功能号AH=0
int 0x13 ! 复位磁盘
j load_setup
以上代码利用INT 13H, AH=02H把setup模块从磁盘(2~5扇区)加载到0x90200后面。
注意:柱面号和磁头号都从0开始,扇区号从1开始。
INT 13H AH=02H:读扇区
此功能从磁盘上把一个或更多的扇区内容读进内存。这是一个低级功能,在一个操作中读取的全部扇区必须在同一条磁道上。
| 参数 | 说明 |
|---|---|
| 入口参数 | |
| AH | =02H ,指明调用读扇区功能。 |
| AL | 要读的扇区数目,不允许使用读磁道末端以外的数值,也不允许使该寄存器为0。 |
| DL | 需要进行读操作的驱动器号,0表示软盘,80H表示硬盘。 |
| DH | 所读磁盘的磁头号。 |
| CH | 磁道号的低8位数(磁道号共10位)。 |
| CL | 低5位放入所读起始扇区号,位7-6表示磁道号的高2位。 |
| ES:BX | 读出数据的缓冲区地址。 |
| 返回参数 | |
| CF | =0,操作成功;=1,操作失败。 |
| AH | 错误返回码。 |
| AL | 实际读到的扇区数。 |
INT 13H AH=00H:磁盘控制器复位
此功能用于复位磁盘(软盘和硬盘)。当磁盘I/O功能调用出现错误时,需要调用此功能。
| 参数 | 说明 |
|---|---|
| 入口参数 | |
| AH | =00H,指明调用复位磁盘功能。 |
| DL | 需要复位的驱动器号。软盘:00H-7FH;硬盘:80H-FFH |
| 返回参数 | |
| CF | =0,操作成功;=1,则操作失败 |
| AH | 错误返回码。 |
获得磁盘驱动器参数(主要是每磁道的扇区数量)
ok_load_setup:
! Get disk drive parameters, specifically nr of sectors/track
mov dl,#0x00 !驱动器号为0,说明是软盘
mov ax,#0x0800 ! AH=8 is get drive parameters
int 0x13
mov ch,#0x00 !这里用不上软盘的最大磁道号,可以使CH=0
seg cs !把段超越前缀设置为cs,只影响下一条语句
mov sectors,cx
!保存每磁道最大扇区数。对于软盘,最大磁道号不会超过256,所以CH足以表示,CL[7:6]为0
!以上两句可以写为 mov cs:[sectors], cx
mov ax,#INITSEG
mov es,ax !因为上面ES的值被修改,所以令ES=0x9000INT 13H AH=08H:读取驱动器参数
| 参数 | 说明 |
|---|---|
| 入口参数 | |
| AH | =08H,读取驱动器参数 |
| DL | 驱动器号(如果是硬盘则[7]=1) |
| 返回参数 | |
| CF | 0-操作成功;1-操作失败 |
| AH | 错误返回码 |
| BL | 驱动器类型 |
| CH | 最大磁道号的[7:0] |
| CL[7:6] | 最大磁道号的[9:8] |
| CL[5:0] | 每磁道最大扇区数 |
| DH | 最大磁头数 |
| DL | 驱动器数量 |
| ES:DI | 指向软驱磁盘参数表 |
打印 “Loading system …”
mov ah,#0x03 !读光标的位置
xor bh,bh !bh=页号
int 0x10我们主要是用行号(DH中)和列号(DL中)。
INT 10H AH=03H:获取光标位置和形状
| 参数 | 说明 |
|---|---|
| 入口参数 | |
| AH | =03H,读光标的位置 |
| BH | 页号 |
| 返回参数 | |
| CH | 行扫描开始 |
| CL | 行扫描结束 |
| DH | 行号 |
| DL | 列号 |
INT 10H AH=13H:在Teletype模式下显示字符串
| 参数 | 说明 |
|---|---|
| 入口参数 | |
| AH | =13H,在Teletype模式下显示字符串 |
| BH | 页码 |
| BL | 属性(若 AL=00H 或 01H) |
| CX | 要显示的字符串的长度 |
| DH、DL | 坐标(行、列) |
| ES:BP | 指向要显示的字符串 |
| AL | 显示输出方式 |
| 返回参数 | |
| 无 |
对于显示输出方式,解释如下:
| 取值 | 说明 | 字符串格式 |
|---|---|---|
| 0 | 字符串中只含显示字符,显示属性在BL中;显示后,光标位置不变 | char1,char2,……,charN |
| 1 | 字符串中只含显示字符,显示属性在BL中;显示后,光标位置跟随字符串改变 | char1,char2,……,charN |
| 2 | 字符串中含有显示字符和显示属性;显示后,光标位置不变 | char1,attri1,char2,attri2,……,charN,attriN |
| 3 | 字符串中含有显示字符和显示属性;显示后,光标位置跟随字符串改变 | char1,attri1,char2,attri2,……,charN,attriN |
mov cx,#24 ! 24个字符
mov bx,#0x0007 ! page 0, attribute 7 (normal)
mov bp,#msg1
mov ax,#0x1301 ! write string, move cursor
int 0x10msg1:
.byte 13,10
.ascii "Loading system ..."
.byte 13,10,13,1013是回车,10是换行。它们的区别如下表。
回车和换行
| 中文名称 | 英文名称 | 字母简写 | ASCII码 | 来源 |
|---|---|---|---|---|
| 回车 | carriage return | CR | 0x0D=13D | “车”指的是纸车,它带着纸向左移动。在开始打第一个字之前,要把纸车拉到最右边,使弹簧收紧。随着打字的进行,弹簧把纸车推向左边。把纸车拉到最右边,叫做“回车”。 |
| 换行 | line feed | LF | 0x0A=10D | 换行的概念是,打字机左边有个”把手”,扳动一下把手,纸就会上移一行。 |
加载 system 到 0x10000
! we want to load the system (at 0x10000)
mov ax,#SYSSEG ! SYSSEG=0x1000
mov es,ax ! segment of 0x010000
call read_it
call kill_motor3~5行,把system模块加载到0x10000。
第6行,关闭驱动器马达。
过程read_it
这个过程的功能是把还未读取的扇区加载到es:0x0000处。注意:es必须是0x1000的整数倍,否则会陷入死循环。每读64KB,都会使es的值增加0x1000,当es=0x4000的时候,停止读取。
sread: .word 1+SETUPLEN !当前磁道已经读取的扇区数, 前面的1表示引导扇区bootsect.s
head: .word 0 ! current head,当前磁头号
track: .word 0 ! current track,当前磁道号
read_it:
mov ax,es
test ax,#0x0fff !使ax与0xfff按位与,测试es是否为0x1000的整数倍
die: jne die !结果不为0(说明es不是0x1000的整数倍)则陷入死循环
xor bx,bx ! bx(作为段内偏移地址)清零
rp_read:
mov ax,es
cmp ax,#ENDSEG ! 实际上求(ax-ENDSEG)
jb ok1_read ! 当CF=1(axret ! 当ax>=ENDSEG时返回(我认为不会出现大于的情况)
ok1_read:
seg cs
mov ax,sectors ! 这两句相当于 mov ax, cs:[sectors]; 获得每磁道扇区数
sub ax,sread ! ax = ax - sread, 得出本磁道未读扇区数
mov cx,ax
shl cx,#9 ! cx乘以512,求出字节数
add cx,bx ! 以上3行相当于 cx = ax * 512 + bx
! 假设再读ax个扇区,cx就是段内共读入的字节数
jnc ok2_read ! 若cx < 0x10000(CF=0,没有进位)则跳转到ok2_read
je ok2_read ! 若cx = 0(ZF=1),说明刚好读入64KB,则跳转到ok2_read
xor ax,ax ! ax = 0x0000
sub ax,bx ! 求bx对0x10000的补数,结果在ax中
shr ax,#9 ! 除以512,得到扇区数,AL作为参数,传给read_track
ok2_read:
call read_track !调用read_track过程,用AL传参,读取AL个扇区到ES:BX
mov cx,ax !cx是该次操作已经读取的扇区数
add ax,sread !ax是当前磁道已经读取的扇区数
seg cs
cmp ax,sectors
jne ok3_read !如果当前磁道还有扇区未读,跳转到ok3_read
mov ax,#1 !说明当前磁道的扇区都已读完
sub ax,head !ax = 1 - 磁头号
jne ok4_read !不为0则跳转到 ok4_read,说明磁头号为0
inc track !说明磁头号为1,磁道号增加1
ok4_read:
mov head,ax !更新磁头号(如果是37行跳转过来,则 head=1;否则 head=0)
xor ax,ax !ax=0, 因为更换了磁道,所以当前磁道已读扇区数置0
ok3_read:
mov sread,ax !更新当前磁道已经读取的扇区数
shl cx,#9
add bx,cx !更新偏移地址
jnc rp_read !没有进位,则跳转到rp_read
mov ax,es !有进位,说明BX达到了64KB边界
add ax,#0x1000
mov es,ax !es增加0x1000
xor bx,bx !bx = 0
jmp rp_read !继续读取以上汇编代码看起来实在是费劲。为了便于理解,写成C语言伪代码如下:
void read_it(es)//参数是es
{
if((es & 0xFFF) != 0) //es 必须是0x1000的倍数,否则进入死循环
while(1); //dead loop
bx = 0;
while(es < ENDSEG){
// 1. 看看要读多少个扇区,用ax表示
// 2. sread:本磁道已经读取的扇区数
ax = SECTORS - sread;
if((ax * 512 + bx) > 0x10000){
ax = (0x10000 - bx) / 512;
}
read_track(ax); //调用读扇区过程,al:要读的扇区数,es:bx->缓冲区
cx = ax; //该次操作读取的扇区数
ax += sread; //ax是本磁道已读取的扇区总数
if(ax==SECTORS){
//本磁道的扇区全部读完
if(head == 1){ //0和1磁头都已经读完,更新磁道
++track;
head = 0; //从0磁头开始
}
else{
head = 1; //切换到1磁头
}
ax = 0; //本磁道已读扇区数置为0
}
sread = ax; //更新本磁道已读扇区数
bx += cx * 512; 更新偏移地址bx
if(bx == 0x10000)
{
//如果偏移地址到达0x10000,则更新es,并使bx=0
es += 0x1000;
bx = 0;
}
}
return;
}过程read_track
读取AL个扇区到ES:BX。此过程的入口参数是:
AL-要读的扇区数目
ES:BX-缓冲区地址
read_track:
push ax
push bx
push cx
push dx
mov dx,track !当前磁道号
mov cx,sread !已经读取的扇区数
inc cx !CL是起始扇区号
mov ch,dl !CH是磁道号----
mov dx,head !当前磁头号
mov dh,dl !DH是磁头号
mov dl,#0 !DL是驱动器号,0表示软盘
and dx,#0x0100 !DH是磁头号,不是0就是1
mov ah,#2 !功能号2,读扇区
int 0x13
jc bad_rt !CF=1,表示出错,复位磁盘
pop dx
pop cx
pop bx
pop ax
ret
bad_rt: mov ax,#0 !AH=0,磁盘复位功能
mov dx,#0 !DL=0,驱动器号
int 0x13
pop dx
pop cx
pop bx
pop ax
jmp read_track !重新读取过程kill_motor
kill_motor:
push dx
mov dx,#0x3f2 !软盘控制器的端口-数字输出寄存器端口,只写
mov al,#0 !驱动器A,关闭FDC,禁止DMA和中断请求,关闭马达
outb !将al的值写入端口dx
pop dx
retDOR(数字输出寄存器)
DOR是一个8位寄存器,他控制驱动器马达的开启、驱动器选择、启动/复位FDC以及允许/禁止DMA及中断请求。
| 位 | Name | Description |
|---|---|---|
| 7 | MOT_EN3 | Driver D motor:1-start;0-stop |
| 6 | MOT_EN2 | Driver C motor:1-start;0-stop |
| 5 | MOT_EN1 | Driver B motor:1-start;0-stop |
| 4 | MOT_EN0 | Driver A motor:1-start;0-stop |
| 3 | DMA_INT | DMA and IRQs; 1 enable; 0-disable |
| 2 | RESET | 0= enter reset mode;1= normal operation |
| 1 and 0 | DRV_SEL1, DRV_SEL0 | “Select” drive number for next access |
确认根文件系统设备号
seg cs
mov ax,root_dev !ax = ROOT_DEV
cmp ax,#0
jne root_defined !如果 ROOT_DEV 不等于0则跳转到 root_defined
seg cs
mov bx,sectors ! 取每磁道扇区数
mov ax,#0x0208 ! /dev/ps0 - 1.2Mb
cmp bx,#15 ! 判断每磁道扇区数是否等于15
je root_defined ! 说明是1.2MB的软盘
mov ax,#0x021c ! /dev/PS0 - 1.44Mb
cmp bx,#18 ! 判断每磁道扇区数是否等于18
je root_defined ! 说明是1.44MB的软盘
undef_root:
jmp undef_root ! 死循环
root_defined:
seg cs
mov root_dev,ax ! 将检查过的设备号保存到 root_dev 中在Linux中软驱的主设备号是2,次设备号 = type * 4 + nr.
其中,nr等于0~3时分别对应软驱A、B、C、D;type是软驱的类型,比如2表示1.2MB,7表示1.44MB等。
因为是可引导的驱动器,所以肯定是A驱。对于1.2MB,设备号 = 2 << 8 + 2 * 4 + 0 = 0x208;对于1.44MB,设备号 = 2 << 8 + 7 * 4 + 0 = 0x21C.
.org 508
root_dev:
.word ROOT_DEV !这里存放根文件系统所在设备号(init/main.c中会用)ROOT_DEV到底有何用,怎么用,这里先存疑,后面再探究。
跳转到 setup 去执行
jmpi 0,SETUPSEG !到此本程序就结束了。段间跳转,跳转到0x9020:0x0000(setup.s程序开始处)去执行。
代码分析到这里,就差不多明白了。虽然是一个引导扇区,编译后只有512字节,可是涉及的知识点还真不少。真是太佩服Linus了,一个大学生就能写出这样的代码,实属出众。
参考资料
[1]《Linux内核完全剖析》(赵炯,2006)
[2] https://github.com/Wangzhike/HIT-Linux-0.11/blob/master/1-boot/OS-booting.md
[3] https://wiki.osdev.org/Floppy_Disk_Controller#DOR_bitflag_definitions