视觉里程计(VisualOdometry)原理及实现
一、视觉里程计(VisualOdometry)介绍
目前,有不止一种方式可以确定移动机器人的轨迹,这里将重点强调“视觉里程计”这种方法。在这种方法中,单个相机或者双目相机被用到,其目的是为了重构出机器人6-DOF的轨迹。
视觉里程计通过分析一系列图像序列,来确定机器人的朝向和位置。
二、单目(monocular)与双目(stereo)视觉里程计比较
双目VO的优势在于,能够精确的估计运动轨迹,且具有确切的物理单位。在单目VO中,你仅仅只知道物体在x/y方向上移动了1个单位,而双目VO则可明确知道是移动了1cm。但是,对于距离很远的物体,双目系统则退化成为单目系统,如果说我们的机器人很小,那么双目看起来似乎与单目无异,所以现在也有很多人只关注、研究单目VO。所以,究竟使用哪种视觉里程计方法,取决于我们的应用场景。
三、双目视觉里程计数学原理
Input:左右相机图像序列,时刻t和t+1时采集的图像表示为It和It+1,相机内参文件已提前标定好。
Output:针对不同帧图像对,需要估算出两帧图像之间的旋转矩阵R和平移向量T。
算法提纲:
1.捕捉图像对It,It+1;
2.对以上图像进行畸变校准;
3.计算时刻t和t+1的视差图;
4.使用FAST算法检测图像It中的特征,并与图像It+1中的特征匹配;
5.利用深度图,计算上一步中匹配特征点的3D坐标值,此时,获得两组点云数据;
6.选取点云数据中的一部分子集,使得所有的匹配都是互相兼容的;
7.估算上一步检测中的内点(inliers)。
Undistortion,Rectification
在计算深度图之前,为了补偿镜头带来的畸变,通过相机标定以及校准等过程,可以得到去畸变的图像对,图像对通过校准后,同一目标在左右图像中的水平位置是对齐的。

Stereoimages overlayed from KITTI dataset, notice the feature matches arealong parallel (horizontal) lines
DisparityMap Computation
关于深度图重建方法此处不赘述,前面开发的SGBM与BM算法皆能够较好实现深度图重建。

Adisparity map computed on frames from KITTI VO dataset
FeatureDetection
使用高效的FAST特征代替SIFT做特征检测。假设需要检测一个点是不是角点,那么我们就在这个像素附近画一个圆,判断圆周上面的16个像素点的强度,如果有连续的一组像素的强度大于原始像素点的强度,另外有一组连续的像素点强度小于原始像素点的强度,那么,可标记该原始点为角点。一种启发式的方法用来拒绝非角点,只需通过判断1,5,9,13像素强度,至少有3个点的强度大于或小于原始像素值,那么就有可能是角点。
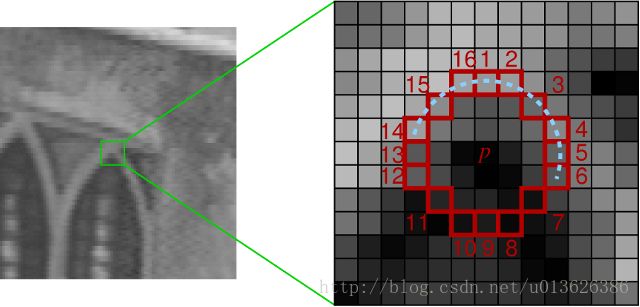
Image from the original FAST feature detection paper
为了整幅图上都有特征表达,选取一种“桶”特征的方式对全图进行表示,例如,将整幅图像分割成100x100pixel大小的网格,在每个网格块中,获取至少20个以上特征,这样整幅图像中就能够维持一个比较均匀的特征分布。
Feature Description andMatching
使用KLT方法跟踪上一步计算得到的角点特征,通过寻找每个角点进行跟踪。
Triangulation of 3D PointCloud
同一目标点的万维坐标计算也不必多说,利用标定参数文件,重投影矩阵Q即可计算结果。
The Inlier Detection Step
该算法不同于其他算法的是,不存在异常值检测步骤,但是存在正常值检测步骤。从原始的点云数据中,希望能够选取出最大的一个子集合,里面所有的点都是一致的,那么这个问题等价于最大团问题(MaximumClique Problem )
Computation of rotation matrixR and translation vector T
目前最常用的求解R,T的思路是先用RANSAC方法求出内点的集合,即把误匹配的外点(离群点)筛除,然后对内点的集合,采用线性最小二乘法去求得R,T的初值,代入初值并利用L-M非线性优化方法求得经过优化后的RT,作为最终值。
参考博客地址:Avi Singh's blog