树莓派笔记13:舵机云台(一)
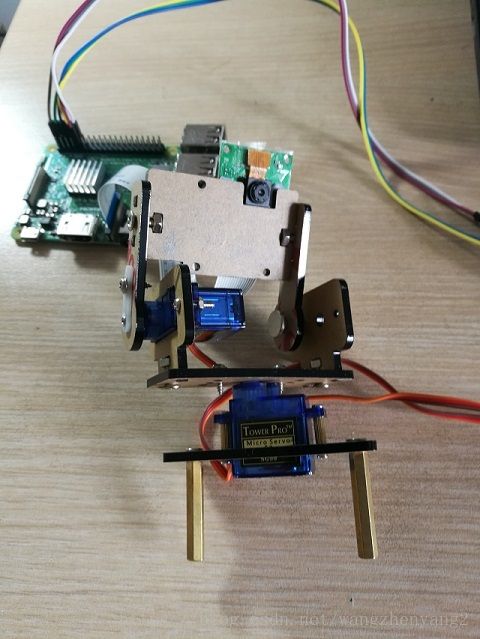
最近买了个小型舵机云台模块来玩,淘宝上卖这个的挺多的,一般三四十块钱,很多还卖配套的摄像头。说是云台,其实就是用两个舵机结合固定板做的支撑模块,两个舵机分别控制左右和上下的转动。
1 关于舵机
首先了解一下舵机的基本原理和工作过程(参考https://wenku.baidu.com/view/09ea6dd46bd97f192379e9b6.html?from=search)。
淘宝上卖的小舵机基本都是SG90,因此下面的相关数据都是针对SG90的。舵机就是可以自由指定转角的伺服马达,它有三根引出的线,红线是电源线,可以接5V输入;棕线是地线;橙线是信号线,也是我们唯一需要输入控制信号的线。在舵机内部,有一个周期20ms,脉宽1.5ms的基准脉冲,它对应于一个基准电压 V0 V 0 ;为了控制舵机,我们给信号线输入一个周期也为20ms,一定占空比的控制脉冲,这个脉冲经过调制芯片的处理成为一个偏置电压 V V ,舵机内部首先通过比较 ΔV=V−V0 Δ V = V − V 0 的正负来进行正相或反相转动,同时舵机内部带有平衡电位器,内部齿轮转动的同时会带动电位器变化,电位器会逐渐减小电压差 ΔV Δ V ,当电机转到指定角度时 ΔV Δ V 刚好为0,舵机停止转动。所以归结起来,要控制舵机转到指定角度,就给它输入指定占空比的脉冲波。
舵机的转角范围是0-180度,我们输入周期为20ms的脉冲,其脉宽、相应占空比和舵机转角之间的关系可以用下表表示。
| 脉宽 / ms | 占空比 / % | 转角 / ° |
|---|---|---|
| 0.5 | 2.5 | 0 |
| 1.0 | 5 | 45 |
| 1.5 | 7.5 | 90 |
| 2.0 | 10 | 135 |
| 2.5 | 12.5 | 180 |
2 一些关键数据的推算
在上表的基础上,我们需要计算一些关键参数。
根据上表,如果我们要使舵机转到指定的角度 θ(0≤θ≤180) θ ( 0 ≤ θ ≤ 180 ) ,则需要输入的脉冲占空比为:
D=2.5+θ180×(12.5−2.5)=2.5+θ180×10 D = 2.5 + θ 180 × ( 12.5 − 2.5 ) = 2.5 + θ 180 × 10
舵机转动需要一定时间,给它发指令应避免引起冲突。舵机的转速大概为0.2秒每60度,即 0.003s/° 0.003 s / ° 。而舵机的精度为 180°1024≈0.18° 180 ° 1024 ≈ 0.18 ° ,对应的脉冲占空比精度为 12.5−2.51024≈0.01 12.5 − 2.5 1024 ≈ 0.01 ,因此,在步进转动内(即每次转0.18°,后面直接取0.2°),给舵机发的指令间隔时间不应该低于 0.2×0.003=0.0006s 0.2 × 0.003 = 0.0006 s ,舍入一下即0.001s。而如果我们是任意指定转角,那么两次指令的间隔时间则应该长于 180×0.260=0.4s 180 × 0.2 60 = 0.4 s ,这是从0度转到180度的时间(当然可以根据比例关系精确计算两次指令的理论间隔时间,不过直接用0.4s就够了)。
此外,由于舵机上配套的固定板结构问题,可能舵机并不能完全从0转到180,比如我买的云台,下面控制水平转动的舵机可以自由180度转动,但上面控制垂直转动的舵机只能在90到180度转动,否则会被卡住。因此为了防止舵机损坏,需要注意舵机的转动范围,这个也需要在程序中体现。
3 程序设计
在树莓派中写python程序控制舵机。因为要给舵机输入脉冲波,需要使用RPi.GPIO库中的PWM方法,大概的GPIO控制逻辑可以由下面的代码表示:
GPIO.setmode(GPIO.BCM) #设定BCM编码模式
GPIO.setwarnings(False) #关闭警告
GPIO.setup(channel,GPIO.OUT) #设定通道为输出模式
pwm=GPIO.PWM(channel,frequency) #新建PWM对象,并指定频率
pwm.start(dutycycle) #启动PWM输出,并指定初始占空比
pwm.ChangeDutyCycle(dutycycle) #改变占空比
pwm.stop() #停止PWM
GPIO.cleanup()为了使舵机云台模块化,设计类来封装GPIO操作。Rotation类表示的是单个的舵机,封装了所有的GPIO操作;而Steering类则表示云台,它包含两个Rotation对象。Rotation类的代码,里面专门区分了步进转动和指定转动:
# -*- coding: UTF-8 -*-
import RPi.GPIO as GPIO
import time
# 这个类表示单个的SG90模块
class Rotation:
frequency=50 #脉冲频率(Hz)
delta_theta=0.2 #步进转动间隔(度)
min_delay=0.0006 #转动delta_theta的理论耗时(s)
max_delay=0.4 #从0转到180的耗时(s)
def __init__(self,channel,min_theta,max_theta,init_theta=0):
'''
构造函数:
channel: 舵机信号线所连接的树莓派引脚编号(BCM编码)
min_theta: 舵机转动的最小角度
max_theta: 舵机转动的最大角度
init_theta: 舵机的初始角度
'''
self.channel=channel
if(min_theta<0 or min_theta>180):
self.min_theta=0
else:
self.min_theta=min_theta
if(max_theta<0 or max_theta>180):
self.max_theta=180
else:
self.max_theta=max_theta
if(init_thetaor init_theta>max_theta):
self.init_theta=(self.min_theta+self.max_theta)/2
else:
self.init_theta=init_theta #初始角度
#计算最小角度、最大角度的占空比
self.min_dutycycle=2.5+self.min_theta*10/180
self.max_dutycycle=2.5+self.max_theta*10/180
def setup(self):
'''
初始化
'''
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(self.channel,GPIO.OUT)
self.pwm=GPIO.PWM(self.channel,Rotation.frequency) #PWM
self.dutycycle=2.5+self.init_theta*10/180 #脉冲占空比的初始值
self.pwm.start(self.dutycycle) #让舵机转到初始位置
time.sleep(Rotation.max_delay)
def positiveRotation(self):
'''
正相步进转动,每次调用只转动delta_theta度
'''
self.dutycycle=self.dutycycle+Rotation.delta_theta*10/180
if self.dutycycle>self.max_dutycycle:
self.dutycycle=self.max_dutycycle
self.pwm.ChangeDutyCycle(self.dutycycle)
time.sleep(Rotation.min_delay)
def reverseRotation(self):
'''
反相转动,每次调用只转动delta_theta度
'''
self.dutycycle=self.dutycycle-Rotation.delta_theta*10/180
if self.dutycycledef specifyRotation(self,theta):
'''
转动到指定的角度
'''
if(theta<0 or theta>180):
return
self.dutycycle=2.5+theta*10/180
self.pwm.ChangeDutyCycle(self.dutycycle)
time.sleep(Rotation.max_delay)
def cleanup(self):
self.pwm.stop()
time.sleep(Rotation.min_delay)
GPIO.cleanup() Steering类的代码如下,它的两个Rotation属性分别代表了水平转动和垂直转动舵机:
import Rotation
class Steering:
def __init__(self,channelH,min_thetaH,max_thetaH,
channelV,min_thetaV,max_thetaV,init_thetaH=0,init_thetaV=0):
'''
构造函数
channelH: 水平舵机的信号通道
min_thetaH: 水平舵机最小转角
max_thetaH: 水平舵机最大转角
channelV: 垂直舵机的信号通道
min_thetaV: 垂直舵机最小转角
max_thetaV: 垂直舵机最大转角
init_thetaH: 水平舵机初始转角
init_thetaV: 垂直舵机初始转角
'''
self.hRotation=Rotation(channelH,min_thetaH,max_thetaH,init_thetaH)
self.vRotation=Rotation(channelV,min_thetaV,max_thetaV,init_thetaV)
def setup(self):
self.hRotation.setup()
self.vRotation.setup()
def Up(self):
'''
向上步进转动(每次调用只转动0.2度)
'''
self.vRotation.positiveRotation()
def Down(self):
'''
向下步进转动(每次调用只转动0.2度)
'''
self.vRotation.reverseRotation()
def Left(self):
'''
向左步进转动(每次调用只转动0.2度)
'''
self.hRotation.positiveRotation()
def Right(self):
'''
向右步进转动(每次调用只转动0.2度)
'''
self.hRotation.reverseRotation()
def specify(self,thetaH,thetaV):
'''
转动到指定的角度
'''
self.hRotation.specifyRotation(thetaH)
self.vRotation.specifyRotation(thetaV)
def cleanup(self):
self.hRotation.cleanup()
self.vRotation.cleanup()4 测试
导入Steering模块,编写测试程序,先是让云台在四个方向上都连续转动,再转到几个指定角度。代码和测试结果如下:
from Steering_Module.Steering import Steering
import time
steer=Steering(14,0,180,15,90,180,36,160) #初始位置为36和160,此时云台是正对前方,通过调试得到这两个值
steer.setup()
time.sleep(2)
for i in range(0,900):
steer.Up()
for i in range(0,900):
steer.Down()
for i in range(0,900):
steer.Left()
for i in range(0,900):
steer.Right()
steer.specify(80,120)
steer.specify(20,100)
steer.specify(170,180)
steer.cleanup()